

两相双极性步进电机的工作原理及仿真
工业控制
1285人已加入
描述
有幸能从报废的机器的光驱中拆除几个电机,大概是像下方图片中那样的。 但是这个电机只有四根外接的引脚,之前对不仅电机不是很懂,这两天通过查阅资料,了解到这个电机被称为两相双极性步进电机。
在此大概叙述下两相双极性电机的工作原理。 如下图所示,步进电机只有两相(即两组定子),双极性代表两个定子缠绕的线圈可以两个方向通电。
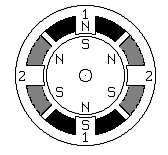
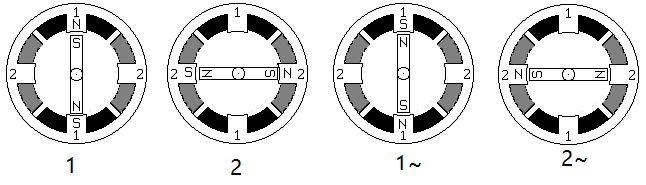
简单用图片表示下90度两相双极性步进电机转一圈的过程。 1表示相1正向通电,1~表示相1方向通电。
上面只是简单叙述了下两相双极性步进电机的工作原理,下面进入正题,使用proteus进行仿真Arduino来控制电机。
仿真:使用L298(U3)驱动四线两相双极性步进电机。
代码:MotorTwo为两相双极性电机驱动。
/* Main.ino file generated by New Project wizard
*
* Created: Thu Sep 5 2013
* Processor: ATmega328P
* Compiler: Arduino AVR
*/
#define LED ( 13 )
#define MOTOR_PIN0 ( 0 )
#define MOTOR_PIN1 ( 1 )
#define MOTOR_PIN2 ( 2 )
#define MOTOR_PIN3 ( 3 )
#define MOTOR_PIN4 ( 4 )
#define MOTOR_PIN5 ( 5 )
#define MOTOR_PIN6 ( 6 )
#define MOTOR_PIN7 ( 7 )
#define MOTOR_ENA ( 8 )
#define MOTOR_ENB ( 9 )
void setup()
{ // put your setup code here, to run once:
pinMode( LED, OUTPUT );
pinMode( MOTOR_PIN0, OUTPUT );
pinMode( MOTOR_PIN1, OUTPUT );
pinMode( MOTOR_PIN2, OUTPUT );
pinMode( MOTOR_PIN3, OUTPUT );
pinMode( MOTOR_PIN4, OUTPUT );
pinMode( MOTOR_PIN5, OUTPUT );
pinMode( MOTOR_PIN6, OUTPUT );
pinMode( MOTOR_PIN7, OUTPUT );
pinMode( MOTOR_ENA, OUTPUT );
pinMode( MOTOR_ENB, OUTPUT );
}
void MotorOne()
{
static int i = 3;
switch( i-- )
{
case 0:
digitalWrite( MOTOR_PIN0, HIGH );
digitalWrite( MOTOR_PIN1, LOW );
digitalWrite( MOTOR_PIN2, LOW );
digitalWrite( MOTOR_PIN3, LOW );
break;
case 1:
digitalWrite( MOTOR_PIN0, LOW );
digitalWrite( MOTOR_PIN1, HIGH );
digitalWrite( MOTOR_PIN2, LOW );
digitalWrite( MOTOR_PIN3, LOW );
break;
case 2:
digitalWrite( MOTOR_PIN0, LOW );
digitalWrite( MOTOR_PIN1, LOW );
digitalWrite( MOTOR_PIN2, HIGH );
digitalWrite( MOTOR_PIN3, LOW );
break;
case 3:
digitalWrite( MOTOR_PIN0, LOW );
digitalWrite( MOTOR_PIN1, LOW );
digitalWrite( MOTOR_PIN2, LOW );
digitalWrite( MOTOR_PIN3, HIGH );
break;
default:
break;
}
if( 0 > i )
i = 3;
}
void LedLight()
{
static int i = 0;
if( 0 == i++ )
digitalWrite( LED, HIGH );
else
digitalWrite( LED, LOW );
if( 2 <= i )
i = 0;
}
void MotorTwo()
{
static int i = 0;
switch( i++ )
{
case 0:
digitalWrite( MOTOR_PIN4, HIGH );
digitalWrite( MOTOR_PIN5, LOW );
digitalWrite( MOTOR_PIN6, LOW );
digitalWrite( MOTOR_PIN7, LOW );
break;
case 1:
digitalWrite( MOTOR_PIN4, LOW );
digitalWrite( MOTOR_PIN5, HIGH );
digitalWrite( MOTOR_PIN6, LOW );
digitalWrite( MOTOR_PIN7, LOW );
break;
case 2:
digitalWrite( MOTOR_PIN4, LOW );
digitalWrite( MOTOR_PIN5, LOW );
digitalWrite( MOTOR_PIN6, HIGH );
digitalWrite( MOTOR_PIN7, LOW );
break;
case 3:
digitalWrite( MOTOR_PIN4, LOW );
digitalWrite( MOTOR_PIN5, LOW );
digitalWrite( MOTOR_PIN6, LOW );
digitalWrite( MOTOR_PIN7, HIGH );
break;
default:
break;
}
if( 4 <= i )
i = 0;
}
void loop()
{ // put your main code here, to run repeatedly:
MotorOne();
LedLight();
MotorTwo();
delay(500);
}
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
双极性步进电机的基本组件有哪些2023-08-21 2201
-
两相步进电机和配套的两相步进电机驱动器比较2023-03-13 1387
-
步进电机的基本工作原理2023-02-24 6353
-
两相步进电机的工作原理2021-07-20 12509
-
两相四线制步进电机驱动的原理是什么?2021-07-08 6169
-
步进电机定子相数:单相/两相/三相/四相/五相结构工作原理 相关资料推荐2021-07-06 2440
-
两相步进电机的双极连接和单极连接2021-06-12 3623
-
基于双极性桥式电路的两相制步进电机驱动器设计2010-12-15 5152
-
基于FPGA的两相步进电机细分驱动电路设计2010-05-11 901
-
两相步进电机控制设计2009-12-16 15942
-
双极性桥式电路的两相制步进电机驱动器设计介绍2009-04-02 568
全部0条评论

快来发表一下你的评论吧 !
