

伺服轴状态机功能块介绍
工业控制
1285人已加入
描述
本节结合伺服轴的状态机介绍MC_Halt和MC_Stop功能块,对比了两个功能块执行时状态机的变化,及用法上的区别。
2_具体操作介绍
1.编程
在act_Admin中添加MC_Halt和MC_Stop功能块的调用。
2.添加VISU画面
添加新的VISU_StateStop画面,在画面中添加如下几个功能块的VISU
MC_Halt
MC_Stop
MC_MoveVelocity
MC_MoveRelative
并添加轴的状态机StateMachine
3.测试Halt和Stop
在MC_MoveVelocity运行时,状态机的状态是ContinuousMotion,执行MC_Halt轴降速停止期间,轴状态会切换到Discrete Motion。停止完成后,轴状态自动切换到StandStill。
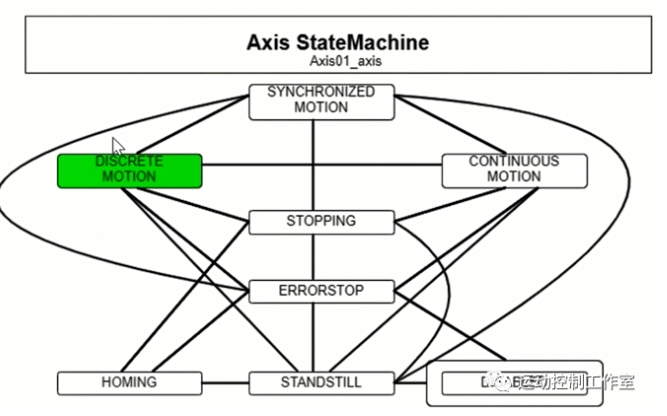
在MC_MoveVelocity运行时,状态机的状态是ContinuousMotion,执行MC_Stop后,轴状态会切换到Stopping,并保持,直至轴完全停止且MC_Stop的Execute置为False后,轴状态切换回StandStill.
4.测试停止过程中启动新运动
执行MC_Halt期间,轴状态为Discrete Motion,此时可随时启动新运动,比如MC_MoveRelative。
执行MC_Stop期间,以及MC_Stop的Execute复位为False之前,轴状态为Stopping,无法启动新运动。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
什么是FB功能块?为什么要使用FB功能块?如何制作一个FB功能块?2023-11-09 7647
-
什么是状态机?状态机的种类与实现2023-10-19 13339
-
状态机编程实例-面向对象的状态设计模式2023-06-28 3601
-
功能块MCA_CamInDirect的电子凸轮功能2023-04-30 2410
-
ECAT_motion管理功能块介绍2023-03-08 1246
-
STM32按键状态机2——状态简化与增加长按功能2022-09-03 5802
-
基于事件驱动的有限状态机介绍2021-11-16 3213
-
CPM功能块使用入门2021-05-09 952
-
FPGA:状态机简述2020-11-05 9169
-
状态机概述 如何理解状态机2019-01-02 11525
-
PLCopen轴组运动功能块研究2018-03-12 1331
-
状态机原理及用法2016-03-15 1698
-
基于EPA的PID功能块的设计及实现2009-09-26 879
全部0条评论

快来发表一下你的评论吧 !
