

介绍几种常用的PLC控制电路
工业控制
描述
本节介绍几种常用的PLC控制电路,并与继电器接触器控制电路相对照,使读者在掌握了继电控制系统的基础上,全面地了解PLC的控制原理和应用技术。
电动机的启停控制
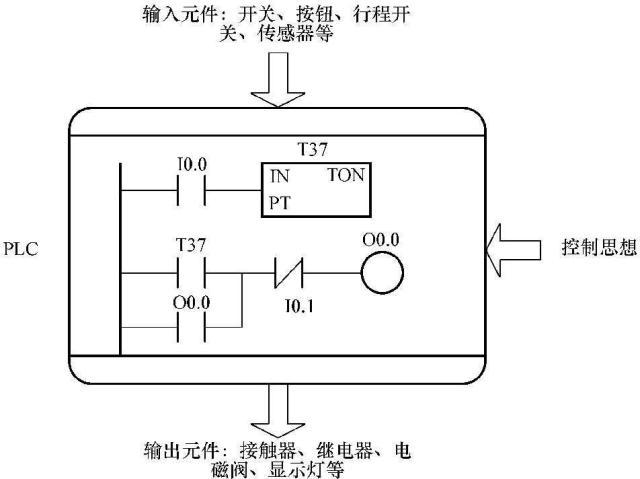
图5-50 PLC控制系统的组成
PLC控制系统由硬件和软件两部分组成,如图5-50所示。 硬件部分:将输入元件通过输入点与PLC连接,输出元件通过输出点与PLC连接,构成PLC控制系统的硬件部分。 软件部分:用PLC指令将控制思想转变为PLC可以接受的程序。
启动控制:通常使用按钮来实现,将其动合触点接到PLC的输入点,PLC输入映像寄存器中的对应位与该触点形成映射关系,用数字量“1”和“0”反映触点的接通和闭合状态,如图5-51所示。 电动机先连接接触器,接触器的主触点接到PLC的输出点,PLC中有一个输出映像寄存器与各输出点形成一一对应的映射关系。
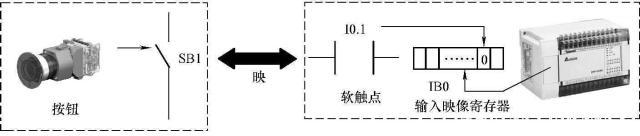
图5-51 按钮与输入映像寄存器的映射
通常的启动控制,只需将启动按钮接在PLC的输入点,电动机接到PLC的输出点即可实现。 图5-53的梯形图,电路功能单一,不能自锁,只能实现简单的点动功能。 与继电控制图5-52(b)实现的功能相同。 图5-54梯形图,使用输出线圈的辅助触点(软触点)与按钮映射触点(软触点)并联,称为自锁。 将简单的启动电路增加了自锁功能,这样手离开按钮后,电动机可以继续运行。 与继电控制图5-52(c)实现的功能相同。 图5-55梯形图,使用按钮的动断触点接到PLC的输入点,在梯形图中起到切断主干通道控制信号的作用,因此,按钮的动断触点串联在被控线圈的主通道上。 图中增加了停止按钮,使其具备启动保持停止的功能。 与继电控制图5-52(d)实现的功能相同。 读者将两种控制装置对照比较,便可以了解PLC软硬件以及如何利用梯形图来实现控制的功能。
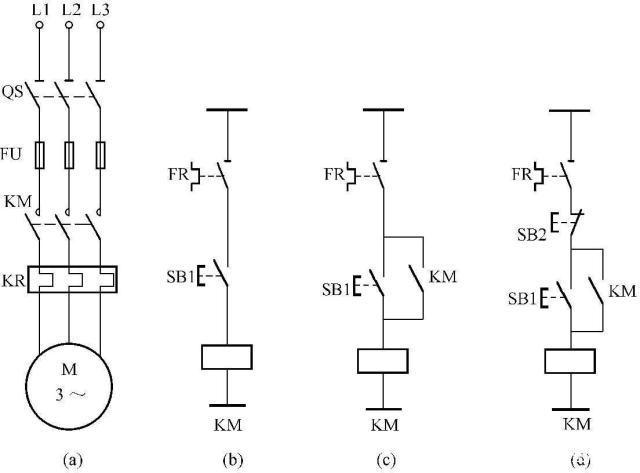
图5-52 电动机继电控制的启停电路
(a)主电路; (b)点动控制; (c)带自锁的点动控制; (d)典型的启停控制
图5-55电路中包含了启动、保持和停止控制,是最典型的启保停控制电路,读图时将三个梯形图对应分析。 在实际电路中还需加上一些保护措施,如互锁保护、过载保护等,梯形图相对复杂些。 梯形图实现的电动机启停控制与继电器接触器控制系统功能相同,梯形图表达得更简练、直观。
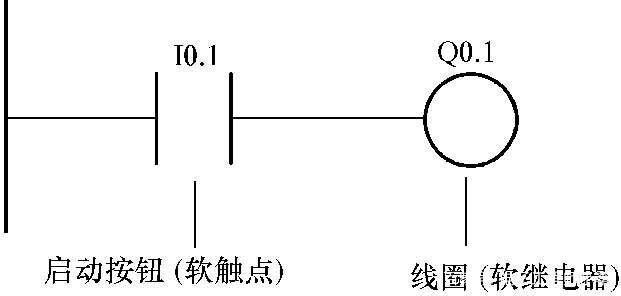
图5-53 最简单电动机启动程序
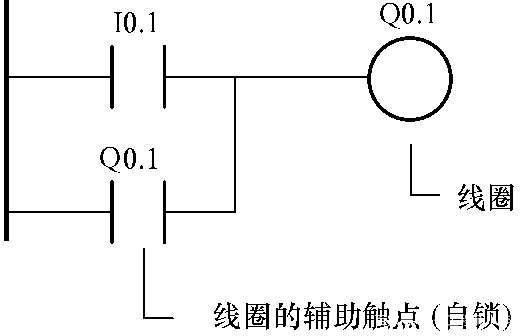
图5-54 带自锁触点启动程序
电动机正反转控制
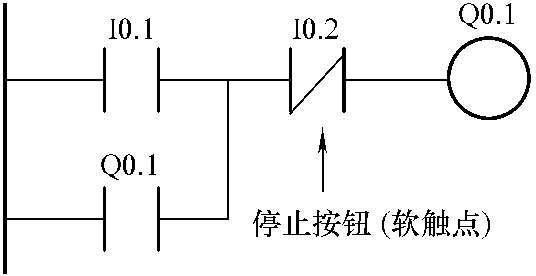
图5-55 带停止按钮的电动机启动程序
前面已经介绍了利用继电控制系统实现电动机的正反转控制。 要实现三相电动机正反转,只需将接入电动机的三相中任意交换其中两相,如图5-56所示。 梯形图在启保停电路的基础上,为了防止电动机正反转同时接通而烧毁电动机线圈,加入互锁保护,从而构成了简单的正反转控制程序,如图5-57所示。 在实际电路中,通常使用按钮、行程开关和传感器等发出的控制信号作为正反转切换的输入信号。
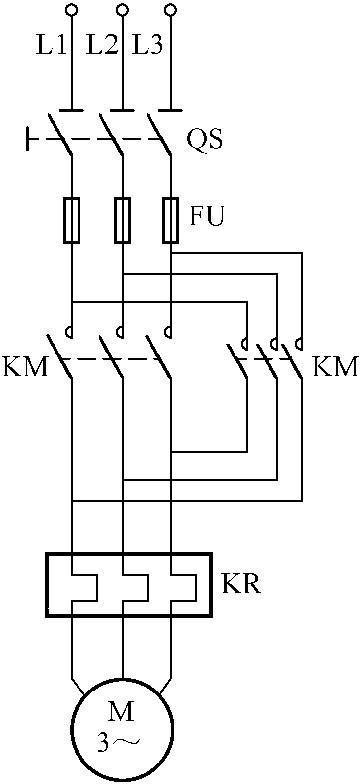
图5-56 正/反转控制电路
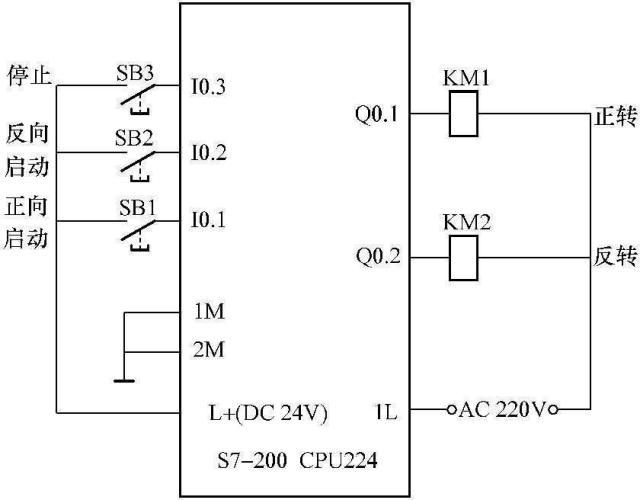
图5-57 输入/输出配置及外部接线图
实现电动机正反向启动控制。 按下SB1,电动机正向启动(保持运行状态); 按下SB2,电动机反向运行,按下SB3,电动机停止。
(1)要实现正反转,需要使用两个接触器KM1、KM2。 对应PLC输入点可选Q0.1、Q0.2。
(2)因为正反转电路中,若同时接通会造成短路,因此每次只能接通其一。 一种方法可以使用带互锁的按钮,另一种方法可以将接触器的动断辅助触点接到对方电路中。 本例中采用双重互锁,为保持某一方向的运行状态,应使用自锁触点。
(3)不可能让电动机无休止地运行下去,因此将停止按钮的动断触点串联在对应的电路中。
根据输入输出点数分配I/O地址,见表5-8。
表5-8 I/O地址分配表

根据PLC上对应的I/O点进行连线,按S7-200的说明书将电源线接好,示意图如图5-57所示。 由于PLC的输出往往是强电,所以操作时一定要遵守安全操作规程,检验没问题的情况下才可以通电调试。
进入Step7 MicroWin32开发环境设计梯形图程序,如图5-58所示。 其动作原理的分析与继电器控制相同。
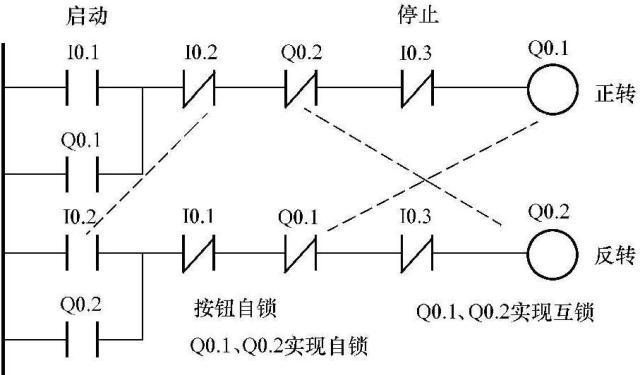
图5-58 电动机正反转控制梯形图
Y-△减压启动
星形三角形减压启动能大大减少启动电流,减少电流冲击和延长电动机使用寿命,在轻载或空载的启动电路中得到广泛应用。 图5-59为Y-△减压启动控制电路图。 前面已讲过Y-△启动控制电路图,虽然作用雷同,但实现的线路有所不同,读者可比较分析。
图5-59星形三角形减压启动控制系统。 控制过程:按下SB2电动机星形启动,延时3s切换至三角形运行状态,按下SB1,系统停止运行。
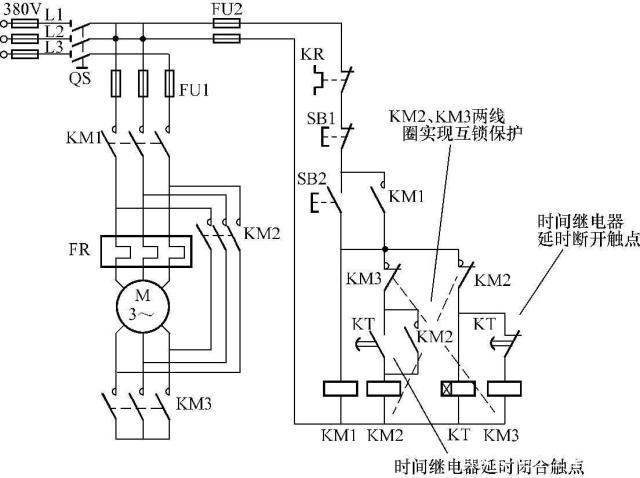
图5-59 Y-△减压启动控制电路
继电控制系统的控制过程如下。
(1)电动机星形连接时,三相绕组线圈的一端连在一起,三角形连接时,三相绕组线圈的头尾分别相连。 要实现这两种状态的切换,需用3个接触器KM1、KM2、KM3,连接方式如图5-59所示。
(2)KM1、KM3通电,KM2断开时,电动机星形连接。
(3)KM1、KM2通电,KM3断开时,电动机为三角形连接。
为防止切换到三角形连接时KM3不能及时断开而产生短路,在KM2和KM3之间建立互锁保护。
SB1为停止按钮,串联在能够切断整个控制电路的地方。
依据上述电路的工作过程,根据所需元件,设置I/O地址,其分配I/O地址见表5-9。 将其继电控制系统转化为PLC编程控制系统。 读者可根据其设计的思路来分析,依据分析继电控制原理的方式设计PLC的梯形图。

表5-9 Y-△减压启动I/O地址
根据传统继电控制电路图,将其转化成PLC的梯形图,如图5-60所示。 读者首先要明确 Y-△减压启动I/O地址以及所用软继电器的作用,PLC的书写规则。 识图时采用顺藤摸瓜的方法,沿着继电器控制电路的每一支路上的输入输出元件,在PLC控制程序梯形图中用对应的指令取代,再对其位置依据符合PLC书写规则分析即可。 Y-△减压启动梯形图中用定时器代替了继电控制中的时间继电器。
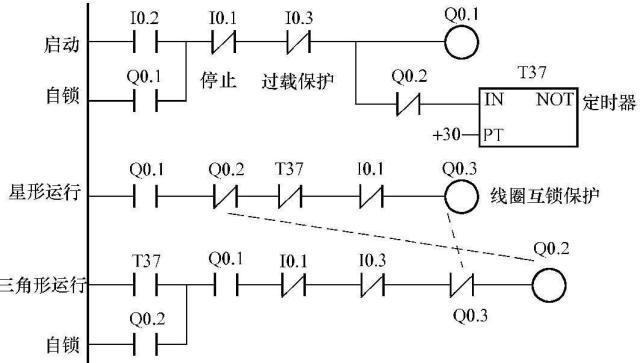
图5-60 Y-△减压启动梯形图
为了帮助读者更好地理解梯形图程序的执行过程,图5-60中梯形图程序执行过程分析如下:
按下SB2触点I0.2闭合→线圈Q0.1得电并自锁;定时器T37启动→线圈Q0.1动合触点闭合,线圈Q0.3得电→星形运行;同时Q0.3的动断触点断开,实现了互锁。
在按下SB2的同时→定时器T37定时3s→时间到,则T37动断触点断开,线圈Q0.3失电;T37动合触点接通,线圈Q0.2得电并自锁→三角形运行。 Q0.2的动断触点断开,实现了互锁。 Q0.2动断触点断开,定时器复位。
按下SB1停止按钮→整个系统停止运行。
操作人员可根据PLC上对应的I/O点进行硬件连线,按S7-200的说明书将电源线接好。 由于PLC的输出往往是强电,所以操作时一定要遵守安全操作规程,检验合格后才可以加电调试。
多点启动控制电路
在很多设备装置中,为了操作方便,常要求能在多个地点进行控制操作; 在某些机械设备上,为保证操作者的安全,需要满足多个条件设备才能开始工作。 这样的控制要求可以通过在电路中串联或并联电器的动断触点(常闭触点)或动合触点(常开触点)来实现,如图5-61、图5-62所示。
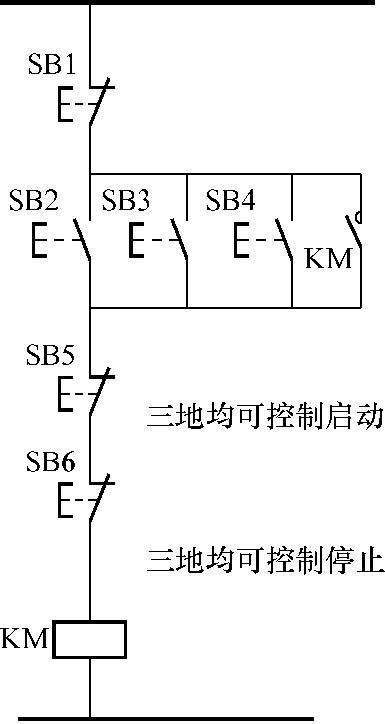
图5-61 多地点控制电路
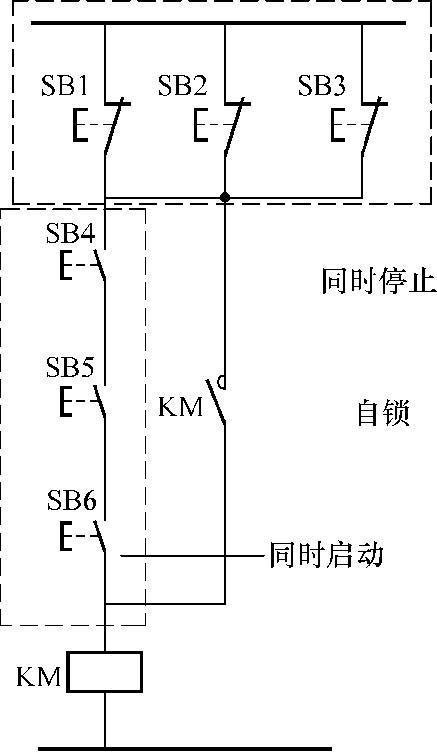
图5-62 条件控制电路
多地点控制电路,可以使用设置在不同位置的启动按钮启动设备,如图5-61所示,启动按钮SB2~SB4分别设置在A地、B地和C地,按下任何一个启动按钮,KM线圈自锁,保持设备的运行状态。 3个停止按钮为SB1、SB5、SB5,保证在方便的位置启动和停止设备。 如按表5-10设置I/O地址,则转化成PLC梯形图控制程序如图5-63所示。
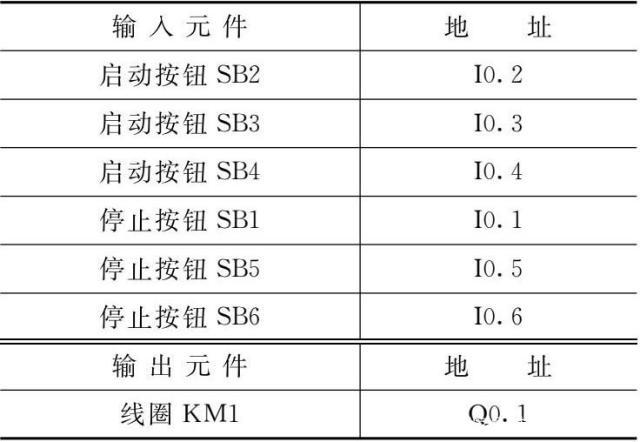
表5-10 多地点控制电路I/O地址分配表
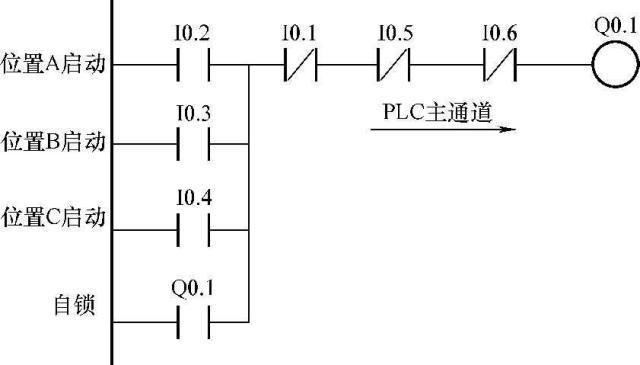
图5-63 多点控制梯形图程序
多条件控制电路中,要启动设备,处在A地、B地和C地3个不同地点的操作者必须同时按下启动按钮SB4、SB5、SB6,要停止设备也需要3个操作者同时按下停止按钮SB1、SB2、SB3才能完成。 因大型设备往往有很多工作位置,而单个操作者无法看清所有的位置,为了防止出现安全意外,根据设备的工作条件和安装情况,需要布置多个条件点。 按表5-11设置I/O地址,将图5-62转化成PLC控制程序,如图5-64所示。

表5-11 条件控制电路I/O地址分配表
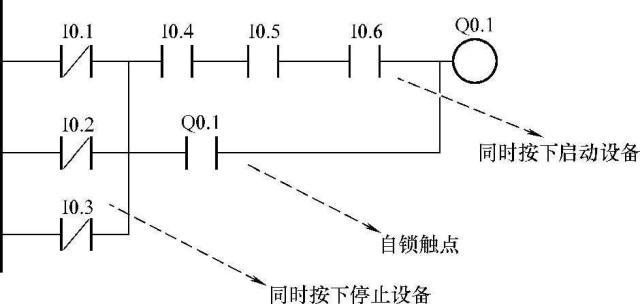
图5-64 多条件控制梯形图程序
自动门控制电路
自动门控制系统是利用PLC启保停电路的编程实现控制门的开关自动控制。 自动门控制系统的顺序功能图和梯形图如图5-65、5-66所示。
控制要求及控制步骤分析如下。
(1)当人靠近自动门时,感应器X0为ON,Y0驱动电动机高速开门,碰到开门减速开关X1时,变为减速开门。 碰到开门极限开关X2时,电动机停转,开始延时。 若在0.5s内感应器检测无人,Y2启动电动机高速关门。 碰到开门减速开关X4时,改为减速门,碰到开门极限开关X5时,电动机停转。 在关门期间,若感应器检测到有人,停止关门,T1延时0.5s后自动转换为高速开门。
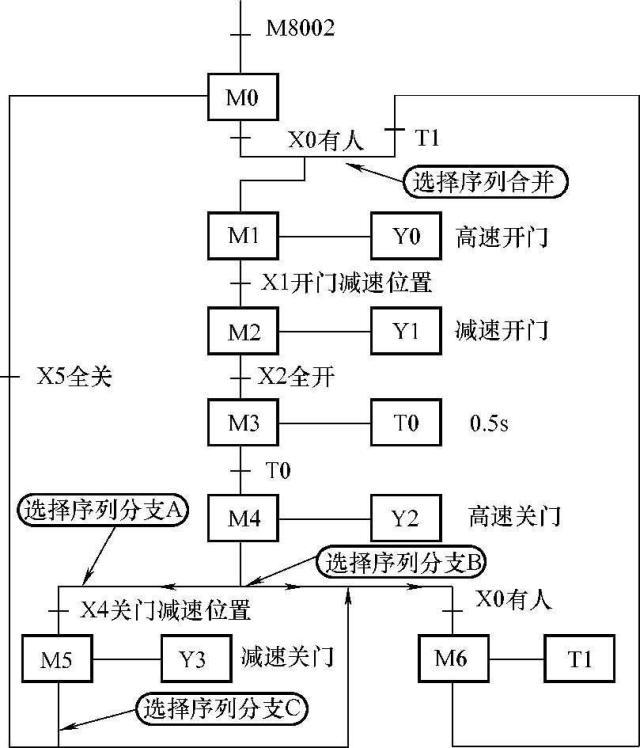
图5-65 自动门控制系统顺序功能图
在图5-65中,步[1]之前有一个选择序列的合并,当M0为活动步,并且转换条件X0满足,或M6为活动步,且转换条件T1满足时,步M1都应变为活动步,即控制M1的启动、保持、停止电路的启动条件应为M0和X0动合触点串联电路与M6和T1的动合触点串联电路进行并联(见图5-66的第二梯级)。
在图5-65中,M4之后有一个选择序列的分支,当它的后续步M5、M6变为活动步时,它应变为不活动步。 所以,需要将M5和M6的动断触点与M4的线圈串联。 同样,M5之后也有一个选择序列的分支,当它的后续步M0、M6变为活动步时,它应变为不活动步。 因此需要将M0、M6的动合触点串联电路与M5的线圈串联。
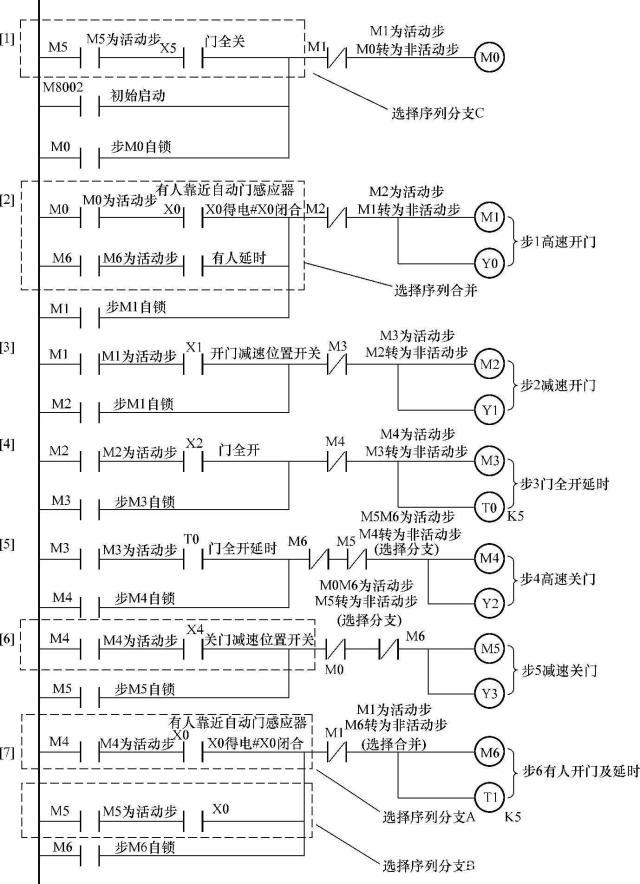
图5-66 自动门控制梯形图
初始启动过程:PLC开始运行后,M8002自动接通1个扫描周期,M0得电,M0(2)闭合,M0(1)闭合、自锁。
先分析步[1]~步[4]的工作过程(见图5-64):
当人靠近自动门感应器时,输入继电器X0得电,X0闭合,M1得电(M1已闭合),步M1进入活动步。 …… 步4后进行选择分支。
(2)无靠近自动门时,高速关门只减速关门位置,X4得电,X4闭合。 步M5后进行选择分支。
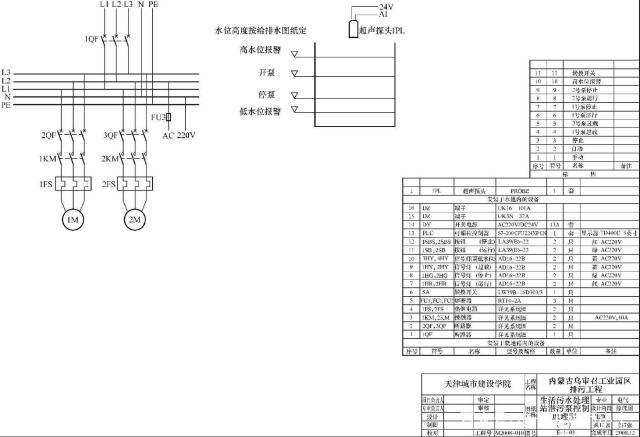
图5-67 潜污泵控制电路
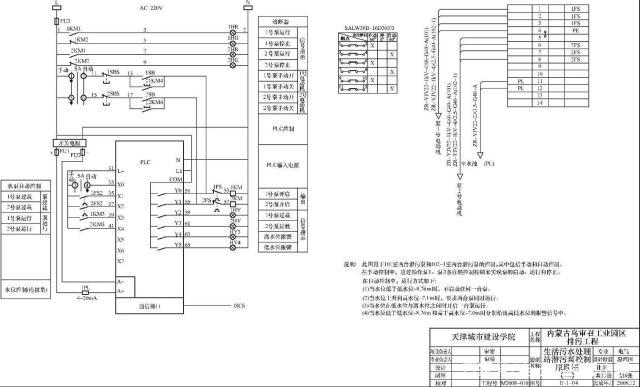
图5-68 潜污泵控制电路
识图时两图对照分析,读者可自行识图。
PLC电气控制工程图举例
图5-67、5-68为两台潜污泵启动、运行和停止手动和自动控制的电气工程图。 主电路为图5-67,与前述基本相同,图中还标出了水位控制点及高低水位报警线,液位传检测采用了超声波传感器。 图纸列出了设备清单。 而图5-68采用了PLC控制潜污泵的启动、停止及高低水位的报警。
根据工艺要求:在手动控制中,通过操作泵1、泵2各自的控制按钮实现泵的启动、运行和停止。
在自动控制中:
(1)当水位低于—8.76m时,两台泵处于停止状态。
(2)当水位上升到高水位—7.1m时,两台泵同时运行。
(3)当水位在低水位与高水位之间时,开启一台泵运行。
(4)当水位低于—8.76m和高于高水位—7.1m时,分别给出高低水位的报警信号。
图5-68将控制电路分成了若干个环节,PLC的输入、输出继电器的地址分配,从PLC模块的接线图可以看出,梯形图是根据上述要求绘制的。 识读时重点在于掌握如何在理解原理图的基础上阅读工程图。 图中增加了一些辅助环节,如手自动转换开关、信号显示等以及交直流电源。 识图者依照先主后辅的原则,先分析主要功能再分析辅助环节。
图中通过超声波传感器发出电信号,传送给PLC,PLC则根据电信号相对应的液位高度,发出指令控制泵的运行状态。 图5-68是完整的施工图,PLC模块的输入输出接线及与外部的连接方式表达得很清楚,读者可根据原理图及接线方式对照分析。
-
PLC编程语言最常用的控制电路分享2021-03-04 3858
-
介绍几种常用的PLC控制电路2022-08-17 9799
-
PLC控制电路图及原理讲解2023-03-15 21923
-
plc最简单的电路原理图 介绍几种最常用的控制电路(启动、保持和停止电路、互锁控制电路)2023-08-10 24859
-
常用电器控制电路精选2025-05-14 572
-
PLC常用的基本控制电路及梯形图2016-06-23 10443
-
控制电机的几种控制电路原理图2017-01-20 7038
-
【下载】《实用电机控制电路》李忠文编著——常用的机电设备控制电路经典大全2019-12-03 21434
-
介绍几种常见的运用PLC编程Y-△减压起动控制电路的方法2021-09-30 2228
-
介绍几种常用的电平转换电路2022-02-14 1441
-
几个常用控制电路原理图2010-01-08 5023
-
常用水泵控制电路图2016-03-24 4314
-
常用风机控制电路的电路原理图免费下载2020-05-09 5288
-
常用电机的控制电路图合集免费下载2020-07-13 2464
-
这三本PCB我觉得可以看看,常用电源电路,常用驱动电路,常用控制电路,常用控制电路里面甚至有飞控2022-01-10 1173
全部0条评论

快来发表一下你的评论吧 !
