

MATLAB学习笔记之模糊算法1
电子说
描述
概述
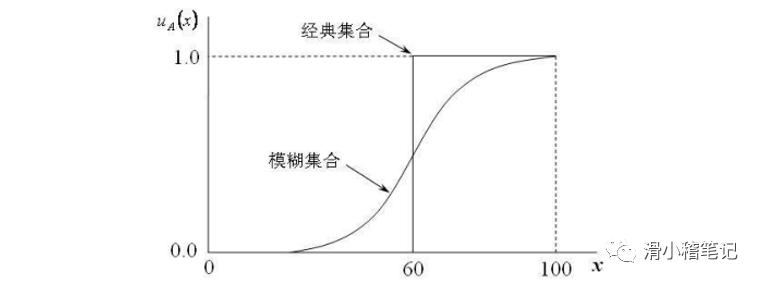
所谓模糊控制,就是对难以用已有规律描述的复杂系统,采用自然语言(如大,中,小)加以描述,借助定性的,不精确的以及模糊的条件语句来表达,模糊控制是一种基于语言的智能控制。
传统的自动控制器的综合设计都要建立在被控对象准确的数学模型(即传递函数模型或状态空间模型)的基础上,但是实际上,很多系统的影响因素很多,通常找出精确的数学模型,这种情况下,模糊控制的诞生就显得意义重大,因为模糊控制不需要建立数学模型,不需要预先知道过程精确的数学模型。模糊控制与传统的PID控制,具有如下优点:
(1)无需知道被控对象的数学模型
(2)反映人类智慧思维的智能控制
(3)易被人们所接受,是一种语言变量控制器
(4)构造容易,从属于智能控制的范畴,尤其适用于非线性,时变,滞后系统的控制
(5)抗干扰能力强,响应速度快,并对系统参数的变化有较强的鲁棒性
1.1.1 工作原理
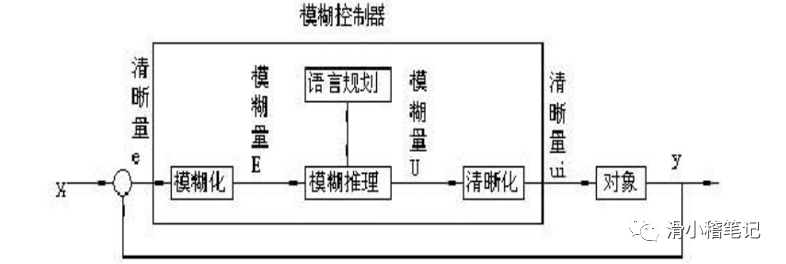
把各种传感器测出的精确量转换为适用于模糊运算的模糊量,然后将这些量在模糊控制器中加以运算,最后再将运算结果中的模糊量转换为精确量,以便对各执行器进行具体的操作控制,这就说明在模糊控制中,存在着一个模糊量与精确量之间相互转化的问题,如下图所示:
模糊控制原理图如下图所示:
1.1.2 模糊语言集
模糊语言集用表示,一般有={负大,负中,负小,零,正小,正中,正大},用模糊语言变量E来描述偏差,或者用符号表示:
负大:Negative Big,简称NB
负中:Negative Medium,简称NM
负小:Negative Small,简称NS
零:Zero,简称ZE
正小:Positive Small,简称PS
正中:Positive Medium,简称PM
正大:Positive Big,简称PB

1.1.3 隶属函数
各参数相对应子集的隶属函数分别由不同的函数族决定,参数的相应子集指该参数被人为地划分成的等级所构成的一组模糊集合,相应子集的多少,由控制精度决定,例如,参数“温差”的相应子集可以是“正大,正中,负小,负大”,也可以是“正大,正中,正小,负小,负中,负大”,后者比前者模糊子集多,所以控制精度更高(在其他相同条件的情况下)。
常用的隶属函数如下所示。
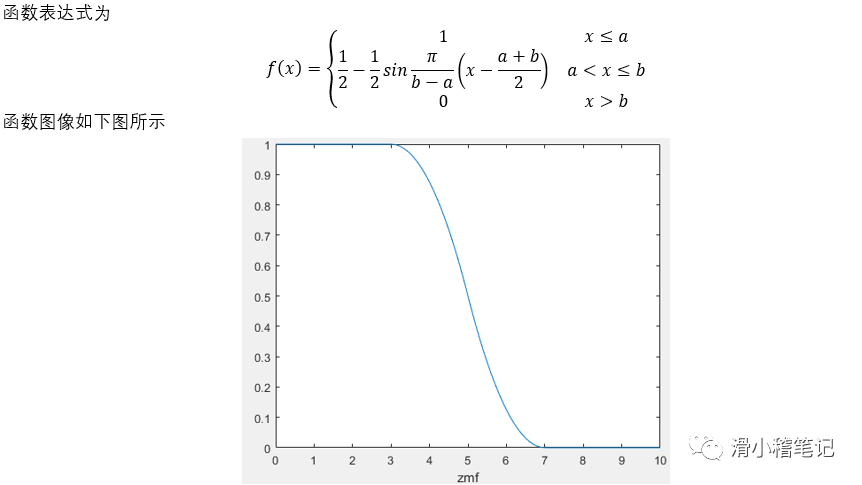
(1)z型隶属度函数zmf
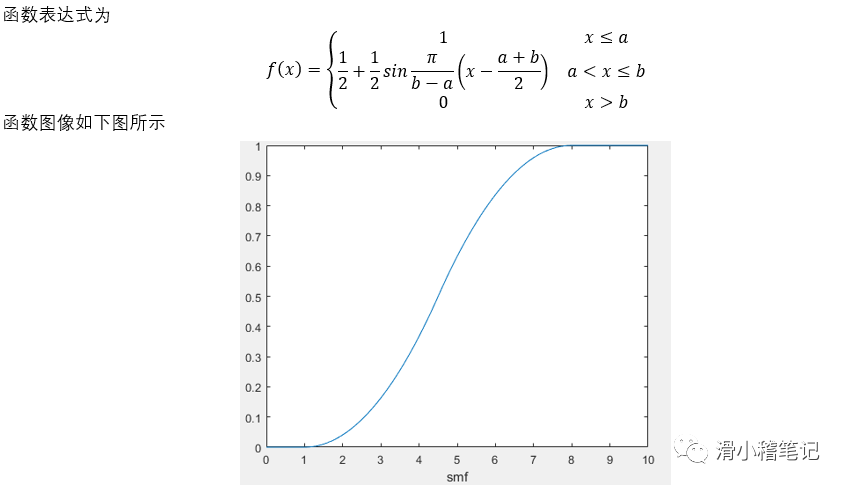
(2)S型隶属度函数smf
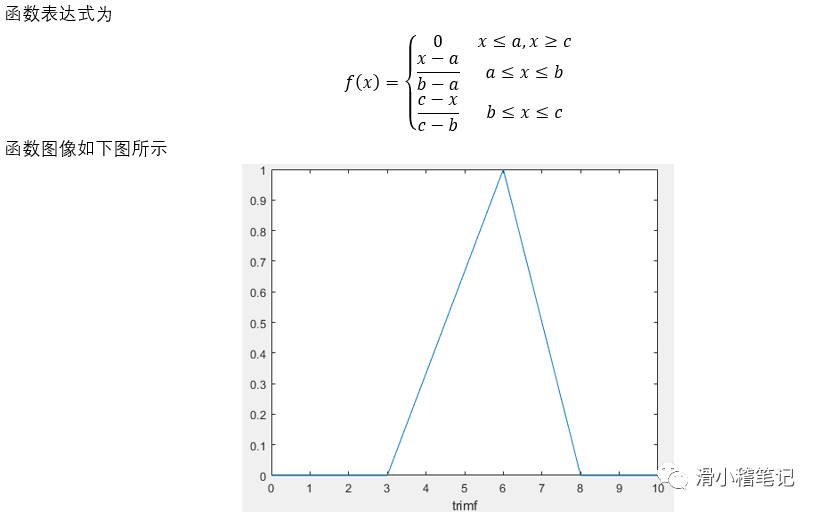
(3)三角形隶属度函数trimf
**1.2 **模糊控制数学基础
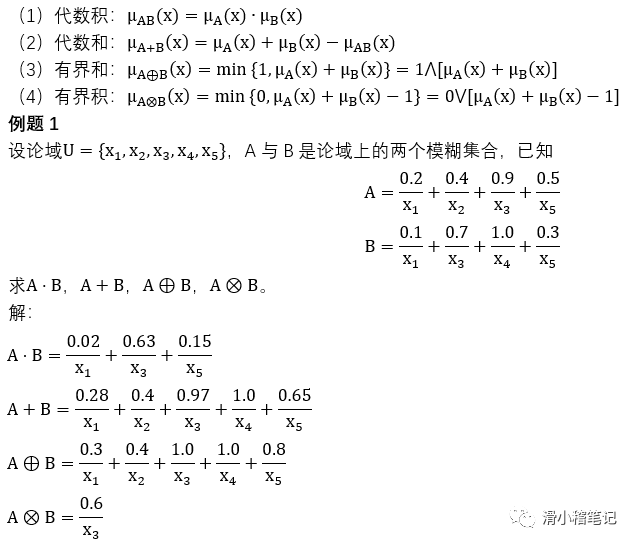
1.2.1 模糊控制集合的代数运算
1.2.2 模糊关系
(1)普通关系:两个集合中的元素之间是否有关联。
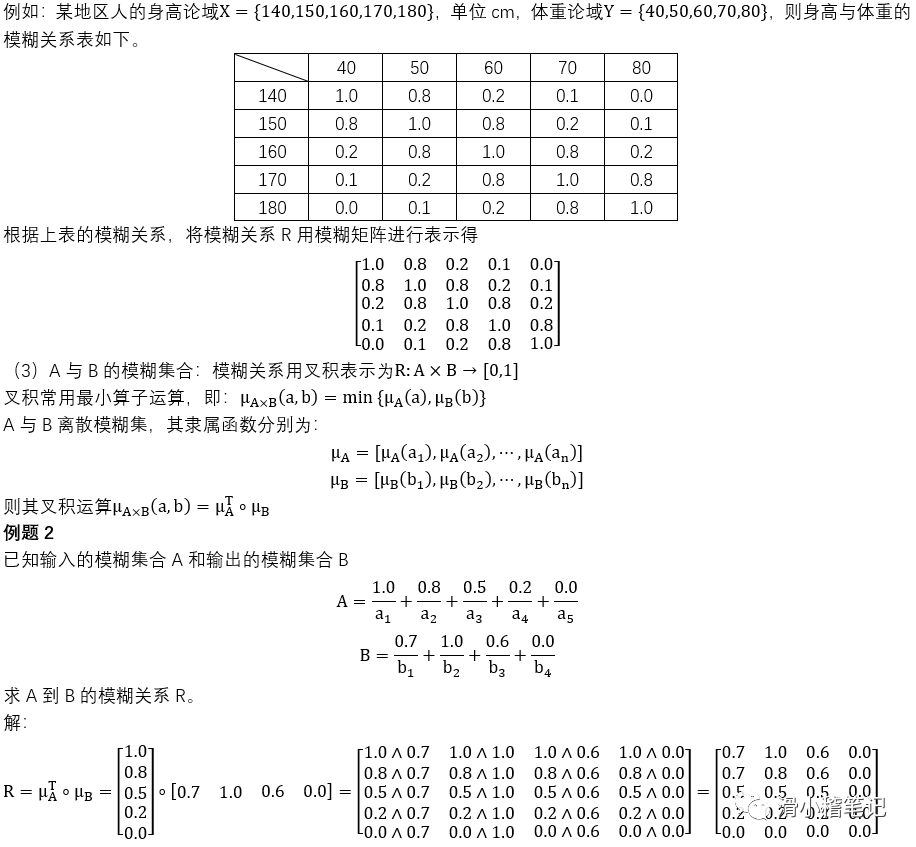
(2)模糊关系:两个模糊集合中的元素之间关联程度的多少。
1.2.3 模糊关系的合成
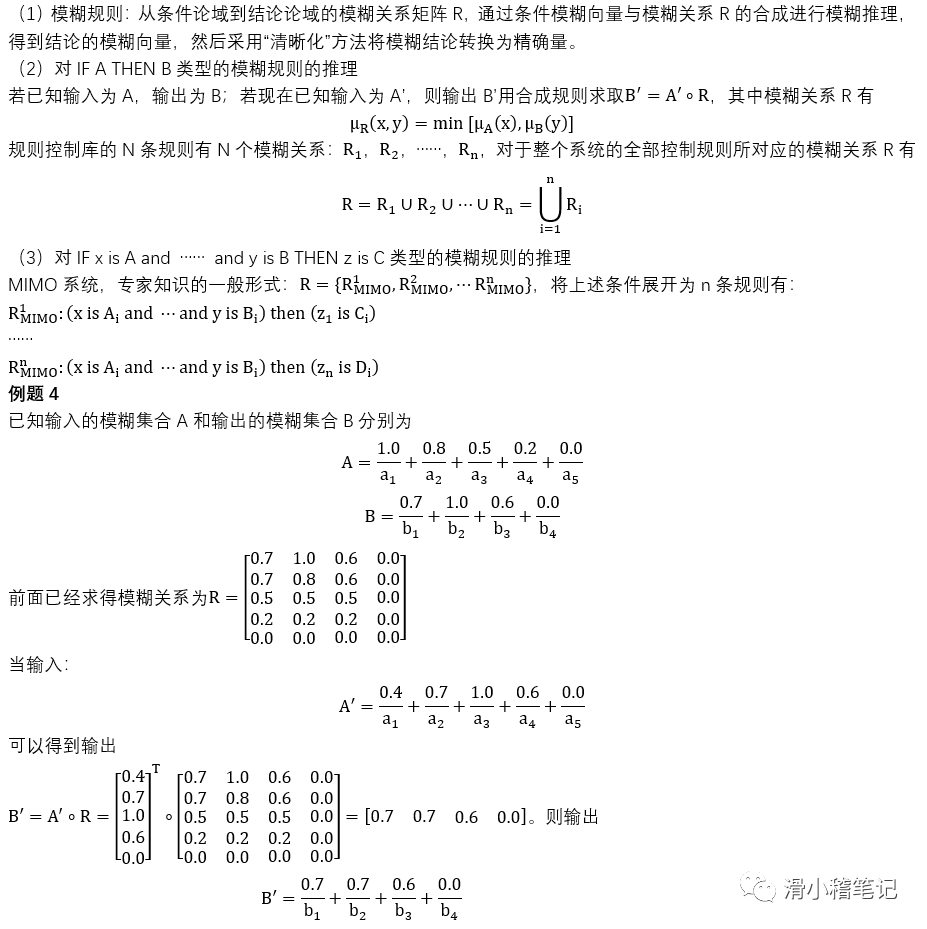
1.2.4 模糊推理
1.2.5 模糊决策
模糊决策(模糊判决,解模糊,清晰化):由模糊推理得到的结论或者操作是一个模糊向量,转化为确定值的过程。
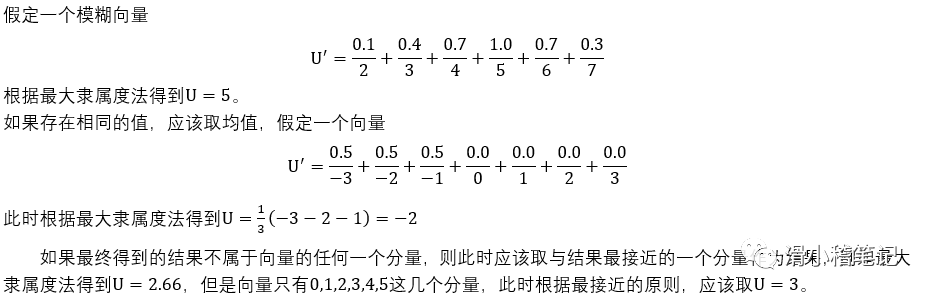
(1)最大隶属度法
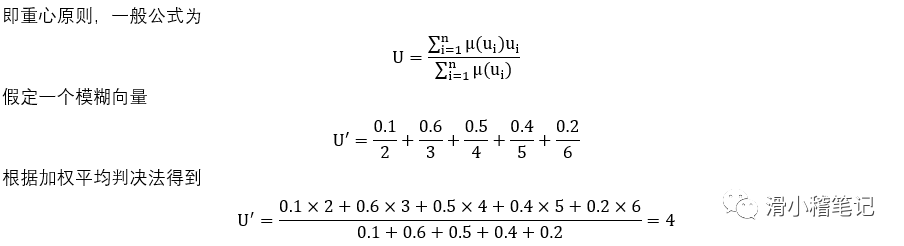
(2)加权平均判决法
(3)中位数法

-
MATLAB学习笔记之模糊算法22023-02-27 2824
-
基于深度学习的图像去模糊算法及应用2022-10-28 4453
-
PID算法学习笔记分享2022-01-14 973
-
求大佬分享MatLab的学习笔记2021-11-19 1367
-
OpenStack之Cinder学习笔记2021-09-23 1007
-
流形学习LLE算法的配套Matlab源码汇总2021-08-25 1061
-
PID算法之模糊PID 精选资料推荐2021-07-19 2184
-
FCM聚类算法以及改进模糊聚类算法用于医学图像分割的matlab源程序2018-05-11 3815
-
基于模糊高斯学习策略的粒子群进化融合算法2017-11-27 824
-
matlab模糊控制工具箱的使用2016-05-04 864
-
模糊推理的Mamdani算法及其Matlab实现2015-11-17 1561
-
模糊PID控制及其MATLAB仿真2015-11-12 1448
-
matlab之dsp学习2013-07-05 9735
全部0条评论

快来发表一下你的评论吧 !
