

基于两电平SVM改进的直接转矩控制
电子说
描述
导读:本期对基于SVPWM的永磁同步电机直接转矩控制进行全面的分析和仿真搭建。之后与传统的DTC进行比较,凸显基于SVPWM改进的DTC方法的有效性。
一、 传统永磁同步电机直接转矩控制系统存在的问题
传统直接转矩控制系统对定子磁链和电磁转矩进行直接控制,通过滞环比较器在开关表中选择合适的电压空间矢量来控制逆变器的输出。控制系统的优点有 :
(1)省去了复杂的坐标变换,系统结构简单。
(2)转矩能快速响应电机参数的变化。
(3)控制系统对电机的参数依赖性小,系统鲁棒性好。
但是由于滞环比较器的使用,定子磁链观测的准确性及离散的空间电压矢量等因素致使直接转矩控制系统在实际使用中存在如下问题:
(1) 低速状态下的电磁转矩脉动大;
(2) 控制系统采用滞环比较器,无法适应先进的控制理论;
(3) 稳态时,定子电流含有的谐波比重大,导致定子磁链轨迹发生畸变;
(4) 开关频率不固定,电压利用率低;
从理论上分析这些问题发生的主要原因如下:
1. 滞环控制器带来的影响
传统的直接转矩控制是通过设置滞环比较器的容差大小来控制磁链和转矩的,所以定子磁链的畸变和转矩的脉动都受到滞环比较器容差范围的影响。滞环比较器的输出只是一个“0”或“1”比较结果,而并不能以一个数值来说明大小的范围。如果滞环比较器的容差设置太大,那么必然会引起磁链畸变和转矩脉动。如果滞环控制器的容差设置太小,由于转矩和磁链的惯性,实际上磁链和转矩的偏差都会不可避免的超出容差范围,此时控制器为使偏差迅速减小,会输出相反方向的控制信号,但这种动作会带来较大的瞬时脉动。如果磁链和转矩偏差恰好处于容差之内时,滞环比较器这时并不对其控制,所以转矩或磁链值也会一直在容差范围内波动。所以,控制系统中只要使用滞环比较器,磁链的畸变和转矩的脉动就无法消除。
2. 有限的电压空间矢量带来的影响(只考虑了误差大小而没有考虑方向)
传统的直接转矩控制系统中通过查表选择空间电压矢量来控制异步电机,这种控制方法虽然简单,但是却有缺陷。由于系统中可用的空间电压矢量数量有限,两电压矢量之间的切换不连续,而要用这些离散的电压矢量对连续的磁链轨迹进行调节,这样就一定会导致磁链和转矩的脉动。直接转矩控制系统选择的电压矢量大小和方向都是固定的,只能对磁链和转矩进行大小调节,但是并没有具体的调节数值。因此,这种开关表选择原则十分粗略,不能精确地控制转矩和磁链。
3. 定子磁链的观测带来的影响
直接转矩控制需要对定子磁链的幅值和磁链的相位进行实时地测定,目前由于磁链的直接观测较为复杂,根据异步电机的磁链方程,可以通过测量定子电压、定子电流以及转速等信号来间接地估计出定子磁链的大小。定子磁链的观测,需要建立磁链观测模型,在第二章中我们介绍过三种磁链观测模型,经过分析,其各有优缺点,但是都不能实现准确的磁链观测。转矩的计算和磁链扇区的判断都受磁链观测的准确性的影响,磁链观测失误,会造成电机失控。因此,定子磁链的观测是直接转矩控制的一个难点,也是影响系统性能的关键因素之一。
影响直接转矩控制性能的因素不止以上分析的这三方面,导致磁链和转矩观测不准还有逆变器的死区效应,定子电阻值的准确测定等等,这些因素都会影响系统控制的性能,在此就不一一赘述。
二、永磁同步电机直接转矩控制系统的改进
经过对直接转矩控制系统缺陷的分析我们知道,要想改善这种缺陷就要从克服系统中滞环比较器的影响,调制出更多的空间电压矢量对磁链进行连续平滑的控制,保证开关频率固定这几方面入手。国内外许多学者从不同角度提出了许多改进方法。如美国学者 Habetler 提出的无差拍控制技术,其控制思路就是在一个控制周期内根据磁链和转矩的误差计算出能使误差为零的定子电压矢量,并在下一个控制周期中使用 SVPWM技术将其合成来实现控制。无差拍技术是解决直接转矩控制系统缺陷的一个很好的方案,但是需要庞大的计算量,所以难以实现。但是在借鉴无差拍技术的基础上,我们提出基于空间矢量脉宽调制(SVPWM)方法的直接转矩控制系统,基本思想就是通过上一个周期反馈的磁链和转矩与给定值进行比较,由比较结果得出下一个控制周期内所期望的电压矢量,然后利用空间矢量脉宽调制方法来合成该预期的电压矢量来进行控制。
图1为基于SVPWM的异步电机直接转矩控制系统(SVPWM-DTC)的结构框图。
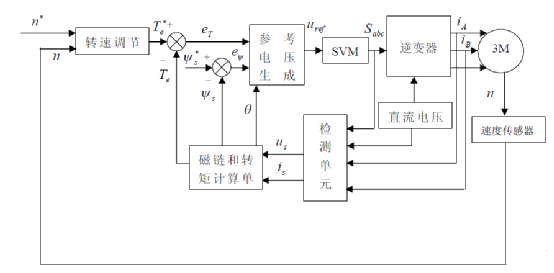
图1 SVPWM—DTC系统框图
在改进后的控制系统中,将滞环比较器替换为控制性能更为卓越的PI 控制器,SVPWM 模块可以根据磁链和转矩偏差的大小和方向,实时精确的调制出任意的改变磁链和转矩所需的电压空间矢量,实现磁链的平滑调节,而不受开关表中空间电压矢量数量的限制。该方案能使逆变器开关频率恒定,从而可以大大降低转矩、磁链的脉动。
该系统采用的是一种先进的脉宽调制策略,将逆变器和异步电机看做一个整体来控制,控制系统具有直流电压利用率高、算法简单、谐波损耗及噪声低等特点,将先进的控制理应用到直接转矩控制系统中,大大提高了系统的性能。
2.1 SVPWM 调制算法
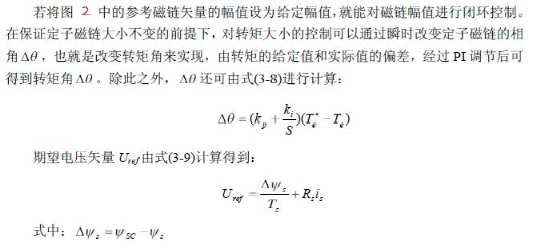
(1) 期望电压ref U 的生成
下一个周期所需期望电压矢量的生成需要让定子磁链和电磁转矩在上一个周期内都能跟踪期望值,从而利用其与期望值的偏差控制下一个周期内定子磁链和电磁转矩的大小。
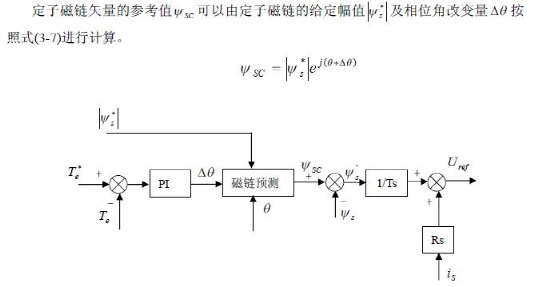
图2期望电压矢量的生成
(2) 扇区判断
关于SVPWM的部分,可以看公众号往期关于SVPWM的文章。
(3) 仿真模型搭建
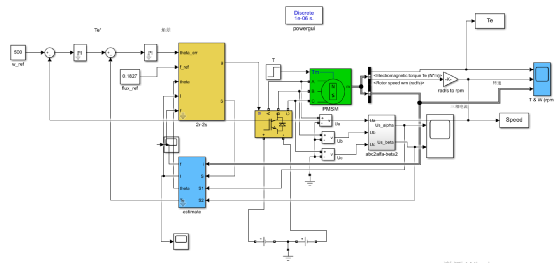
图3 基于SVPWM的永磁同步电机直接转矩控制的仿真模型
图3中仿真,最难的部分就是参考电压矢量模块的搭建,模块如下:
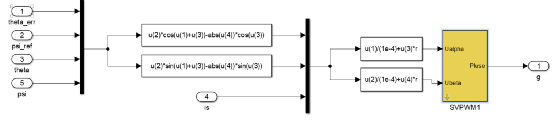
图4 参考电压矢量模块搭建
转矩偏差、定子磁链参考值、定子磁链所处角度、定子磁链实际值及两相静止坐标系下的定子电流为电压控制器的输入,其输出为期望电压矢量在两相静止坐标系下的两个分量。
三、仿真波形
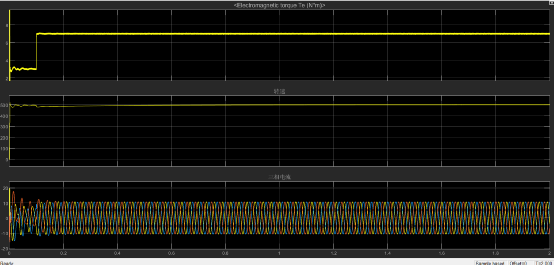
图4 波形变化情况
四、总结
本文对传统直接转矩控制系统调速性能的缺陷和不足进行了理论分析,提出了基于空间矢量脉宽调制技术(SVPWM)的永磁同步电机直接转矩控制控制系统,并详细介绍了SVPWM 的调制原理和调制算法,其主要采用预测的思想合成系统控制所需的期望电压矢量。最后,通过simulink 仿真软件建立了SVPWM 仿真模块,并对其进行了仿真分析。
理论分析表明,基于SVPWM的永磁同步电机改进的DTC能够保持电机定子磁链幅值恒定,观测准确,磁链运动轨迹接近圆形,磁链和电磁转矩的控制平滑,能有效解决传统直接转矩控制系统存在的转矩和磁链脉动较大,开关频率不恒定等问题。
审核编辑:汤梓红
-
感应电机传统三电平直接转矩控制方法2023-12-14 1984
-
异步电机直接转矩控制(12扇区三电平SVPWM)2023-03-29 700
-
基于SVM改进的异步电机直接转矩控制系统设计2022-10-14 1823
-
求一种改进的模型预测直接转矩控制算法2021-07-06 1332
-
如何简化两电平SVM调制方法详细说明2019-07-06 7269
-
三电平逆变器占空比调制直接转矩控制2018-03-14 1362
-
T型三电平逆变器馈电双三相PMSM直接转矩控制2018-01-22 1564
-
直接转矩控制原理和特点2017-11-23 23131
-
直接转矩控制2017-01-21 606
-
基于空间矢量调制的PMSM直接转矩控制研究2015-12-18 1099
-
基于模糊控制器的异步电机直接转矩控制2011-11-14 1651
全部0条评论

快来发表一下你的评论吧 !
