

添加伺服轴的参数设置
工业控制
描述
本节介绍添加的伺服轴的参数设置,以及EtherCAT通讯相关参数设置。
2_配置对比介绍
首先回顾一下硬件配置:
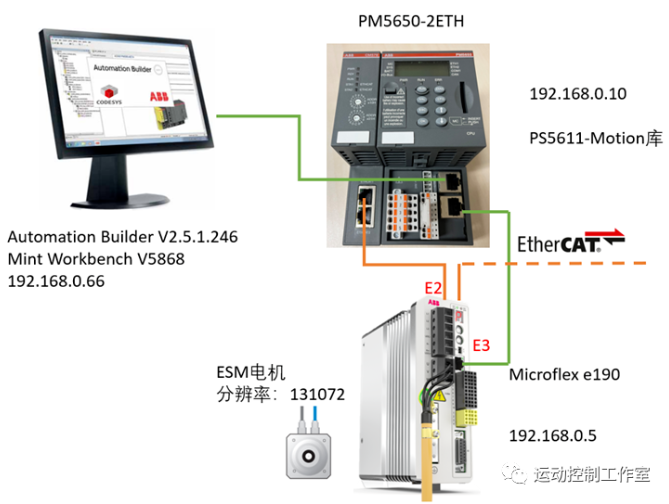
EtherCAT模块CM579-ECAT安装在第一个扩展插槽中。伺服驱动器通过以太网线挂在CM579-ECAT下。由此,回到Automation Builder项目树的结构。
CM579: CM579模块挂在Extension_Bus的第一个扩展插槽上。
ETHCAT_Master:对应EtherCAT主站(Master)的一些参数设置。
Axis01(Microflex e190): 对应驱动器的相关参数。
Axis01_axis: 可理解为挂在物理伺服驱动器下的伺服电机。
注:Axis01_axis此处可理解为物理轴。上节中介绍到的Motion Solution wizard中使用的轴可理解为NC轴。在后续常规PLC编程中使用的轴变量可理解为PLC轴。
3_具体操作介绍
3.1 轴参数设置(Setting)
1. 双击Axis01_axis可进入轴的参数设置
轴类型:要根据具体应用,选择相应的轴类型。若负载是圆盘可选择Modulo(rotary)或Finite(rotary),负载是滚轴丝杠可选择Linear(rotary screw)。直线电机可选择Linear(Linear motor)。对应的轴如果需要模拟运行,可勾选Axis simulation mode。
Unit: 根据负载类型及控制精度,选择相应的用户单位。
Pulses per revolution scaling: 设置电机编码器精度
Application gearing及相关:当伺服电机连接有减速装置时,需使用这部分设置,以换算负载侧的用户单位与电机编码器间的对应关系。即:电子齿轮比。
Direction and Homing type:
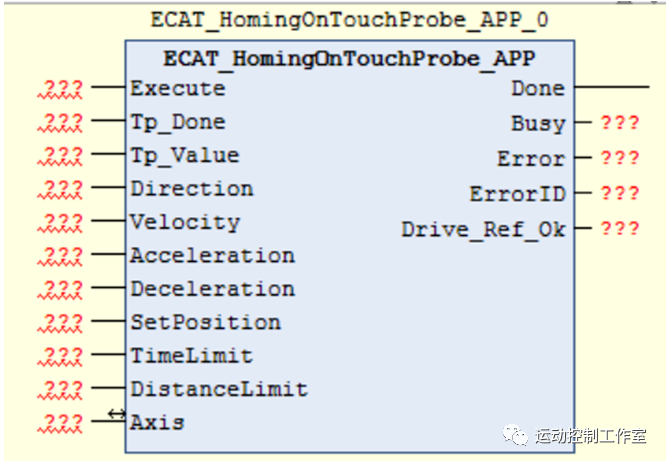
设置电机的回转方向。通过勾选“Invert Direction“可切换电机的回转方向。通过勾选“Homing using DRIVE IO Touch Probe”,可使用探针进行回零。
PS5611-MC运动控制库中有探针回零的功能块:
Position Control (cyclic sync mode):位置环的PID参数。
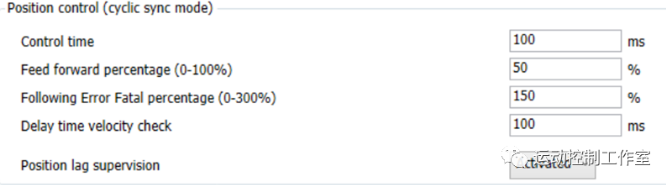
其中,Position lag supervision用于设置是否实时监控跟随误差。如激活,则会触发跟随误差超值报警。
Dynamic limits: 设置速度/加速度/加加速度的最大值。设置时要注意用户单位。
Drive Based limits:驱动器侧的相关限值,包含最大速度和最大扭矩。
Results(calculated):基于前述设置,计算得出的参数结果。
轴参数设置,要在深刻理解伺服电机参数,机械传动装置和具体应用需求的前提下设置,是伺服控制的基础。
3.2 轴参数设置(Mapping)
与EtherCAT控制相关,伺服轴的参数设置。
Control Type: 控制类型,选择CSP,CSV或CSVL类型。CSP对应位置控制,CSV对应速度控制。
Additional PDO mapping: 除了基本PDO外,如果需要其它PDO,可在此勾选。此处列出的是常用的附加PDO。如还需要添加其它PDO,可通过伺服驱动器的Expert Settings页面添加。
常见需添加的PDO为:探针,主编码器数值,跟随误差,DI&DO等。
SDO:常用服务数据对象。
3.3 伺服驱动器参数
General标签页:查看相关参数,其中DC设置分布式时钟。分布式时钟DC-Synchronous是EtherCAT运动控制多轴同步精度的基础。
在本页勾选”Expert Setting”可显示专家数据页面,在其中可更灵活地组态PDO & SDO。
Process Data: 此页面显示为当前轴设置的PDO。对于EtherCAT(Cia402)轴,有4个PDO是必须设置的,如下图:
如果在上节3.2 轴参数设置(Mapping)中勾选了Additional PDO,或通过Expert setting页面组态了新的PDO,相应PDO也会显示到本页面。
Startup Parameters:启动参数,对应勾选的SDO,或在Expert Setting中组态的新的SDO。
其它几个标签页不再赘述,可保持默认。
3.4 ETHCAT_Master
General 标签页的Distributed Clock下,可设置同步时钟的周期。需根据选用的PLC性能及伺服轴的数量,以及具体应用的控制需求,综合考量。这些需求也是CPU选型的重要考量。
同步周期需要在EtherCAT Master上设置。Master侧设置完后,Slave侧会自动更新。DC 的Cycle time一般设置为1ms,2ms,4ms。性能高的CPU可设置为500μs。
其它几个标签页,可保持默认即可,大都是提供一些映射信息。
4_本节总结
Axis轴参数设置和EtherCAT基本参数设置,涉及的概念比较多,包括机械传动,伺服电机,轴&控制类型,EtherCAT的通讯原理,PDO & SDO等。相关知识点,需要学员通过连续不断地学习与实践,加深系统理解,非本文可完全涵盖。
-
施耐德电气伺服驱动常用参数设置2026-04-22 488
-
伺服驱动器需要设置哪些参数2024-07-13 10561
-
松下伺服参数设置步骤2024-06-12 7068
-
安川伺服pn600参数设置方法2024-06-06 5149
-
变频器参数设置方法2023-07-11 7985
-
伺服驱动器的参数设置方法和故障排查技巧2023-05-24 13865
-
Vivado布线和生成bit参数设置2023-05-16 6687
-
变频器参数设置2023-04-07 2010
-
伺服控制器的参数设置_伺服控制器报警代码2023-03-12 11122
-
变频器功能参数设置2023-01-31 13838
-
EtherCAT运动控制卡的总线轴参数设置和轴运动2021-11-08 5235
-
台达ASDA系列伺服驱动器PLC的控制实例参数设置及PLC程序免费下载2020-12-15 4372
-
PMAC_参数设置2016-04-26 1315
全部0条评论

快来发表一下你的评论吧 !
