

基于SPAD的高性能3D ToF深度传感器输出亚毫米级精度的点云
描述
特殊的芯片设计让VI4331极大的提高测距精度和探测距离,实现精巧而全面的测量与感知。
搭载高速MIPI接口,拥有全直方图输出的强悍性能,可满足客户多样的场景需求
VI4331实现小体积、大视角、高性价比,为客户提供高性能、低功耗的解决方案。
随着机器视觉、自动驾驶等颠覆性技术的逐步发展,采用3D相机进行物体识别、行为识别、场景建模的相关应用越来越多。先进的3D相机技术使机器人能够“看到”周围的世界,可以说3D相机就是终端和机器人的眼睛。
业界领先dToF芯片设计公司芯视界宣布,推出全新基于单光子探测技术的3D ToF深度传感器—VI4331。该传感器分辨率高达240×96像素,支持水平120˚广视场角,并拥有30fps高帧率,非常适用于扫地机室内建模(SLAM)与避障、行为检测、安检监控等应用。
芯视界研发部首席架构师Ben表示:
随着dToF在消费电子领域的普及,我们认为以SPAD为首的dToF技术路线会成为3D深度传感与机器视觉的主流。
VI4331是集合芯视界在dToF领域多年的改良与创新成果,设计在拓展量程的同时也提升测距精度与支持直方图的功能,为多深度场景环境下的3D建图与定位 (SLAM)提供精确的深度讯息。
高性能、低功耗,新一代VI4331全面升级
VI4331采用特殊芯片结构设计,再加上相应的匹配算法,使其基于上一代产品VI4330性能有显著提升,尤其是在探测距离与测距精度上有了突破性进展,更完美的解决机器人导航,避障等痛点问题。
VI4331通过片上集成电源管理模块、高性能TDC、高速DSP运算模块,可实现23K点的深度点云信息。
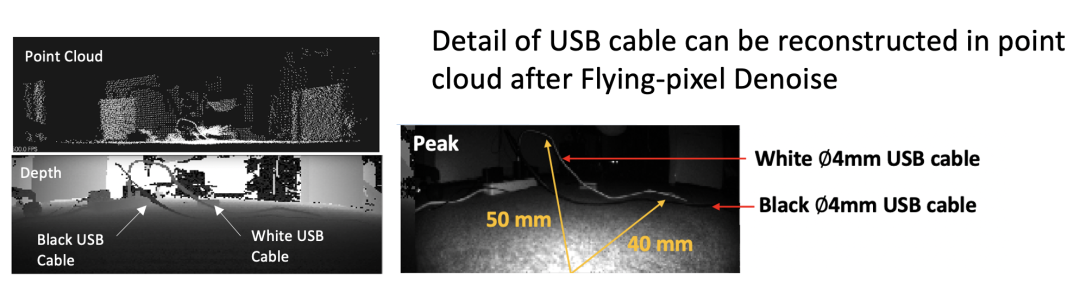
采用芯视界特有Gen2 DSP 深度深度信号处理模块, 可输出亚毫米级精度的深度点云信息。
拥有超强的抗阳光能力,在正常应用场景下的探测距离,可高达到12m。
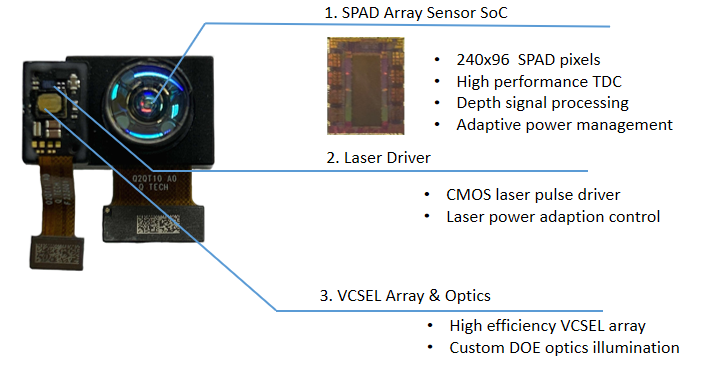
模组说明
更多性能升级
VI4331搭载高速MIPI接口, 可支持30fps的深度影像信息输出。同时拥有全直方图输出功能, 满足客户多样的场景应用需求。
VI4331感光阵列支持一维单向扫描, 芯片搭载4组激光驱动信号,每一组可对应1/4 影像阵列的激光驱动信号。激光驱动信号可与内部传感器扫描时间同步,搭配寻址式激光器,能完美实现固态扫描方案。
应用场景
静态点云效果
人像动态深度效果
日前,芯视界已有合作方案商采用VI4331做出消费级、全固态面阵3D dToF激光雷达产品。
该产品将导航与避障功能合二为一,不仅可以实时输出用于导航定位的3D点云(导航定位帧),最高可达16线,距离可达10米;同时还能输出大分辨率、大视野,用于近距避障的高质量3D点云(避障识别帧),视场角FOV高达H120° x V50°。
审核编辑:刘清
-
iTOF技术,多样化的3D视觉应用2025-09-05 375
-
Voxel 3D 飞行时间传感器机器人视觉参考设计2018-10-11 3089
-
3D ToF怎么引领行业应用浪潮?2019-08-01 2792
-
最受欢迎的三种深度传感器2020-08-25 2015
-
走进飞行时间传感技术揭秘TOF传感器工作原理及应用领域2020-11-14 3735
-
3D传感器有哪些类型2020-12-09 5389
-
氮化铝(AlN)陶瓷电路板技术应用——ToF传感器2021-02-23 915
-
3D-ToF空间深度传感器的工作原理及应用场合介绍2019-04-24 8774
-
3D深度传感ToF技术的基本原理解析2020-04-12 14936
-
ToF 3D图像传感器的特性介绍2021-09-01 2004
-
3D视觉传感器的精度是指什么2022-03-28 3327
-
基于深度学习的3D点云实例分割方法2023-11-13 3959
-
倍加福全新3D视觉传感器的工作原理和典型应用2023-12-08 2566
-
深度解析TMAG5170D-Q1:高精度3D线性霍尔效应传感器的卓越之选2026-02-11 565
-
Himax SLiM™ 3D 结构光深度传感模块:高精度与高性能的完美结合2026-05-16 579
全部0条评论

快来发表一下你的评论吧 !
