

如何在Automation Builder中创建一个新工程
工业控制
描述
本节主要介绍如何在Automation Builder中创建一个新工程,创建的工程项目树的基本结构,以及如何跟PLC建立连接等。
2_具体操作介绍
1.新建工程
打开Automation Builder,创建新工程。
在创建新工程时,软件会弹出新工程模板。因我们是要做EtherCAT运动控制的工程,因此,此处要选“Motion Solution Wizard”。
当创建“Motion Solution Wizard”工程时,项目会自动调用运动控制库、运动控制相关的模块,并隐式生成运动轨迹计算及EtherCAT通讯的核心代码。
2.选择PLC硬件, 添加驱动器
根据向导,会自动弹出选择PLC硬件的窗口。根据实际连接的PLC,选择相应型号。
如果选择的CPU是PM56xx时,因上一步创建的是”Motion Solution Wizard”工程,因此,在项目创建时,会自动在CPU的扩展插槽中添加EtherCAT通讯模块CM579-ETHCAT。
项目创建完后,会自动弹出窗口,要求为项目添加EtherCAT从站。本工程中,添加的Microflex e190伺服驱动器会自动添加到ETHCAT_Master节点下。
3.项目树介绍
项目树的主节点如下:
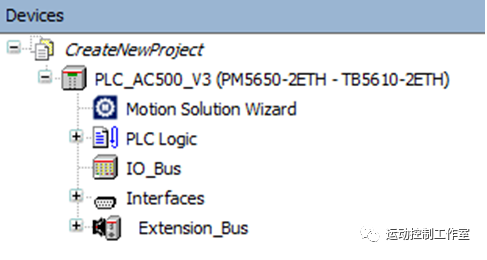
ØPLC_AC500_V3
对应添加的CPU。双击此节点,可以执行针对CPU的所有操作及监控
Motion Solution Wizard
双击此节点,会进入运动控制的核心设置界面,比如添加&删除伺服轴,监控各轴的状态,打开Mint Workbench软件等。
PLC Logic
PLC程序节点。此节点展开后,进入程序编辑功能,比如添加&删除程序对象、库管理、以及对任务配置等。
同时,因工程模板选中的是“Motion Solution Wizard”, 因此PLC Logic下会自动添加一个”Motion Solution_Generated“文件夹,此文件夹下会包含软件隐式生成的运动轨迹计算及EtherCAT通讯的变量及核心代码。
ØIO_Bus
当需要给CPU扩展功能模块时,需要把相关的DI/DO/AI/AO或其它模块添加到IO_Bus下。
ØInterfaces
CPU一般都自带很多通讯端口,比如以太网口,串口或CAN等。软件会依据添加的CPU型号,自动添加对应的通讯端口节点到Interfaces下,并可对各个通讯端口进行配置。
ØExtension_Bus
本工程添加的CPU是PM5650,这是一款AC500 V3 CPU。其安装底板有三种,TB5610/TB5620/TB5640。这三款底板的差别是扩展插槽的数量不同,分别是有1/2/4个。可以根据工程需要,在扩展插槽中添加需要的通讯模块,比如EtherCAT,ProfiNet,EtherNet/IP, Modbus TCP等。
本工程中使用的是TB5610,即只有一个扩展插槽。扩展插槽中安装EtherCAT通讯模块。
4.硬件更换
当需要更换CPU型号或底板型号时,可以在双击CPU的配置页面进行相关操作。
5. ETH1Ð2功能设置
PM5650的底板,本体包含两个以太网口ETH1Ð2。这两个ETH口可作为两个独立的以太网口使用,也可以通过设置,使两个ETH口的功能设置为“Switch Functionality ETH1-ETH2”。
6.PLC Online
可以通过Scan Network,自动搜索连接的CPU,并Login,使CPU处于在线状态。
-
【飞思卡尔小技巧】使用KL25-SC中快捷工具创建新工程2014-12-29 4191
-
使用飞思卡尔KL25-SC中快捷工具创建新工程2015-01-20 4190
-
转:使用KL25-SC中快捷工具创建新工程2016-06-04 3276
-
怎样使用STM32CubeIDE1.0软件去创建一个新工程呢2021-10-25 1244
-
单片机之创建新工程简析2022-01-05 1012
-
如何为SPC560P40的MCU创建一个新工程呢?2022-12-22 666
-
HarmonyOS低代码开发-创建新工程方式2023-05-18 3808
-
怎么在AVR Studio5创建一个新工程2018-07-04 4124
-
如何在IP Integrator中创建MicroBlaze设计2018-11-20 4018
-
TMS320F28377新工程的创建与基础工程配置教程说明2020-10-19 3479
-
如何在vivado创建新工程上使用IP集成器创建块设计2022-02-08 3912
-
如何在KEIL C51 软件上创建一个工程2021-11-23 963
-
Qt新工程创建向导暗藏玄机2023-01-30 2009
-
如何在Automation Builder更新伺服驱动器2023-03-08 1210
-
中文编程鸿蒙Hi3861开发基础案例之-01创建新工程2023-05-11 4777
全部0条评论

快来发表一下你的评论吧 !
