

墨鱼眼睛启发的人工视觉,可在不均匀的照明条件下实现高质量成像
描述
人工视觉可以在移动机器人中发挥关键作用,包括自动驾驶汽车,以监控周围环境并检测接近的物体以避免碰撞,这可以部分或完全替代在不断变化的光线条件下易受伤害的人类视觉。对于此类应用,物体的高可检测性很重要,这通常需要高对比度和高敏锐度的成像系统。基于相机的视觉系统因其低成本、小尺寸和单次图像捕获能力,支持图像检测。然而,有限的图像对比度,特别是在垂直不均匀的照明条件下,由于上视野中的强烈阳光散射和从周围玻璃表面反射的随机偏振太阳光噪声,严重阻碍了高质量成像,从而导致物体可检测性低。而汽车驾驶员可以通过遮阳板和太阳镜物理阻挡强烈的上部阳光并减轻偏振噪音。这有用于移动机器人和自动驾驶汽车的人工视觉系统利用基于软件的方法来解决这种不利的光照条件。然而,系统应处理的大量视觉信息需要很高的计算能力和能耗。因此,需要适当的硬件解决方案来处理非均匀的光条件,最大限度地减少偏振光噪声,并减少数据处理量。
同时,自然界中的视觉系统激发了具有独特功能的人工视觉系统的发展。例如,水生和两栖动物已经进化到具有针对其栖息地优化的眼睛,这些都激发了各种人工视觉系统。受鱼眼全景成像能力的启发,开发了由单中心透镜和半球形硅纳米棒光电二极管阵列组成的小型化宽视场(FOV)成像系统。受象鼻鱼(Gnathonemus petersii)的视网膜结构的启发,它可以增强在低光条件下收集的光强度,已经开发出一种由微量光收集器组成的光敏增强剂。受螳螂虾(如齿趾虾)的高光谱和极化成像策略的启发,已经开发出一种由偏振敏感有机光电探测器和折叠聚合物缓凝剂组成的图像传感器。受生活在潮间带地区的提琴蟹(Uca arcuata)的扁平角膜微透镜和柄眼结构的启发,已经开发出一种具有360°FOV的全天候成像系统,该系统由多层扁平微透镜和球形硅光电二极管阵列组成。尽管为开发各种生物启发的人工视觉系统做出了这样的努力,但尚未开发出一种可以平衡垂直不均匀照明,同时在由于随机偏振阳光的高噪声条件下实现高对比度和敏锐度的系统。
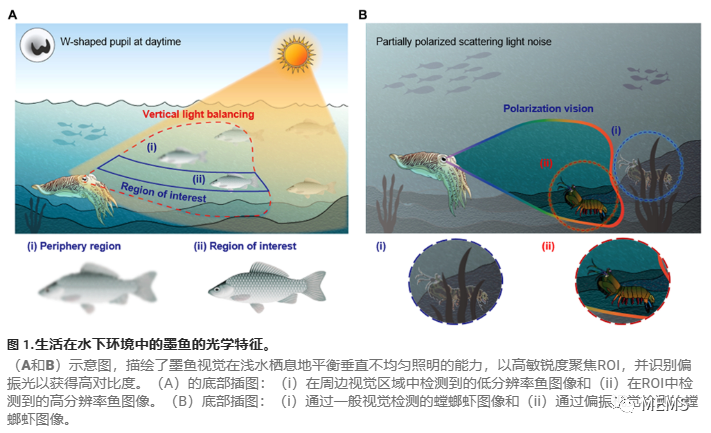
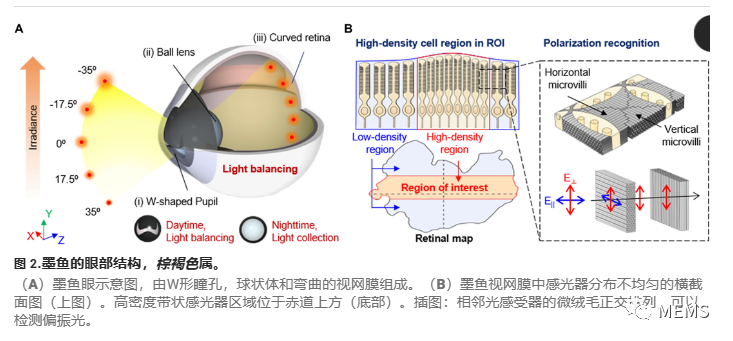
在这种情况下,墨鱼(棕褐色属)已经进化为具有针对垂直不均匀照明和偏振光检测优化的高敏锐度视觉系统(分别为图1,A和B),激发了移动机器人的高性能人工视觉。墨鱼具有独特的眼睛结构,由W形瞳孔(图2A i),单个球形晶状体(图2A ii)和弯曲的视网膜(图2A iii)组成,具有高密度带状感光器区域(图2B)和偏振敏感光感受器(图2B,右插图)。在白天,独特的W形瞳孔通过平衡垂直不均匀的照明使墨鱼具有高对比度的视力(图1A,红色虚线区域)。视网膜中的高密度带状感光器区域允许其感兴趣区域(ROI)具有高视力(图1A,ii与i)。这种带状感光器分布是检测地平线附近接近物体的最佳选择。此外,光感受器的水平或垂直堆叠的微绒毛允许墨鱼通过提取从目标物体反射的偏振光并过滤掉随机偏振的背景噪声来有效地识别伪装的猎物(图1B,ii与i),从而增强视觉对比度。
受墨鱼视觉系统这种独特的结构和功能特征的启发,研究人员提出了一种人工视觉系统,该系统可在垂直不均匀的照明条件下实现高对比度和高敏锐度成像,以实现高性能人工视觉,从而有望在移动机器人中应用。人工视觉系统中的W形瞳孔通过减少垂直FOV顶部的入射光来补偿不均匀的垂直光分布。此外,圆柱形硅光电二极管阵列(c-Si-PDA)包括高密度带状像素区域,可在ROI中实现高敏锐度成像。集成在c-Si-PDA表面的柔性碳纳米管(CNT)-偏振膜(FCPF)在可见光波长范围内保持~78%的平均偏振度,从而实现偏振敏感成像。通过集成这些光学和电子元件,开发了一种人工视觉系统,该系统可以平衡不均匀的光分布,同时实现高对比度和敏锐度。

论文信息:
https://www.science.org/doi/10.1126/scirobotics.ade4698
审核编辑 :李倩
-
LITESTAR 4D应用:温室植物照明案例2024-08-13 5370
-
不均匀性的定义 PPT学习资料2009-11-02 3310
-
OMNIVISION DSC等级的高质量成像产品2018-10-30 1286
-
基于不均匀密度的自动聚类算法2009-04-09 716
-
应用于工业检测的光照不均匀图像的校正2010-01-15 780
-
照度不均匀图像的自动Gamma灰度校正2010-03-01 1159
-
OMNIVISION推出DSC等级的高质量成像产品2009-06-29 1101
-
RTC 计秒不均匀2015-12-07 500
-
机器人静电喷涂不均匀的原因有哪些2020-12-26 1394
-
浅谈连接器电镀不均匀的原因2022-12-07 2774
-
DataParallel里为什么会显存不均匀以及如何解决2022-12-14 2096
-
太阳光模拟器丨辐照不均匀度的定义和标准2025-07-24 1245
-
碳化硅衬底 TTV 厚度不均匀性测量的特殊采样策略2025-08-27 1452
-
【新启航】碳化硅衬底 TTV 厚度不均匀性测量的特殊采样策略2025-08-28 990
-
电机转子磁场不均匀的原因有哪些?2025-12-30 1012
全部0条评论

快来发表一下你的评论吧 !
