

浅谈PLC控制器频率与伺服驱动器和负载转速
工业控制
描述
可以看出如果机械结构确定了,这个值也是确定的,1个脉冲对应走的位移是确定的,即系统的精度是确定的。如5mm导程的丝杠,与亿维伺服驱动直接连接的话,精度为5/10000mm。
一、PLC控制器频率与伺服驱动器和负载转速
已知伺服驱动器Pm=10000Pulse/r,PLC控制器发出的频率f (puls/s),如何计算负载轴的转速n(r/s),
当伺服电机直接连接轴,设电子齿轮比分子比分母为N。
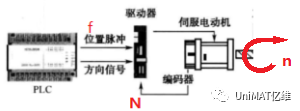
n=(f*N)/Pm ...........此公式求出单位为r/s,1s发的脉冲数除以一圈需要的脉冲数=1s转动的圈数。
n :负载转速,单位:r/s。
f:控制器发出的频率,单位:pls/s。
N:驱动器电子齿轮比。
Pm:伺服驱动器分辨率,单位:Pulse/r。
有了1式,可以推理出当负载轴带了转盘或者皮带轮,可以算出皮带的线速度V。

V=r*ω=r*2πn
将1式带入 :
V= πd ((f*N)/Pm)
d:皮带轮,负载轴的直径,单位:mm。
n :负载转速,单位: r/s。
f:控制器发出的频率,单位:pls/s。
N:驱动器电子齿轮比。
Pm:伺服驱动器分辨率,单位:Pulse/r。
现场可能碰到输出力矩不够,加有减速机的情况,设减速比为K。
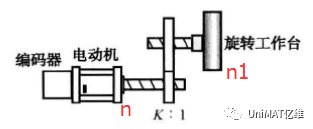
由1式,已经知道电机轴输出速度n,则可以求出过减速机后输出的转速n1。
n1=n/k=(f*N)/(Pm*K)...............r/s
n1=n/k=(f*N*60)/(Pm*K)...............r/min
假设n1轴带着的是滑块,我们还可以求出滑块移动的速度V
V=n1*D=(f*N*D)/(Pm*K)............mm/s
同理推导出 f=(V*Pm*K)/(N*D)
n:电机直连轴转速,单位:r/s。
n1:减速机后输出的转速,单位:r/s。
K:减速机减速比。
V:滑块移动的速度,单位:mm/s。
D:丝杠导程,单位:mm
二 、PLC控制器输出的脉冲与位移之间的关系
有了上面的一些介绍,我们再来讨论下:
如下图,已知我司伺服驱动器Pm=10000Pulse/r,丝杠的导程(螺纹间距,可以理解为电机转一圈丝杠走一个导程)为D,PLC控制器发出的脉冲个数为P,假设电子齿轮比为1。
如何求对应工作台移动的距离S?
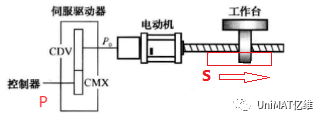
S=(D/Pm)*P......先求出1个脉冲走的位移,乘以脉冲个数得到移动的距离。如果设置了电子齿轮比N,则S=(D/Pm)*P*N....因为P*N才是伺服驱动发送给电机的实际脉冲。
D:丝杠导程,单位:mm
P:控制器发送脉冲个数,单位:个
如果是下面这个系统又该如何计算移动的距离呢?系统机械部分加有减速机减速比为K。
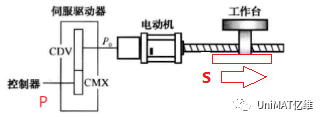
S=(D/(Pm*K))*P*N.........同理4求出一个脉冲走的位移,由于加了减速机,一个脉冲的位移反映到负载轴上比4上面更小。可以看出位移与系统减速机等齿轮结构成反比关系,与伺服驱动的电子齿轮比成正比关系。
根据上述式子,同理也可以推理出如果是带圆盘结构,脉冲数对应圆盘转动的角度。相当于D=360度。
上面4、5中提到“先求出1个脉冲走的位移”其实就是传说中的脉冲当量δ。
三 、浅谈脉冲当量δ
由4、5可知,(D/Pm)为不加减速机的脉冲当量,D/(Pm*K)为加减速机时,系统的脉冲当量。可以看出如果机械结构确定了,这个值也是确定的,1个脉冲对应走的位移是确定的,即系统的精度是确定的。如5mm导程的丝杠,与亿维伺服驱动直接连接的话,精度为5/10000mm。如果外部带有减速比为40的减速机则这个系统的脉冲当量为5/(10000*40)mm。以上确定的参数称为系统的固有脉冲当量。
假设需要将系统精度调整为1um/pls。需要怎么办呢?这时候伺服驱动的电子齿轮比就派上用场了。
用以下公式可求出:
1:5*1000/(10000*40)=1:1/80=80:1即将亿维US100伺服驱动器的电子齿轮比分子P1-00设置为80,分母P1-01设置为1。
编辑:黄飞
-
伺服驱动器需要设置哪些参数2024-07-13 8948
-
松下伺服驱动器惯量比怎么改2024-06-14 4010
-
PLC控制伺服驱动器的主要方式2024-06-12 4555
-
伺服驱动器过载时间是累计的吗2024-06-06 1460
-
伺服驱动器和伺服控制器的区别2024-06-05 4774
-
PLC怎么控制伺服驱动器2024-06-03 2635
-
伺服驱动器的作用与原理、应用领域2024-01-17 10657
-
伺服控制器怎么调_伺服控制器和伺服驱动器的区别2023-03-12 4055
-
PLC与伺服驱动器、负载的关系2023-02-22 4705
-
伺服驱动器的技术要求2023-01-13 2568
-
浅谈一下伺服驱动器和变频器的区别和共同点2021-09-14 3291
-
什么是伺服驱动器?运动控制器PLC又是什么?2021-06-28 7382
全部0条评论

快来发表一下你的评论吧 !
