

PLC编程传送带驱动的问题
工业控制
1285人已加入
描述
首先要理解PLC编程没有标准的答案,面对的都是具体的要求,或者给你提出一些具体的条件。在满足具体的需求的情况下,内部的程式可能是各不相同的,每个人可能都有自己的逻辑,但容错率,简洁程度等有一定的差异性。
这次带来的是一个传送带驱动的问题。
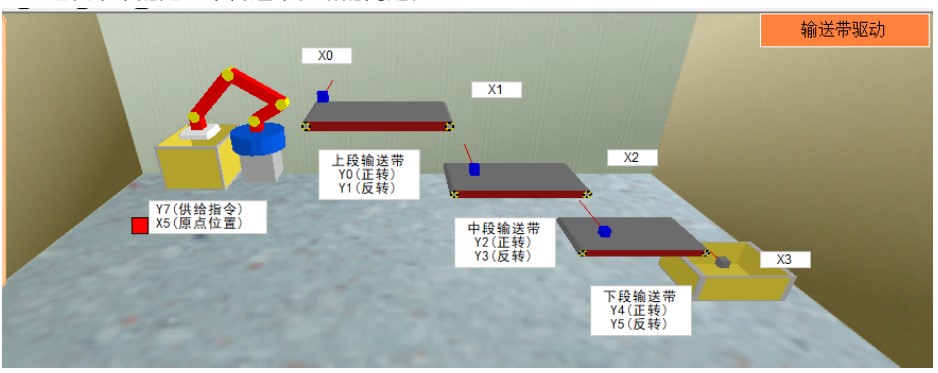
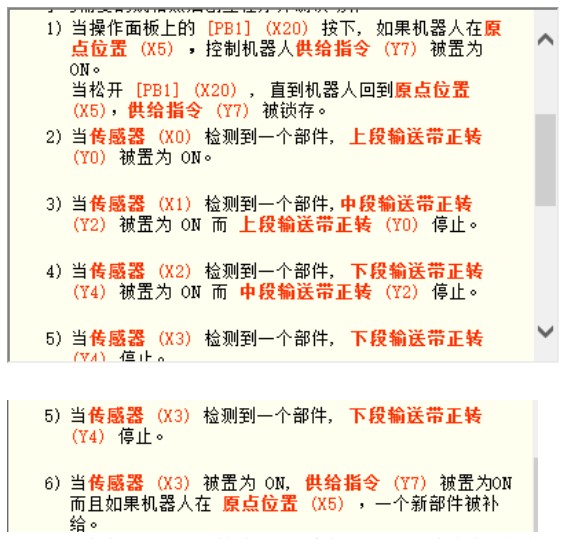
面对这个题目,首先要明确机器人Y7动作相关的要求有哪些。FB1,X5,X3都是相关条件,除此以外还需要使用寄存器M。因为机器人的供给指令只需要动作一次。传送带只会在上面有货物的时候动作,每当传送到下一个的时候,上一个就会停止。
直到传送到X3传感器所在位置。X3动作,上一个传送带停止,同时供给指令Y7动作。
由于在三菱PLC仿真教学软件中界面较小,将结果放在GX Works2中。
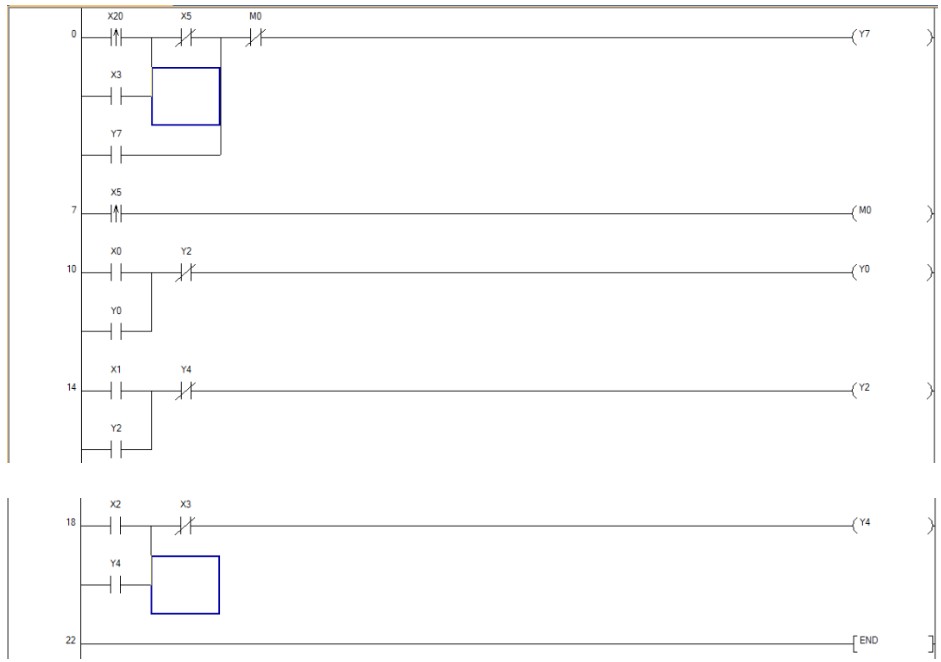
在这里用到了上升沿指令:定位元件的上升沿(由OFF→ON)时接通一个扫描周期。M0寄存器指令。X5复位上升沿指令可以使X0,X1,X2,X3复位。
下面三个是皮带Y0,Y2,Y4自锁指令,皮带对应传感器接收信号后皮带自锁转动,输送到下一个皮带后触发传感器,皮带动作,皮带的动作与上一个皮带动作互锁。上一个皮带停止转动。
直到X3传感器动作触发Y4停止动作。并且X3触发供给指令Y7,手臂进行下一次送货(这里置考虑手臂一次供货到底的情况,如果需要连续送货还需要另外一个程序)。
审核编辑:刘清
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
#电工 传送带模块jf_09391732 2023-02-18
-
如何用Labview做传送带动画2014-06-05 4733
-
怎样去设计基于单片机的传送带计数系统2021-11-25 1015
-
如何实现单片机货物传送带检测设计2022-01-19 1128
-
关于PLC编程传送带驱动的问题解析2023-03-10 1409
-
海为C60S2R在同步传送带中的应用2017-10-05 726
-
这才是真正意义上的万向传送带:万向传送带FESTO 2D MOVE演示2017-12-13 11833
-
通过YMD系列超级节能变频器实现传送带的节能设计2018-10-25 3574
-
Haiwell海为PLC在同步传送带中的应用2018-11-21 996
-
橡胶传送带破损划伤可以修复再使用吗2021-03-23 1524
-
矿山传送带导向辊轴承位磨损的修复指南2022-09-23 617
-
西门子1200PLC 传送带控制程序编写及思路2023-03-30 6752
-
STL检测传送带传送方向的示例2023-08-12 2090
-
博途:使用STL函数控制传送带2023-10-12 4116
-
英国真尚有非接触测速传感器LP-DS100传送带速度测量2025-02-26 1031
全部0条评论

快来发表一下你的评论吧 !
