

扫地机器人中的光学传感器应用原理
机器人
描述
前几天,我扭伤了背部,只好在地板上睡了几夜。第一天晚上,我被扫地机器人吵醒。不仅噪声,(尽管非常静音),而且它一直在我周围转,撞到我、后退、向左或向右移动几英寸,然后再次尝试绕过我。我不是地板正常布局的一部分。扫地机器人使用光学传感器或摄像头在房间中导航。摄像头导航的扫地机器人不会撞到我,但我得掏一大笔钱。光学传感器导航的扫地机器人取决于防撞条与桌腿或我这样的物体之间的接触。
防撞条与扫地机器人机身之间存在间隙。想象间隙形成的光环。当防撞条碰到桌腿时光环断开,因为防撞条凹陷足以挡住光线。“无光”表示撞到物体。扫地机器人停止工作,转一个角度,然后再次直线清扫。光环的建立采用分立式红外发射器和光电探测器、反射式传感器或集成式数字光传感器,如基于VCNL36687S VCSEL的接近传感器。

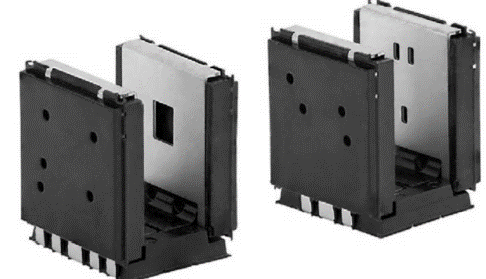
分立式红外发射器和检测器可采用几种可能的配置。单个高功率发射器连接柔性光导管与光导管另一端的光电二极管。这类似光纤电缆,但这种情况下,撞到物体时柔性光导管受到挤压,光线遮断。第二种配置需要将连续防撞条分成几部分。每一部分的红外发射器对准与外圈平行的光电晶体管。当防撞条局部撞到物体时内凹阻断光束,再次造成“无光”的情况。Vishay将这种配置称为透射感测。 两种情况下,光电探测器输出电流,可以放大,由微控制器进行转换和解读。
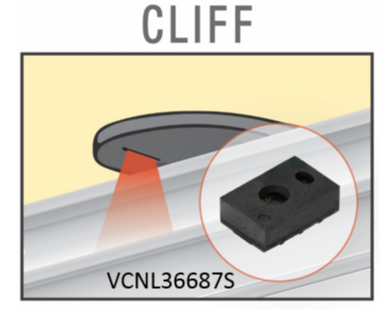
跌落一直是扫地机器人的一大难题。如果有向下延伸的楼梯,就存在跌落的可能。机器人从楼梯上掉下来会受到损坏;因此需要避免跌落。这种情况下可使用数字光接近传感器,传感器朝地面倾斜一定角度,位于机器人前缘。这种接近传感器在单个封装中集成红外发射器、光电二极管和信号处理电路。Vishay VCNL36687S等传感器的输出为0到4095的数字,因为分辨率为12位。沿着地板移动时,发射器将木头、瓷砖或地毯表面反射的光传到光电二极管,传感器读取的是“高”计数,并通过I2C传送到微控制器。当计数降到零时,表示没有地面,机器人停止工作。为减轻机器人的负担,不必持续轮询值,传感器可对设置的阈值做出反应,并通过简单的HIGH / LOW引脚(中断脚)将信息传给微控制器。传感器系统必须足够智能,知道从反射表面到悬空,从木材等反射表面到可吞噬红外光的深色粗毛地毯之间的区别,从而判断前行还是停止。
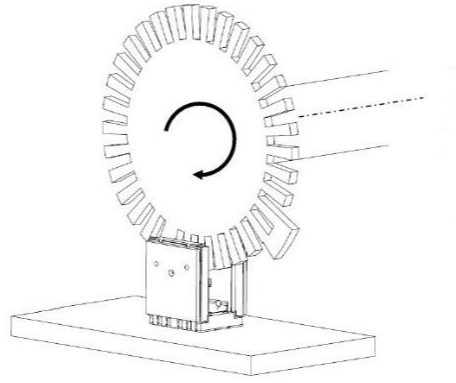
扫地机器人最重要的功能之一是知道行走距离。这也可使用光学传感器、透射传感器或带缝隙的中断器,红外发射器的光穿过码盘间隙传到光电晶体管。这种情况下,透射传感器是单体封装而不是上述分立器件。码盘连接到轮子的驱动轴上,阻断传送到光电晶体管的红外光。它们统称为光学编码器。使用TCUT1630X01之类的3通道透射传感器,机器人可跟踪行进距离、前进后退方向以及必要的转数。
谢天谢地所有这些传感器都使用940 nm红外光。如果是可见光,我就别想睡了。
编辑:黄飞
-
扫地机器人十大排名!了解扫地机器人哪个牌子好2015-01-20 10623
-
扫地机器人如何选购?2015-01-21 7850
-
扫地机器人方案2015-05-18 10615
-
原来扫地机器人是这样工作的!2015-12-24 31560
-
扫地机器人传感器选择,请教大神2016-04-28 10144
-
小米扫地机器人上手:家居能手2016-09-28 8343
-
扫地机器人怎么制作2017-01-12 7848
-
智能扫地机器人解决方案2017-05-27 8801
-
智能扫地机器人用什么马达2018-10-12 7074
-
霍尔传感器在智能扫地机器人中的应用2020-07-01 4653
-
扫地机器人自动回充的技术原理是什么2021-09-14 5593
-
扫地机器人有哪些功能2022-02-07 2000
-
电机驱动的扫地机器人介绍2022-11-09 2604
-
扫地机器人是如何实现液位检测的2023-04-15 2158
-
扫地机器人中的霍尔效应传感器应用说明2024-09-11 658
全部0条评论

快来发表一下你的评论吧 !
