

速锐得联合宝马供应商提供原厂LED自适应随动大灯升级照明方案
描述
宝马迎来第500万辆国产车型下线,而目前就3系、X3之类的缺少随动转向功能,而要达到宝马7系类的自适应随动,无疑是需要更多的大米。在这个市场里,大多数的宝马车主,知道,但是提起就会比较少,因为宝马7系到3系之间的差异,确实有点大,而5系也要顶配才有,目前买宝马5系顶配的,还不到8%。
为了更好的照明体验,低配升级高配,而又不需要花很多钱,那么无疑,加装的原厂LED自适应随动大灯升级照明方案更贴近我们的客户。
在高配车上,自适应随动大灯的功能主要由脚部空间模块(FRM)负责。因此自适应随动大灯的全部软件都位于FRM内,FRM通过LIN总线连接与大灯驱动模块通信,FRM会根据不同的当前大灯状态信息,通过LIN总线将所需请求信息发送给前灯驱动模块,进而控制自适应随动大灯的工作状态。
底层的CAN数据,中国的宝马是不配拥有的,这些数据基本都在德国慕尼黑。如果要拿到底层的CAN矩阵协议授权,现在,摆在面前,有两个途径:一是去慕尼黑老大那里,通过商务谈判和技术授权获得CAN矩阵;二是由12年深耕CAN总线数据的速锐得基于CAN总线应用适配出来。很明显,99%的客户选择了第二种方案,因为国内的经销商集团,不太愿意支付这种谈判的筹码,即便愿意,也耗不起这个时间。
那么速锐得的主要项目任务,第一步就是解码这些模块里的CAN数据和LIN数据。其一,涉及大灯开启状态、点火状态、CAN总线唤醒状态需要,配合大灯组工作及测试;其二,由ECU控制单元到LIN总线的控制下发指令,需要做到完美兼容,避免报故障码或者无法控制亮灯。为此,在汽车点火状态下,还需要采集各种灯光状态下,下发控制CAN或者LIN总线报文,比如远光灯、近光灯、转向灯、双闪灯的状态。
经过时间的滴答和技术员的的吭哧破解,我们就已经拿到了部分数据,原厂电路图,还有就是12年来能趴在车底坚持的精神,以及对汽车平台、电子控制单元、硬件、软件、通信协议、报文分析的理解,以及汽车内部算法逻辑的经验掌握,获得成果如下:
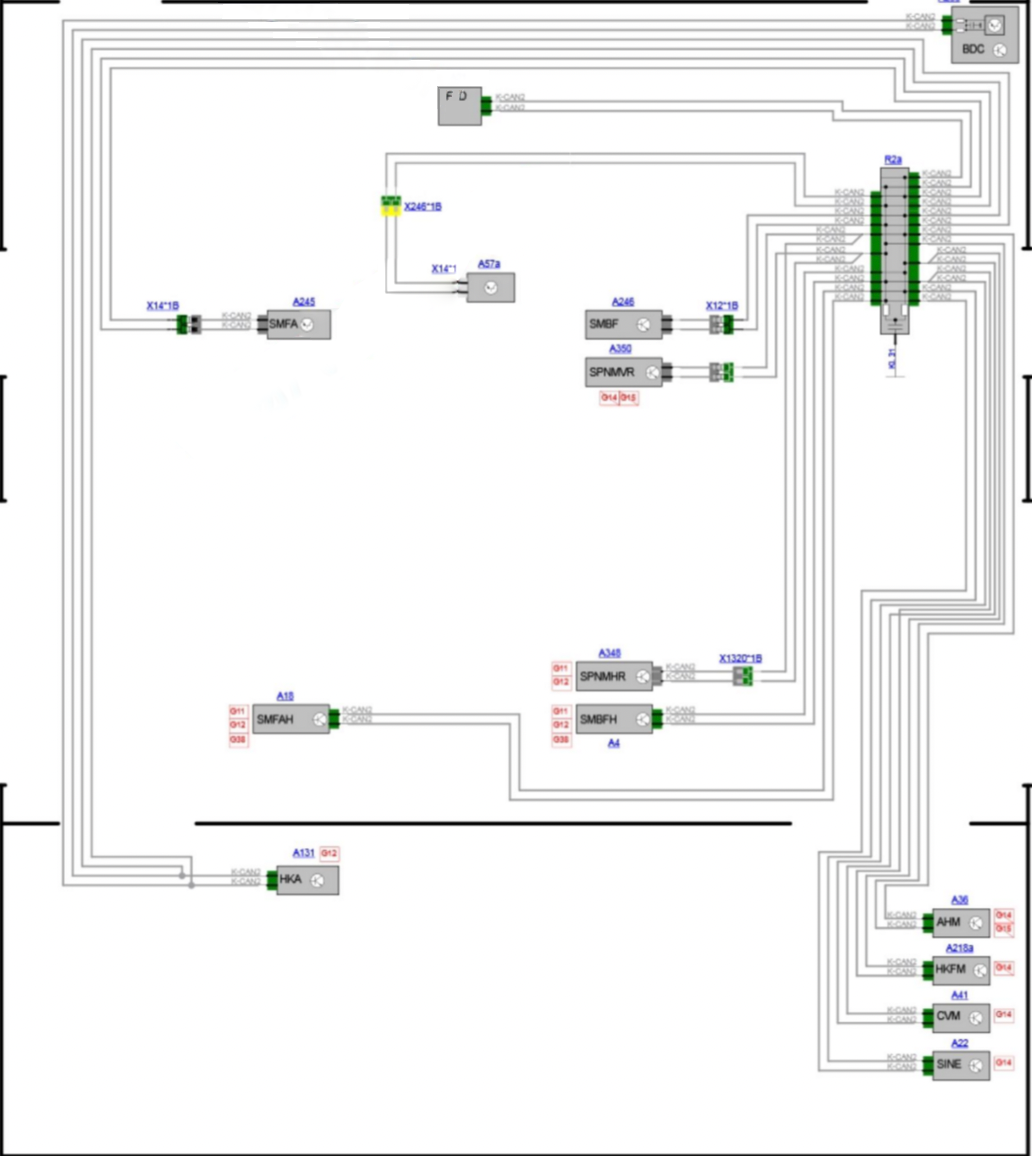
宝马CAN总线电路图K-CAN
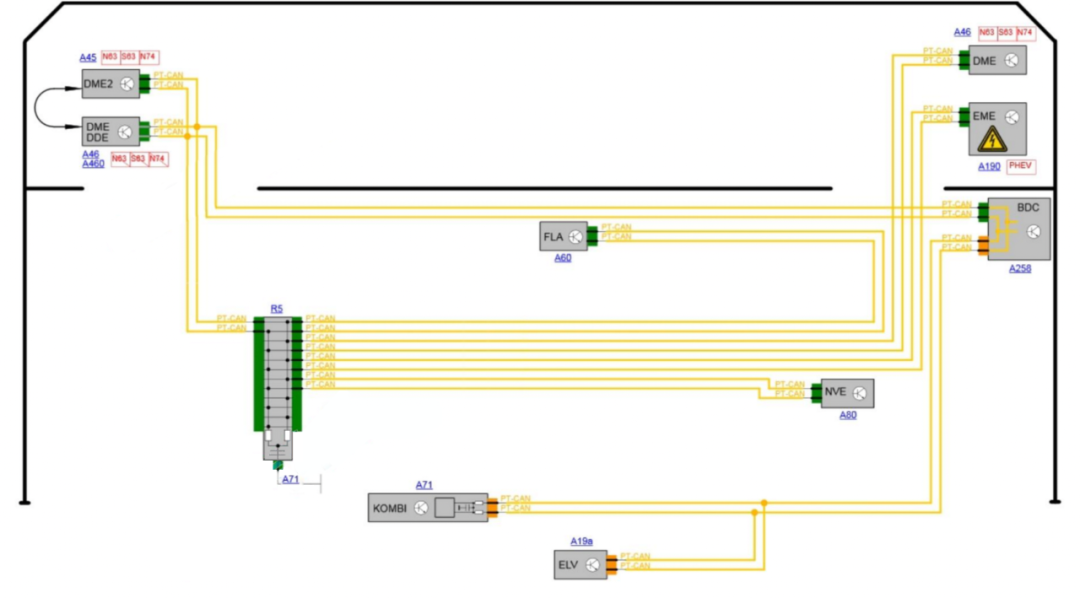
宝马CAN总线电路图PT-CAN
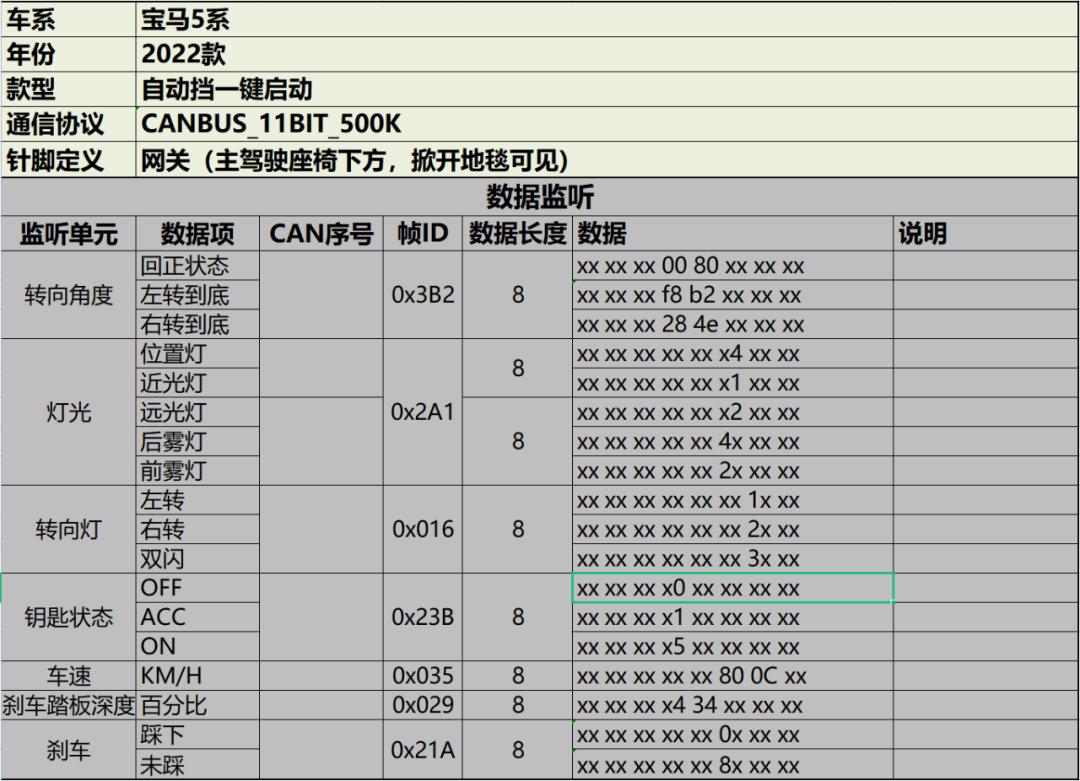
宝马CAN报文结构
拿到了底层的数据,基本上,后续的应用开发就是软硬件配合的测试了,具有随动照明功能的双氙气大灯绝对是尖端大灯照明技术,我们还将在未来几年内搞定ADB矩阵大灯。

自适应随动控制大灯能够不断对大灯进行动态调节,保持与汽车的当前行驶方向一致,以确保对前方道路提供最佳照明并对驾驶员提供最佳可见度,从而显著增强了黑暗中驾驶的安全性,这在转向时更具优势,即便是晚上的狂飙中有田,也不会紧张了。
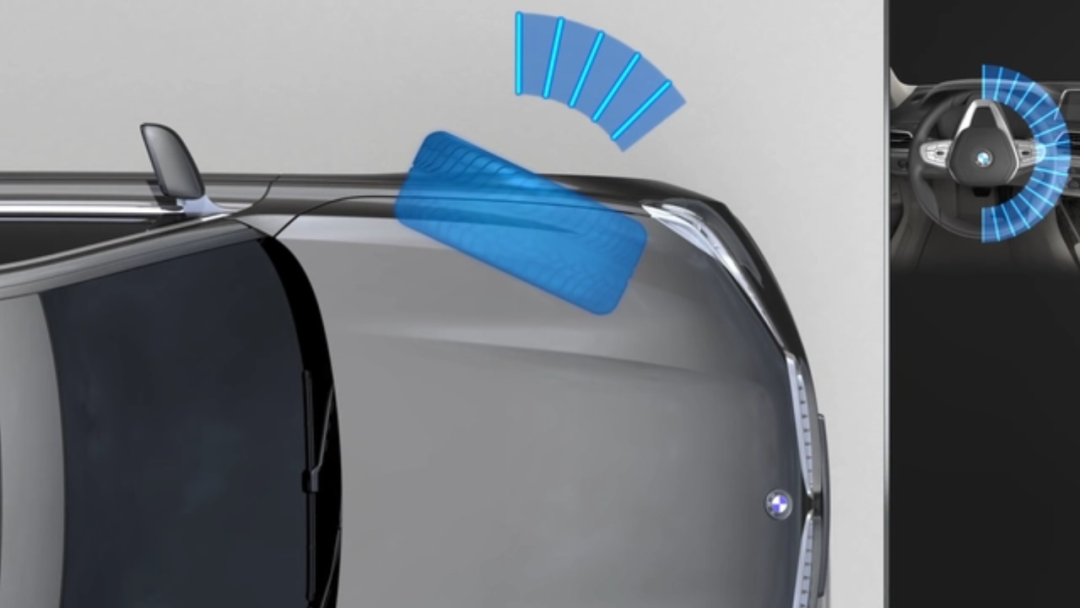
转向时静态大灯限制了驾驶者的视野,因此常常会产生“黑洞”,而随动控制大灯能够动态跟踪前方路况,像魔杖一样引导驾驶者在弯道上行驶。按我们理解来说,这个“魔杖”是一种紧密的联网协作安全系统,它能够不断调节大灯,适应当前的方向盘转向角,在汽车方向盘角度、车辆偏转率和行驶速度的控制下,双氙气大灯像眼睛一样自动移动到正确的方向来照亮前方道路。
当然,如果你是宝马X5高配、5系顶配、7系、X6、X7以上的车主,恭喜你!这套方案,向下可以兼容到3系,最近出的1系、2系列、只是没有客户去投入开模具罢了,市场表现确实不太友好,如果你感兴趣,愿意掏个百来万开一套大灯总成,我们也愿意和你配合!
审核编辑 :李倩
-
擎耀解码智能汽车LED大灯总成ASF随动转向原理及技术落地方案2024-12-17 1408
-
速锐得解码奔驰基于底层CAN总线数据随动转向大灯照明系统2023-03-16 1577
-
速锐得联合宝马供应商提供原厂LED自适应随动大灯升级照明方案2023-02-21 1659
-
速锐得原厂CAN协议实现丰田照明系统总成升级实现随动转向方案2023-02-16 1468
-
速锐得解码比亚迪唐车灯升级改装技术方案CAN图纸2022-11-30 2217
-
安森美半导体汽车LED照明创新方案2019-07-25 2518
-
欧宝车型配备全新研制自适应LED大灯2018-04-10 508
-
互联网时代,我选择海淘速改LED大灯!2017-05-05 3078
-
为了安全,我选择速改LED大灯!2017-03-29 3281
-
寻LED电源IC和单片机IC供应商(能提供方案)2013-08-26 3717
-
LED驱动方案供应商大pk!2013-01-10 11911
全部0条评论

快来发表一下你的评论吧 !
