

单片机输出PWM案例
控制/MCU
1933人已加入
描述
PWM的应用可以说非常广泛,控制电机速度、灯光亮度、通信调制等众多领域。
PWM的问题小伙伴问的比较多,最近也在用PWM,这里就分享一下关于PWM的一些内容。
 通过改变其中频率(脉冲周期)、占空比,就能应用在很多场合。
通过改变其中频率(脉冲周期)、占空比,就能应用在很多场合。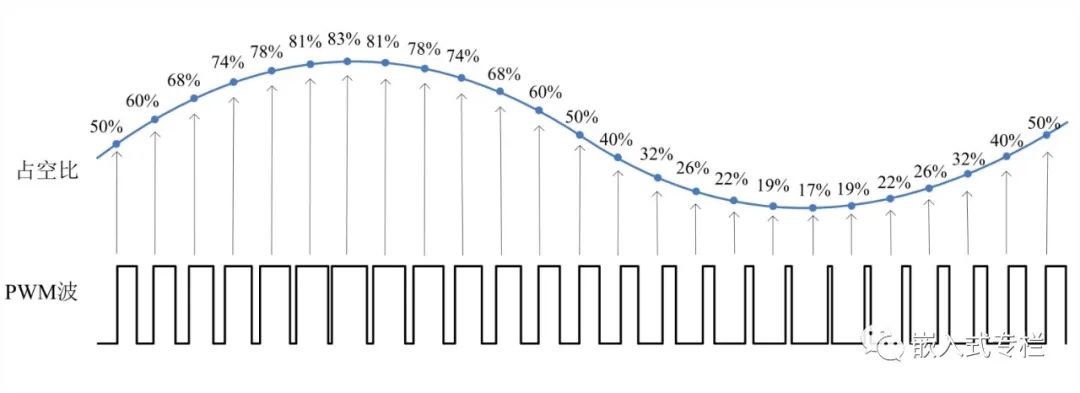
初始化配置,调用函数接口,直接就输出PWM波形了: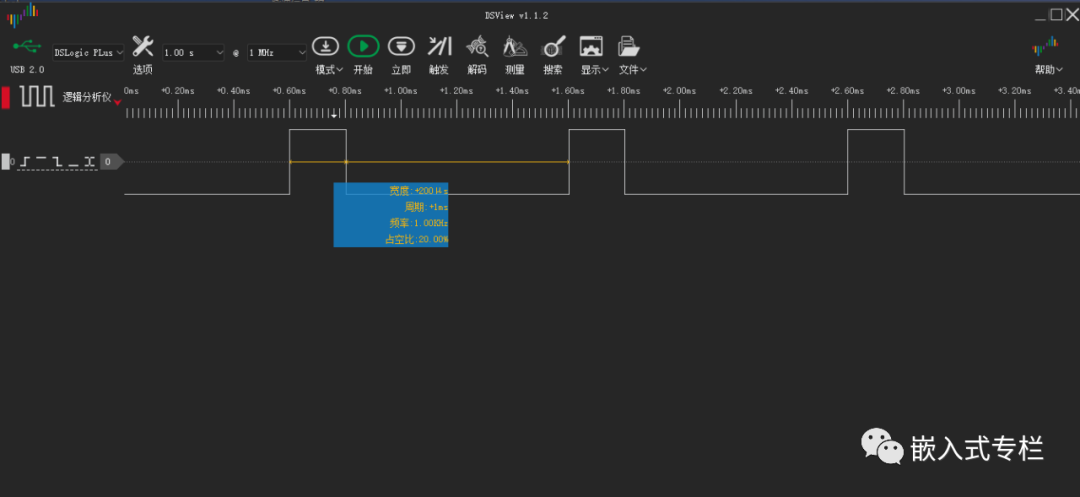 说明:本例使用的是STM32标准外设库,如果要深入理解其中原理,还是建议使用标准外设库。
当然,如果想要快速使用PWM这个功能,不想理解其原理,可以直接使用STM32CubeMX配置生成代码:
说明:本例使用的是STM32标准外设库,如果要深入理解其中原理,还是建议使用标准外设库。
当然,如果想要快速使用PWM这个功能,不想理解其原理,可以直接使用STM32CubeMX配置生成代码: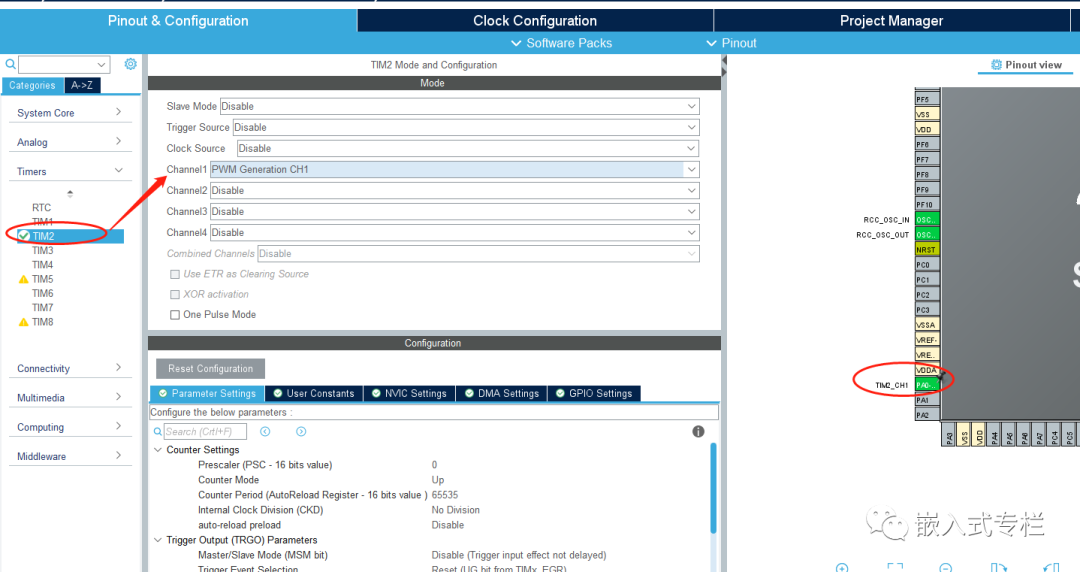
 需要增加对应的“映射”代码:
需要增加对应的“映射”代码:
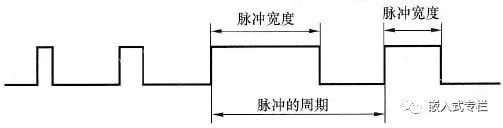
什么是PWM?
PWM:Pulse Width Modulation,脉冲宽度调制。 网上的解释很多,通过下图,你就能直观的理解PWM,其实就是高低电平组成的脉冲信号。
通过改变其中频率(脉冲周期)、占空比,就能应用在很多场合。
PWM常见输出方式
通过上面描述,PWM就是一个IO口以不同的时间周期输出高、低电平。 1.新手(菜鸟)级别while循环中,阻塞延时,控制IO口高低输出:
while(1)
{
IO口高电平
Delay阻塞延时
IO口低电平
Delay阻塞延时
}
阻塞延时可以是:软件模拟延时,定时器阻塞延时等。
2.入门(初级)级别while循环中,非阻赛延时,控制IO口高低输出:
while(1)
{
IO口高电平
Delay非阻塞延时
IO口低电平
Delay非阻塞延时
}
非阻赛延时可以是:定时器标识检测、RTOS(系统)延时等。
3.熟悉(中级)级别定时器中断控制IO高低电平输出:定时器中断配置 ——> 启动定时器 ——> 响应中断,控制IO高低电平···4.熟练(中级+)级别定时器PWM硬件控制输出:
配置PWM对应的IO,以及定时器PWM输出 ——> 启动PWM自动输出···
void AppTask(void *p_arg)
{
PWM_TIM_Configuration();
PWM_Output(频率, 占空比);
while(1)
{
//自己的应用代码
}
}
比较:上面几种PWM输出方式,前面三种都会CPU干预PWM的输出,也就是会占用CPU资源,特别是前面两种方式,不仅占用CPU,误差还比较大。
使用第三种中断方式,如果频率比较高,CPU消耗的也比较严重。这种情况适合于没有硬件PWM输出的单片机。
第四种就是单片机自带硬件PWM输出功能,只需要简单配置就可以自动输出PWM波形,无需CPU干预。
硬件输出PWM例子
这里以大家熟悉的STM32F1为例:为大家简单分享一下硬件定时器输出PWM波形。 PWM定时器相关宏定义:
//定时器计数时钟(1M次/秒)
#define PWM_COUNTER_CLOCK 1000000
//预分频值(与系统时钟、计数值有关)
#define PWM_PRESCALER_VALUE (SystemCoreClock/PWM_COUNTER_CLOCK - 1)
PWM配置:
/**
* @brief 定时器PWM输出配置
* @param 无
* @retval 无
*/
void PWM_TIM_Configuration(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
/* 时钟配置 */
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
/* 引脚配置 */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_Init(GPIOA, &GPIO_InitStructure);
/* 时基配置 */
TIM_TimeBaseStructure.TIM_Prescaler = PWM_PRESCALER_VALUE; //预分频值
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //向上计数
TIM_TimeBaseStructure.TIM_Period = 0xFFFF; //定时周期(暂定值)
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; //分频因子
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure);
/* PWM模式配置 */
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //输出PWM1模式
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //使能输出
TIM_OCInitStructure.TIM_Pulse = 0; //脉宽值(暂定值)
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性(TIM_OC1对应通道1)
TIM_OC1Init(TIM2, &TIM_OCInitStructure);
}
PWM输出函数接口:
/**
* @brief 输出PWM
* @param Frequency:频率
Dutycycle:占空比
* @retval 无
*/
void PWM_Output(uint32_t Frequency, uint32_t Dutycycle)
{
uint32_t tim_period;
uint32_t tim_pulse;
tim_period = PWM_COUNTER_CLOCK/Frequency - 1; //计算出计数周期(决定输出的频率)
tim_pulse = (tim_period + 1)*Dutycycle / 100; //计算出脉宽值(决定PWM占空比)
TIM_Cmd(TIM2, DISABLE); //失能TIM
TIM_SetCounter(TIM2, 0); //计数清零
TIM_SetAutoreload(TIM2, tim_period); //更改频率
TIM_SetCompare1(TIM2, tim_pulse); //更改占空比(TIM_SetCompare1对应通道1)
TIM_Cmd(TIM2, ENABLE); //使能TIM
}
初始化配置,调用函数接口,直接就输出PWM波形了:
void AppTask(void *p_arg)
{
PWM_TIM_Configuration();
PWM_Output(1000, 20);
while(1)
{
//自己的应用代码
}
}
输出PWM波形:
说明:本例使用的是STM32标准外设库,如果要深入理解其中原理,还是建议使用标准外设库。
当然,如果想要快速使用PWM这个功能,不想理解其原理,可以直接使用STM32CubeMX配置生成代码:
配置注意事项
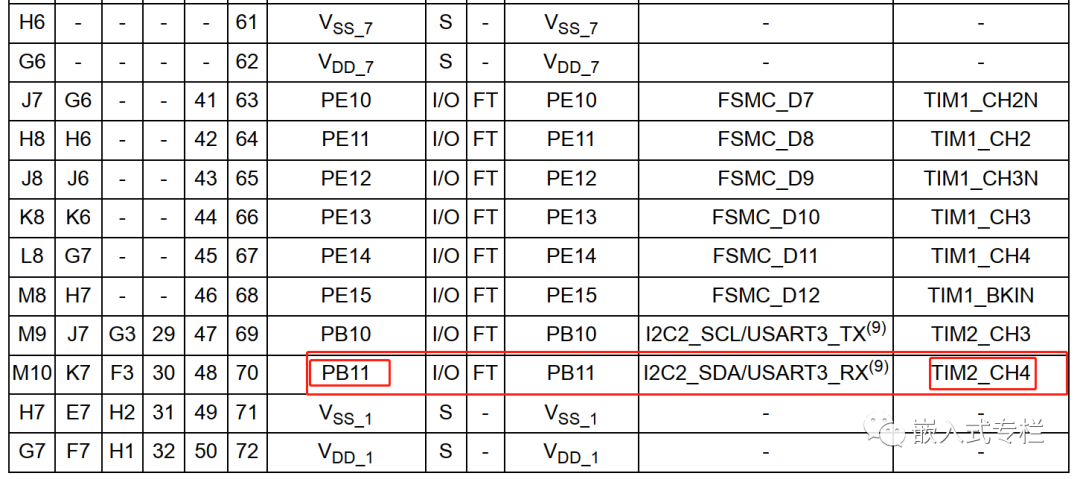
想要更加精确控制,并更加满足应用层的需求,就需要自己一步一步深入了解原理。 下面说几点常见的问题吧。 1.引脚映射如果你使用的引脚需要映射,就需要配置对应的参数。 比如:STM32F1使用PB11(需要查看数据手册):
需要增加对应的“映射”代码:
//复用功能
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE);
//定时器(PWM)引脚映射
GPIO_PinRemapConfig(GPIO_FullRemap_TIM2, ENABLE);
2.频率和占空比精度如果使用32位定时器的话,频率范围更宽、精度也可以达到更高。比如:频率:0.01Hz、 占空比0.01%等。
如果是16位的话,其中的参数都不能超过16位(65535):
#define PWM_COUNTER_CLOCK 1000000
#define PWM_PRESCALER_VALUE (SystemCoreClock/PWM_COUNTER_CLOCK - 1)
tim_period = PWM_COUNTER_CLOCK/Frequency - 1; //计算出计数周期(决定输出的频率)
tim_pulse = (tim_period + 1)*Dutycycle / 100; //计算出脉宽值(决定PWM占空比)
具体可根据自己情况进行配置,比如PWM(定时器)计数时钟、分频值等。
实际应用代码,建议增加各个参数的判断,以防越界(这里为了方便理解,就写的比较简单)。
3.更多STM32都有硬件PWM输出功能,但不同的系列,其配置可能略有一些差异,简单参考官方例程以及手册。
现在大部分单片机都自带有硬件PWM输出功能,硬件的好处就是不用CPU干预。如果没有,可以尝试上面说的定时器中断的方式。
审核编辑:汤梓红
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
请问单片机输出PWM需要形成控制回路吗?2023-10-17 579
-
如何实现STM8单片机输出PWM波时动态改变频率?2022-02-21 3556
-
单片机输出PWM有哪些注意事项2022-01-11 1898
-
使用STM32单片机输出PWM波形2021-12-06 1881
-
如何将单片机输出的PWM波最低电压抬高?2021-03-26 4111
-
单片机输出PWM脉冲有什么方法2021-03-12 3365
-
使用51单片机输出PWM波形的程序免费下载2019-08-29 1671
-
0-5V转PWM谁有做过单片机方案,为什么我的单片机输出PWM老是不稳?2019-06-06 3513
-
请问STM32单片机输出的PWM怎么进行长距离传输?2019-05-05 4865
-
单片机输出pwm波2017-05-03 5130
-
基于单片机输出pwm波来控制冷暖两色贴片灯来调节色温程序 怎么写2016-09-21 6122
-
利用ATMEGA16单片机输出PWM波形控制温度的程序哪位大神有 啊2016-05-07 5239
-
如何利用51单片机输出PWM波2015-12-31 1826
-
51系列单片机输出PWM的两种方法2013-05-26 19355
全部0条评论

快来发表一下你的评论吧 !
