

详细剖析模板匹配
描述
模板匹配介绍
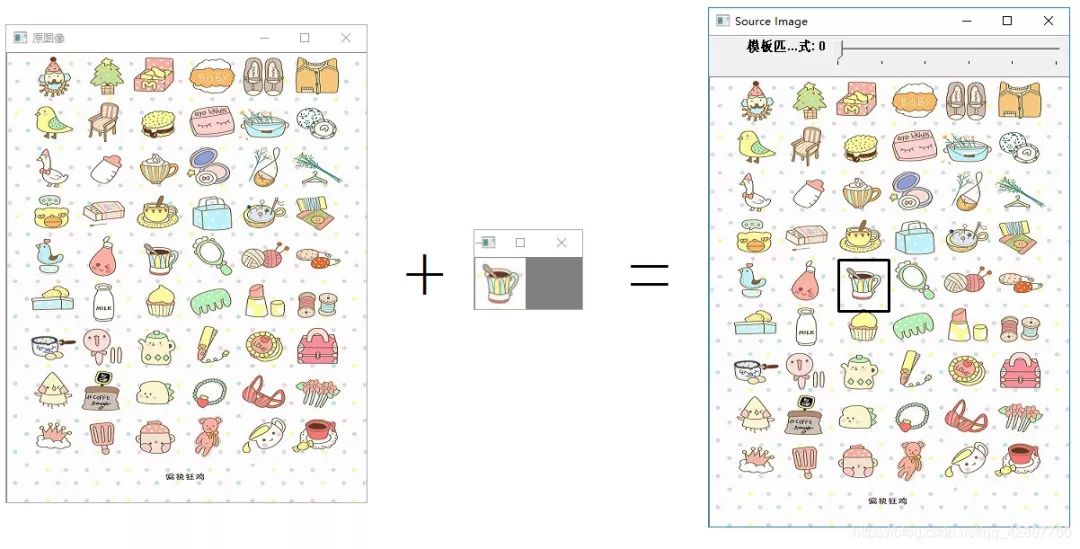
我们需要2幅图像:
原图像 (I): 在这幅图像里,我们希望找到一块和模板匹配的区域
模板 (T): 将和原图像比照的图像块
-
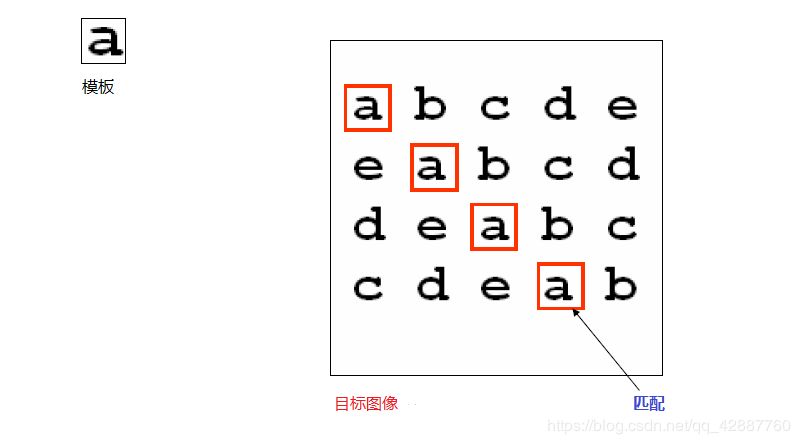
模板匹配就是在整个图像区域发现与给定子图像匹配的小块区域。
-
所以模板匹配首先需要一个模板图像T(给定的子图像)
-
另外需要一个待检测的图像-源图像S
-
工作方法,在带检测图像上,从左到右,从上向下计算模板图像与重叠子图像的匹配度,匹配程度越大,两者相同的可能性越大。
模板匹配原理
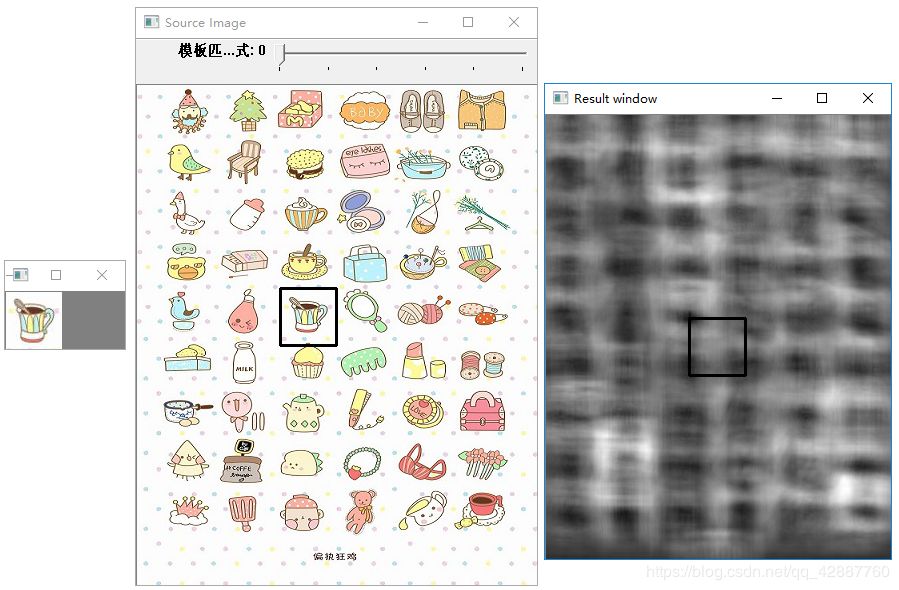
我们的目标是检测最匹配模板的原图像的区域:
为了确定匹配模板区域, 我们不得不滑动模板图像和原图像进行比较 :

对于 模板(T) 覆盖在 原图像 (I) 上的每个位置,你把度量值保存 到 结果图像矩阵 ( R ) 中. 在 R 中的每个位置 (x,y) 都包含匹配度量值:
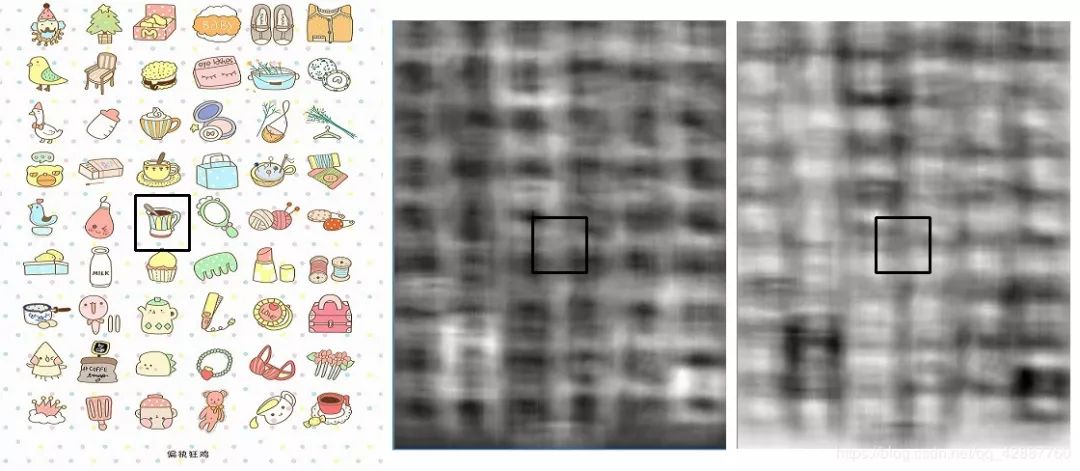
上图(右)就是 TM_CCORR_NORMED 方法处理后的结果图像 R . 最白的位置代表最高的匹配. 正如您所见, 黑色框住的位置很可能是结果图像矩阵中的最大数值, 所以这个区域 (以这个点为顶点,长宽和模板图像一样大小的矩阵) 被认为是匹配的.
实际上, 我们使用函数 minMaxLoc 来定位在矩阵 R 中的最大值点 (或者最小值, 根据函数输入的匹配参数) .
void minMaxLoc(InputArray src, double* minVal, double* maxVal=0, Point* minLoc=0, Point* maxLoc=0, InputArray mask=noArray())
-
src:输入图像。
-
minVal:在矩阵 src中存储的最小值,可输入NULL表示不需要。
-
maxVal :在矩阵 src中存储的最大值,可输入NULL表示不需要。
-
minLoc:在结果矩阵中最小值的坐标,可输入NULL表示不需要,Point类型。
-
maxLoc:在结果矩阵中最大值的坐标,可输入NULL表示不需要,Point类型。
-
mask:可选的掩模
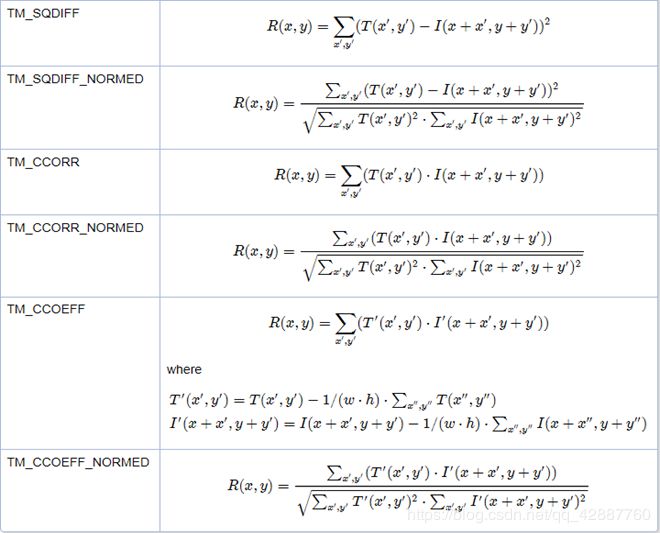
模板匹配介绍 – 匹配算法介绍:
OpenCV中提供了六种常见的匹配算法如下:
-
计算平方不同 :计算出来的值越小,越相关 TM_SQDIFF = 0

-
计算相关性:计算出来的值越大,越相关 TM_CCORR = 2

-
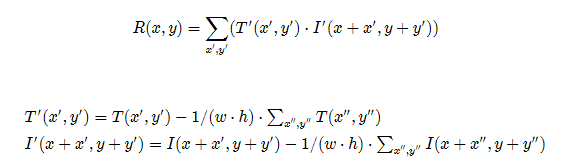
计算相关系数:计算出来的值越大,越相关 TM_CCOEFF = 4
-
计算归一化平方不同 :计算出来的值越接近0,越相关 TM_SQDIFF_NORMED = 1

-
计算归一化相关性:计算出来的值越接近1,越相关 TM_CCORR_NORMED = 3

-
计算归一化相关系数:计算出来的值越接近1,越相关 TM_CCOEFF_NORMED = 5

总结如下:
相关API介绍cv::matchTemplate
matchTemplate(
InputArray image,// 源图像,必须是8-bit或者32-bit浮点数图像
InputArray templ,// 模板图像,类型与输入图像一致
OutputArray result,// 输出结果,必须是单通道32位浮点数,假设源图像WxH,模板图像wxh, 则结果必须为W-w+1, H-h+1的大小。
int method,//使用的匹配方法
InputArray mask=noArray()//(optional)
)

程序代码
#include
运行结果

审核编辑 :李倩
-
基于LockAI视觉识别模块:C++多模板匹配2025-05-14 1873
-
基于LockAI视觉识别模块:C++模板匹配2025-05-13 1026
-
OpenCV边缘模板匹配算法原理详解2023-12-07 3454
-
OpenMV如何实现旋转模板匹配呢2023-01-14 2958
-
什么是模板匹配?模板匹配的原理讲解 图像处理与模板匹配算法2022-05-05 38075
-
探究halcon模板匹配干扰边缘消除办法2021-05-29 6512
-
机器视觉中基于灰度统计的快速模板匹配算法详细概述2020-08-18 1331
-
labview 视觉 多模板匹配 教程2019-09-24 23446
-
OpenCV3编程入门-源码例程全集-模板匹配2016-09-17 905
-
模板匹配2016-06-06 884
-
基于模板匹配的图像跟踪技术2010-12-20 1001
-
基于模板匹配的电子元器件针脚检测方法2010-08-02 1052
-
基于改进模板匹配的芯片缺陷检测方法2009-09-03 630
-
手写数字识别的模板匹配方法源程序2008-01-02 890
全部0条评论

快来发表一下你的评论吧 !
