

功率放大器在驱动介电弹性体机器人的应用
电子说
1.4w人已加入
描述
实验名称:功率放大器驱动介电弹性体机器人
研究方向:仿生学
实验内容:通过高压施加在机器人驱动部分,观察机器人在一个电压周期内的运动过程
测试目的:利用介电弹性体驱动器制成可以奔跑的仿生软体机器人
测试设备:信号发生器,功率放大器AigtekATA-7030,介电弹性体机器人,高速运动相机。
实验过程:
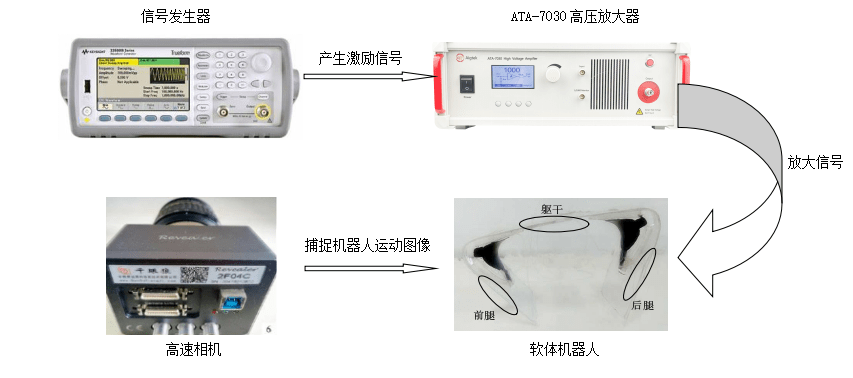
如上图所示为,其中包括一台信号发生器,用以产生频率为3HZ,波形为方波的激励信号;一台高压放大器ATA-7030,接受信号放大为5.5KV的电压,给机器人后退加电,使软体机器人运动,然后用高速相机捕捉机器人运动图像。
实验结果:
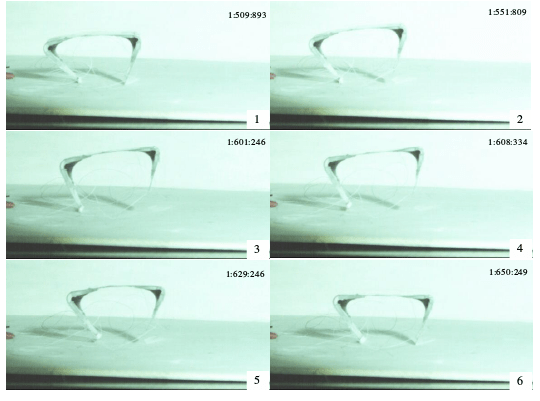
1:机器人初始通电状态,
2:机器人后脚抬起身体上扬,
3:机器人上扬角度达到最高状态,
4:机器人断电起跳,
5:机器人身体腾空,
6:机器人落地。
ATA-7030高压功率放大器参数指标:

审核编辑 黄宇
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
高压放大器如何赋能下一代介电弹性体应用2025-10-27 576
-
ATA-7000系列高压放大器,赋能介电弹性体研究实验新突破!2025-09-06 972
-
高压放大器驱动介电弹性体可以做哪些实验2025-06-20 774
-
看视频答题抽好礼 | 功率放大器应用知多少?线上有奖问答等你来战!2025-05-30 937
-
Aigtek:功率放大器在液晶弹性体上的应用研究2025-03-18 831
-
安泰ATA-7000系列高压放大器在介电弹性体驱动实验中的应用2024-11-11 1099
-
安泰ATA-7030高压放大器在介电弹性体智能材料中的应用2024-09-13 1370
-
安泰功率放大器如何驱动介电弹性体做运动2024-08-25 1037
-
功率放大器经典应用:介电弹性体驱动#功率放大器 #仪器仪表 #介电弹性体.Aigtek安泰电子 2024-06-03
-
高压放大器在介电弹性体折纸术软体机器人中的应用2024-02-27 5492
-
功率放大器在介电弹性体测试中的应用案例2023-11-24 1251
-
功率放大器在液晶弹性体上的应用研究2023-09-08 1141
-
功率放大器在驱动介电弹性体机器人的应用2023-03-07 474
-
高压放大器基于介电弹性体最小能量结构设计应用2021-12-17 831
全部0条评论

快来发表一下你的评论吧 !
