

介绍一种导弹空气舵刻线视觉检测技术
电子说
描述
项目背景
导弹自第二次世界大战问世以来,受到各国普遍重视,得到快速发展。通常通过空气舵控制导弹的飞行姿态和飞行轨迹的调整和改变,它位于弹体表面,通过改变空气气流来产生改变导弹飞行姿态的侧向控制力。图1.1所示即为某型号导弹的空气舵。
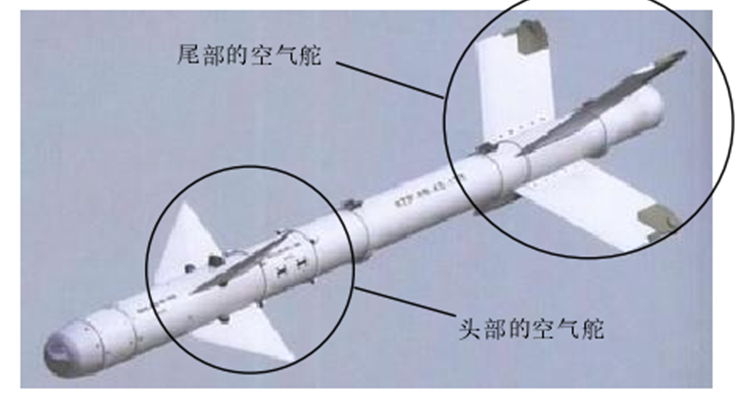
图1.1 某型号导弹空气舵(来源:知网 )
在空气舵的装配过程中,装配精度对飞行器控制有着重要的影响。实现导弹控制舵面装配质量的高精度、自动化检测对提高导弹总装测试效率、缩短研制周期等具有非常重要的意义。
主要功能
飞行器舱段的空气舵与舱体的装配关系如图2.1所示。衡量空气舵装配质量的主要技术参数包括零位偏差和晃动量。零位偏差和晃动量均由舱体刻线和空气舵刻线的间距计算出来。零位偏差是指被测舱体空气舵处于零位状态时,舵面刻线相对舱面刻线的水平距离。晃动量是指推动被测舱体空气舵时,其顺时针、逆时针两个行程距离之和。
图2.2为HIT-KX-00影像测量系统,用于满足舱体空气舵装配精度的检测需求。
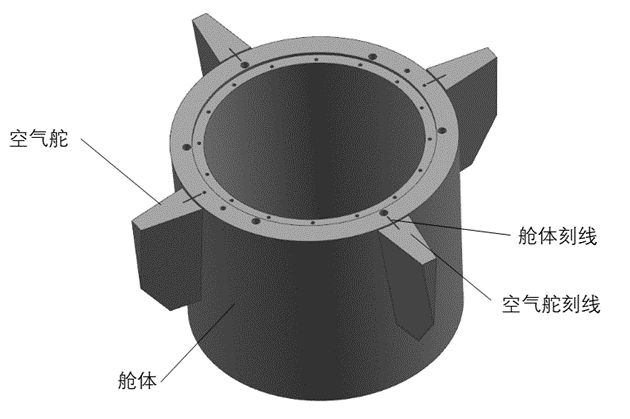
图2.1 空气舵与飞行器舱体装配示意图

图2.2 HIT-KX-00影像测量系统外形图
影像测量系统主要实现的功能如下:
(1) 实现特定摄距条件下,影像采集系统像素当量的标定;
(2)实现有舵舱体空气舵装配精度参数零位偏差和晃动量的检测;
(3)采集测量影像,实现空气舵装配精度参数的科学计算和评定,保存并输出测量结果;
(4)实时保存测量影像、过程处理影像及过程参数,实现测量结果的可溯源。
技术路线
1
系统工作原理:
HIT-KX-00影像测量系统是基于现代视觉测量技术的基本原理研制而成,它利用定焦镜头对被测物面进行成像,由光电传感器(相机)接收光学成像并将其转换成电子图像,由上位机软件对图像进行处理,提取出特征信息。
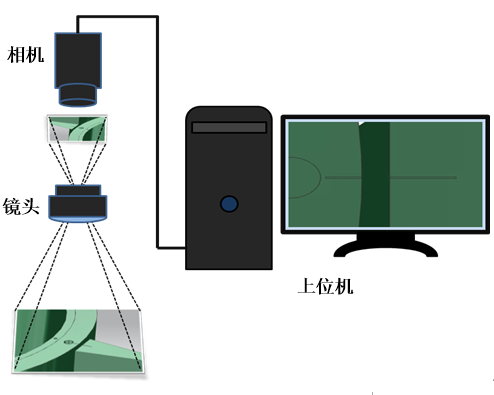
图3.1 影像测量系统基本原理图
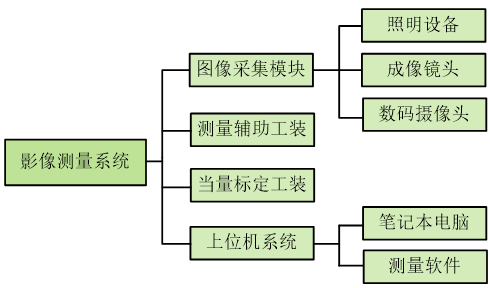
图3.2 影像测量系统组成图
上位机获得检测影像后,专用测量软件对测量影像进行处理,提取出舱体刻线和舵体刻线,并计算出两条刻线之间的像素距离,结合影像采集系统的像素当量(通过标定获得)即可得到两条刻线的实际几何距离。通过检测舵体两个状态下舱线舵线的几何距离来计算出空气舵装配精度参数零位偏差和晃动量。
2
图像采集模块:
图像采集模块用于直接摄取被检测的物面。核心部件是定焦镜头、相机和LED光源。图像采集模块是根据被测物面的视场大小需求、图像分辨率需求进行设计的。
3
测量算法:
首先对获取到的刻线局部图像进行预处理,图像预处理主要包括直方图拉伸处理和图像水平均值滤波两个部分,接下来使用Prewitt 算子进行边缘提取,得到刻线的上下边缘图像,然后利用最大类间方差法得到的自适应阈值对图像进行二值化处理,根据刻线的几何形态特征筛选出刻线上下边缘,最后利用最小二乘法分别拟合出刻线上下边缘的位置,根据上下边缘的位置计算出刻线位置,从而实现刻线的自动瞄准。
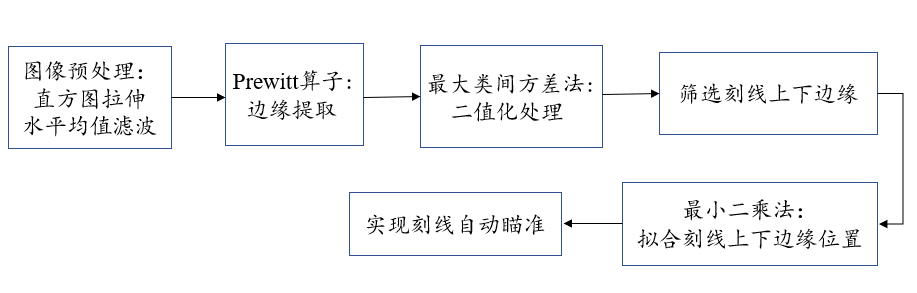
图3.5 测量算法框图
项目成果展示
本系统的主要功能是实现有舵舱体空气舵装配精度参数零位偏差和晃动量的自动检测,系统对零位偏差和晃动量实现了±0.04mm的测量精度。图4.1为配套的上位机软件界面,和某次试验所有象限晃动量和零位偏差测量结果。
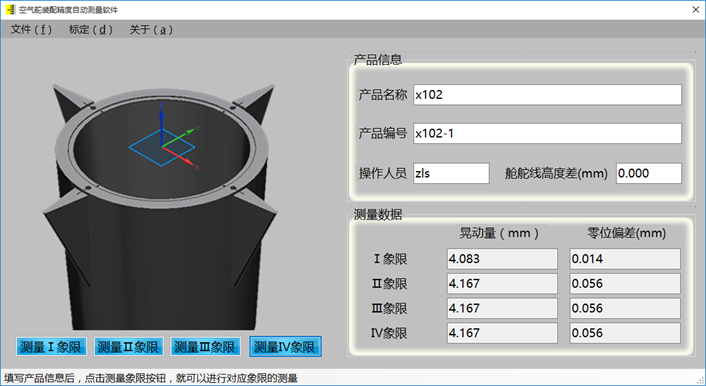
图4.1 象限晃动量和零位偏差测量结果
结语
本文介绍了导弹空气舵刻线视觉检测技术。空气舵刻线检测系统对导弹空气舵进行了检测,实现了对零位偏差和晃动量±0.04mm的测量精度。计算机软件界面美观,操作简单,能够完成系统标定、装配参数测量、导出报表等功能。
审核编辑:刘清
-
机器视觉表面缺陷检测技术2016-01-20 6353
-
介绍一种汽车无线接入技术的解决方案2021-05-12 1853
-
介绍一种GPS/GSM远程定位技术2021-05-25 1327
-
介绍一种无线电测向技术2021-05-26 1695
-
介绍一种远程呈现视觉协同运作解决方案2021-06-07 1797
-
求大佬分享一种基于毫米波雷达和机器视觉的前方车辆检测方法2021-06-10 2161
-
怎样去设计一种基于MQ135+STM32的环境空气质量检测装置2021-10-19 2940
-
介绍一种按键检测电路2022-01-18 1673
-
一种防空导弹信息共享方法研究Study on an Info2009-06-09 630
-
贴片机视觉检测中角度计算的一种高效算法2010-03-02 890
-
导弹发射机构自动检测装置的研究与设计2009-05-19 1073
-
一种基于机器视觉的缺陷检测系统2022-03-31 2156
-
一种基于区块链的导弹蜂群协同制导机制2023-01-13 2671
-
视觉检测技术冲破人工界限2024-03-15 728
全部0条评论

快来发表一下你的评论吧 !
