

MoveAbsJ指令特点及应用案例分享
电子说
1.4w人已加入
描述
MoveAbsJ:绝对位置运动指令,用于将机械臂和外轴移动至轴位置中指定的绝对位置,数据类型为jointtarget,常用于机器人回原点操作。
MoveAbsJ****指令特点:
²运动过程中不可能存在奇异点;
²不会受到给定工具和工件的影响;
²运动状态完全不可控。
指令代码示例:
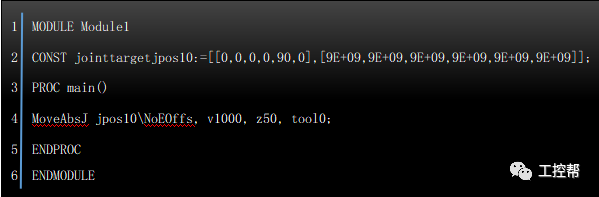
运行以上代码后机器人,5轴为90°,其他轴为0°。
MoveAbsJ****指令应用案例:
1、工作站实训平台案例:一边是码垛平台,一边是轨迹平台,机器人正前方是压铸平台,在编写行码垛和轨迹编程时候,可用MoveAbsJ指令,1轴±90°,5轴90°,采取如上操作,在编程上会带给我们很多便捷。
2、环形入库案例;机器人在环形入仓中,运动范围较大,一般为1轴旋转较大角度,如果单纯通过示教点位数据,这是费时费力的事情,若通过位置变量编程,若直接使用moveJ或moveL,则可能产生碰撞、姿态奇异、机器人报错不能达到指定位置等问题。
在从抓取位置到放置位置过程中,首先根据放置点计算出1轴旋转的角度,可通过MoveAbsJ指令移动到指定的角度,再到放置。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
武汉芯源MCU的指令集架构是什么?有哪些特点?2025-12-08 144
-
PLC指令系统的结构特点是怎样的2021-12-31 1157
-
伪指令有哪几个特点呢2021-12-20 847
-
cisc&risccisc(复杂指令集)有哪些特点呢2021-12-17 1431
-
一文知晓arm指令集特点2021-12-14 1160
-
ARM汇编指令集有哪些?特点是什么?2021-11-30 1585
-
伪指令和指令之间的差别是什么?2021-11-29 1798
-
什么是RISC-V? RISC-V指令具有哪些特点应用?2021-10-14 3140
-
如何使用S7-SCL中的“AT”指令?2021-04-04 13091
-
ARM指令集架构的特点是什么2021-03-03 3828
-
精简指令集的特点_精简指令集有哪些指令2020-08-10 15379
-
Thumb指令的特点及实现2017-10-19 2013
-
微处理器指令集设计2008-10-29 907
全部0条评论

快来发表一下你的评论吧 !
