

一种基于微分Mach-Zehnder干涉仪的光纤应变速率传感器
电子说
描述
01 导读
光纤应变传感器已经被广泛研究和应用,可通过光纤应变实现物体形变的直接测量。而光纤应变速率传感器,则关注于光纤或物体形变的应变微分(即应变速率或应变率)的直接测量。在地球物理科学和地震科学方面,应变速率可以用于反映地壳形变速率、地震活动构造以及地质构造情况。
与地壳运动有关的应变速率可以通过全球定位系统(GPS)、合成孔径雷达干涉测量技术(InSAR)以及DAS这几种方式进行测量。但是,这些测量方式属于间接测量,且依赖大量数据的记录和分析,技术手段相对复杂。目前,直接测量应变速率的传感器或传感技术鲜有报道,远不及光纤应变传感技术的普及。
近日,中国科学院半导体研究所张文涛研究员团队提出一种基于微分干涉仪的光纤应变速率传感器。它可以通过微分干涉仪直接测量应变速率,将应变速率转换为光学相位。采用长12.1 m的传感光纤进行实验,结果表明,光纤应变速率传感器在工作频带内具有65.50 dB的平坦灵敏度、纳米量级(nε/s)的分辨率和优于95 dB的动态范围。该传感器的高分辨率和平坦幅频响应,优于DAS在火山监测和微地震探测中的应变速率测量能力,表明该传感器有潜力应用于地球物理监测和地震事件探测。
02 研究背景
在地球物理科学和地震科学方面,应变速率在大地应变测量、构造研究和地壳形变观测中具有重要意义,有助于研究抗震变形、地震活动性和地震危险性评估。当前,可以通过全球定位系统(GPS)、合成孔径雷达干涉测量技术(InSAR)以及DAS这几种方式来测量与地壳运动有关的应变速率。但是,这些方式都无法实现应变速率的直接测量,且依赖于大量数据的记录和分析。一些可以直接测量应变速率的传感器已经被报道,如压电式、可变磁阻变压器式以及光纤多普勒式,它们被用于高层建筑或结构的主动控制。尽管它们表明直接测量应变速率比应变微分具有更高信噪比,但缺少对灵敏度、分辨率和动态范围等传感器性能的进一步研究。此外,依然缺少可用于在地球物理学和地震学中直接测量应变速率的传感器。
本研究提出了一种基于微分Mach-Zehnder干涉仪的光纤应变速率传感器(FOSRS)。利用微分干涉仪的光路结构,通过一根传感光纤实现对应变速率的简单、直接和高分辨率测量,以将FOSRS应用于地球物理监测和地壳变形观测。而且,首次系统性研究了应变速率传感的灵敏度、分辨率和动态范围。
03 创新研究
3.1 传感原理
FOSRS的系统配置如图1所示,1×2耦合器和法拉第旋转镜之间的传感光纤用于直接感测应变速率,不平衡Mach-Zehnder干涉仪和法拉第旋转镜组成了微分干涉仪。当应变速率导致传感光纤长度拉伸,从不平衡Mach-Zehnder干涉仪进入传感光纤的两束光,其光学相位均受到应变速率的调制。当它们被法拉第旋转镜反射,回到干涉仪中,并在3×3耦合器处发生干涉,干涉光相位变化是受应变速率调制的两个光学相位之差。注意,只有分别完成顺时针传输和完成逆时针传输的光束才能满足干涉条件。由于两个光学相位受调制的时间差极小(和干涉仪臂长差有关),干涉光相位变化和应变速率调制的相位微分呈线性相关。由此,通过微分干涉仪的光路,构建了干涉仪光相位变化和应变速率之间的直接关系。本研究中采用基于3×3耦合器的反正切解调算法,通过解调干涉光的相位变化,实现应变速率的直接测量。
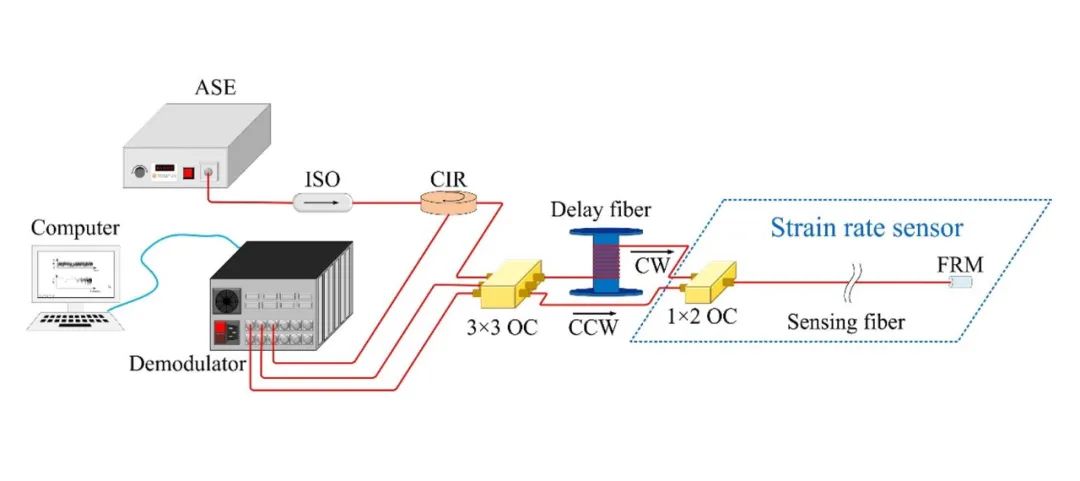
图1 光纤应变速率传感器系统配置 图源:Photonics Research(2022)
3.2 灵敏度研究
理论研究表明,FOSRS的灵敏度不是信号频率的函数,在工作频带上其幅频响应是一致的。搭建了如图1所示的实验系统,采用相位拉伸器(PZT)拉伸传感光纤以施加应变速率。传感长度为12.1 m的光纤应变速率传感器,其测量灵敏度在0.1 Hz~1000 Hz几乎是平坦的,与理论灵敏度曲线具有相同的平坦趋势。
这表明,在任何工作频带上,FOSRS对应变速率的响应能力是相同的。实验测得的平均灵敏度为2988.23 rad/(ε/s)(即69.50 dB),最大波动为0.61 dB。测量灵敏度与理论灵敏度68.19 dB之间相差1.32 dB。从测量角度来看,差异主要来自光纤长度测量、光源波长变化、PZT拉伸光纤带来的误差。这种差异被认为是允许的。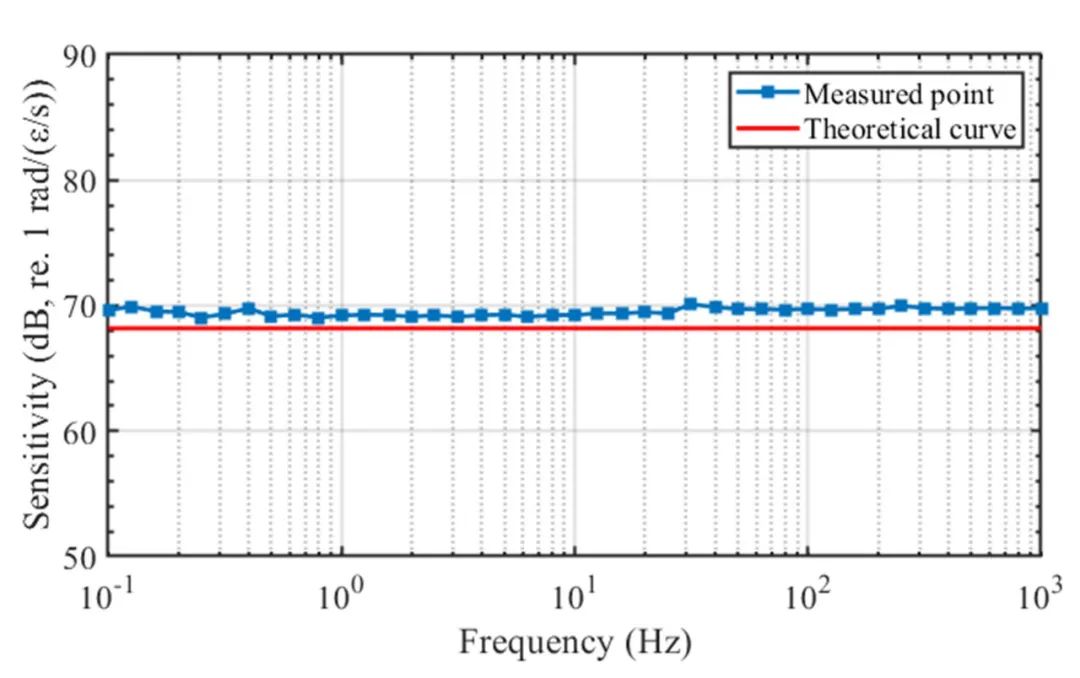
图2 测量灵敏度与理论曲线的比较 图源:Photonics Research(2022)
3.3 分辨率研究
FOSRS的相位本底噪声决定了应变速率分辨率。由ASE光源不同频率的随机跳动引起的相对强度噪声(RIN)是限制FOSRS分辨率的重要因素,RIN可通过基于3×3耦合器的反正切解调算法,转化为等效相位噪声。 在温度相对稳定、振动干扰较小的地下室测试了FOSRS的噪声和分辨率。记录一分钟相位,其PSD如图3所示,用黑线表示。测试了探测器三个通道的RIN,并计算了RIN的等效相位噪声,如图3中红线所示。RIN的等效相位噪声接近测量的相位本底噪声。在1 kHz时,以2988.23 rad/(ε/s)的测量灵敏度计算,RIN限制的应变速率分辨率为0.94 nε/s/√Hz,接近实测动态分辨率1.58 nε/s/√Hz。因此,降低RIN是提高FOSRS动态分辨率的主要途径。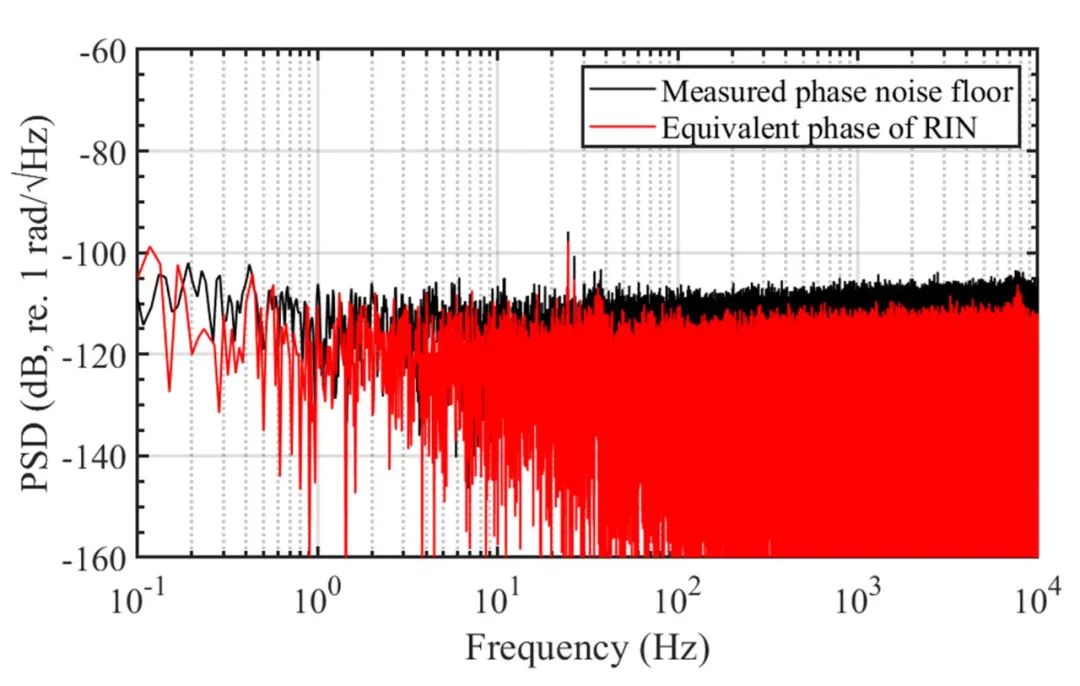
图3 实测相位噪声和RIN的等效相位噪声的比较 图源:Photonics Research(2022)
此外,还探讨了FOSRS的静态分辨率。记录10分钟内的相位变化。由于感兴趣的是静态应变速率测量,因此使用截止频率为1 Hz的低通滤波来处理记录的相位。结果如图4所示。记录相位的标准偏差计算为2.0192×10-5 rad。使用平均测量灵敏度,静态应变速率分辨率为6.76 nε/s。使用PZT拉伸传感光纤,该FOSRS可以在0.05 Hz频率下测量到23.14 nε/s的应变速率方波信号,如图5所示,这表明该FOSRS具有测量nε/s静态应变速率的能力。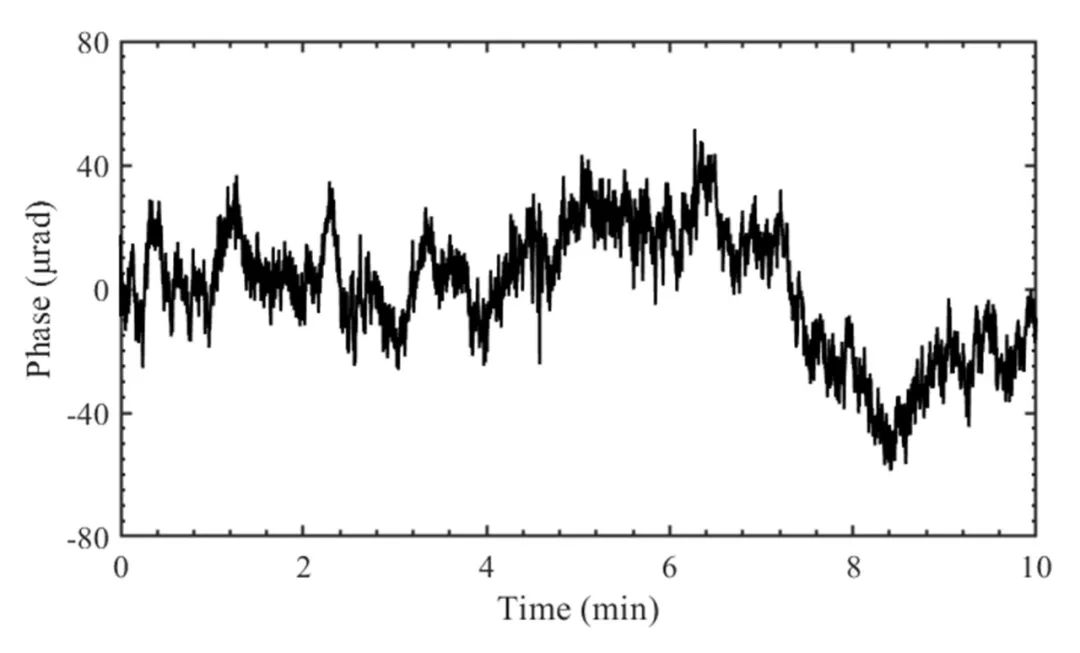
图4 记录的10分钟相位噪声 图源:Photonics Research(2022) 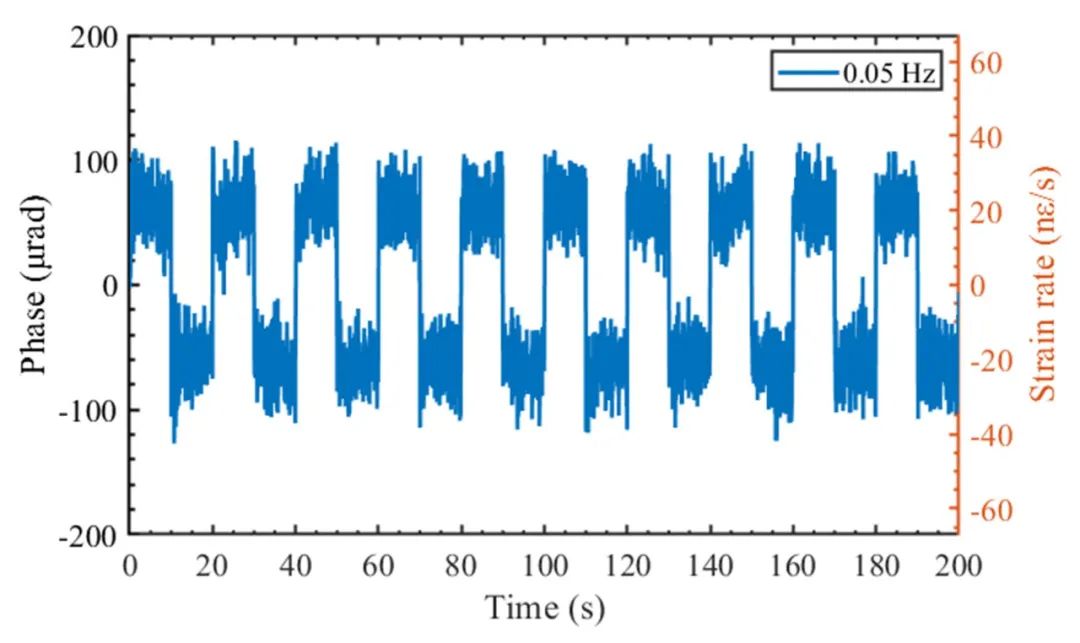
图5 记录的0.05 Hz的方形信号 图源:Photonics Research(2022)
3.4 动态范围研究
FOSRS的动态范围可以通过推断最大可测应变速率来分析。微分干涉仪中两束光的光程差应小于ASE光源的相干长度。理论上低相干光源的相干长度为λ2 0/Δλ。本实验中采用C波段ASE光源(中心波长1545 nm,谱宽33.377 nm),低相干长度对应的最大可测应变速率约0.1 ε/s。结合FOSRS的静态分辨率为6.76 nε/s,静态测量下,动态范围是有望达到140 dB以上。
在动态测量中,最大可测应变速率受总谐波失真的影响。考虑总谐波失真为10%,可测的应变速率为最大值。结合图3的功率谱密度,可以给出FOSRS的动态范围,是随着信号频率的增加而减小,如图6所示。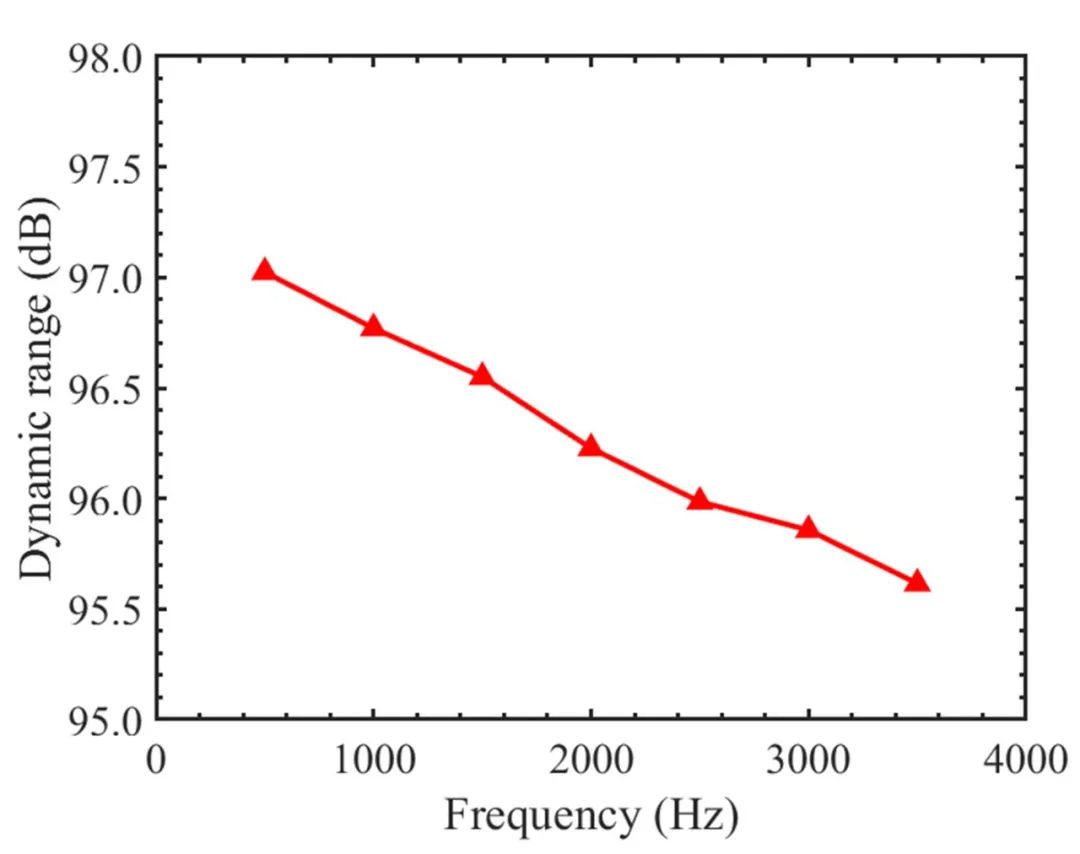
图6 动态测量时的动态范围 图源:Photonics Research(2022)
04 应用与展望
本研究提出一种基于微分Mach-Zehnder干涉仪的FOSRS,通过简单的传感光纤可以实现直接、高分辨率的应变速率传感。在工作频带内,采用12.1 m长传感光纤所研制的FOSRS具有平坦的灵敏度响应、纳米量级的应变速率分辨率、优于95 dB的大动态范围。为了拓展在地壳形变中的长基线测量,采用了25.277 km长的传感光纤研制FOSRS,测试了其10分钟内相位噪声标准差为9.1180×10−5 rad,对应静态分辨率为17.01 pε/s。与表1所列举的DAS相比,FOSRS的应变速率分辨率优于DAS噪声,优于DAS在火山监测和微地震探测中的应变速率测量能力,表明该传感器有潜力应用于地球物理监测和地震事件探测。
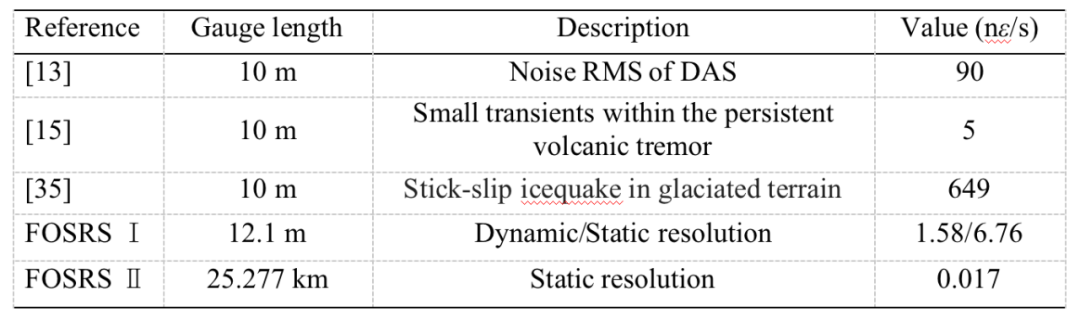
表1 FOSRS和DAS的比较
审核编辑:刘清
-
[VirtualLab] 使用棱镜分束器的Mach-Zehnder干涉仪互补干涉图样的观测2026-04-03 276
-
干涉测量2024-12-26 670
-
基于微分干涉仪的光纤应变速率传感器2023-02-24 2359
-
如何设计马赫泽德干涉仪偏振态控制和拉曼光纤温度传感器2020-03-12 1338
-
干涉型光纤传感器的工作原理是什么?2019-08-30 12157
-
干涉型光纤传感器的正交解调算法分析2018-11-16 2649
-
偏振态调制干涉型光纤传感器2010-12-30 640
-
光纤FP干涉仪的调制原理和算法研究2010-09-14 969
-
干涉型光纤水听器零差解调虚拟仪器实现2009-12-26 879
-
一种新型精密光纤位移传感器2009-07-17 1194
-
一种新型自混合激光干涉光纤应变传感器2009-07-14 1003
-
基于全光纤马赫—曾德尔干涉仪的电流传感研究2009-07-11 1047
-
磁致伸缩效应光纤微分干涉电流传感器2009-07-10 709
-
一种贴装式M ach2Zehnder光纤应变传感器的设计2009-07-09 632
全部0条评论

快来发表一下你的评论吧 !
