

基于ABB AC500 V3系列PLC的运动控制
工业控制
描述
01 综 述
从本篇起,将连续介绍基于ABB AC500 V3系列PLC的运动控制。实验的基础配置如下图:
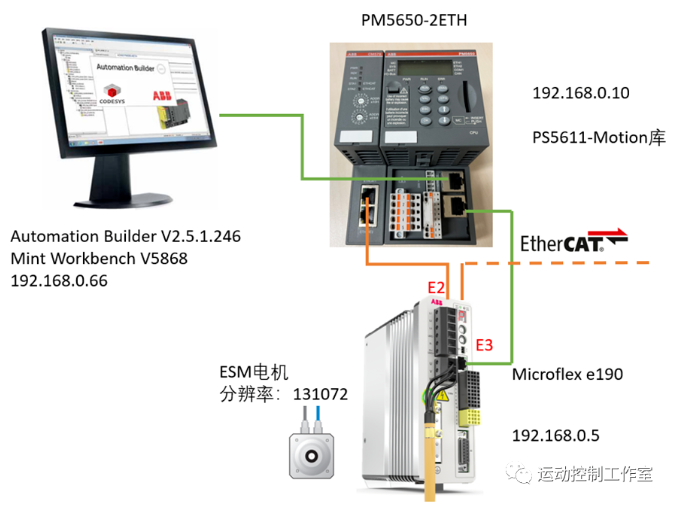
运动控制实在是一个极大的题目,包含控制器、驱动器、电机,控制方式等很多要素,且各个要素都有多种变化形式。为简便,仅以笔者最熟悉,实验最方便,且最具代表性的一种配置展开讲解。
讲解基于ABB最新的运动控制系列产品,如下:
|
序号 |
名称 |
型号 |
版本 |
|
1 |
PLC软件 |
Automation Builder Premium |
V2.5.1.246或更新 |
|
2 |
运动控制库 |
PS5611-Motion运动控制库 |
|
|
3 |
Mint 软件 |
Mint Workbench |
V5868或更新 |
|
4 |
PLC |
PM5650-2ETH套件 |
|
|
5 |
EtherCAT模块 |
CM579-ECAT |
|
|
6 |
伺服驱动器 |
Microflex e190 |
Firmware 5904.6 或更新 |
|
7 |
伺服电机 |
ESM04X-101-302-T2N0A00 |
02 方案的典型性
ABB的PLC编程软件 Automation Builder基于CoDeSys V3.5开发,其界面环境和操作习惯与标准的CoDeSys基本相同。
ABB的运动控制库PS5611-MC基于PLCopen标准开发,这是做运动控制的工程师所熟悉的。
PLC和伺服之间通过EtherCAT实时工业以太网通讯,应用层采用Cia402行规。EtherCAT是当下非常流行的运动控制总线,其优势已被市场充分证明。
基于以上三条,个人以为这种配置是一种比较典型的运动控制方案。便于使初学者直接接触流行、通用的运动控制技术。
03 伺服驱动器的准备
在PLC编程之前,首先要把驱动器进行正确设置。凡支持EtherCAT(Cia402)的伺服驱动器都可使用,因在本方案中,伺服只是一个执行元件,运动控制的核心算法,即Profile Generator存在于PLC内。 测试基于ABB的Microflex e190伺服驱动器。

伺服驱动器的准备,因厂家和产品的不同而不同。如下仅简要讲解Microflex e190的准备。
1. PC与驱动器设置到同一网段内
Mint Workbench是ABB Microflex e190系列伺服的专用整定软件,PC通过以太网与伺服驱动器连接。伺服驱动器的默认IP是:192.168.0.1 因此,开始整定前,需把PC与伺服设置在同一网段内,并与伺服驱动器建立连接。
2. 软件的打开及基本设置
软件安装好后,打开软件,及软件打开时的基本设置。
3. 切换语言,FDF
Mint Workbench支持中文或英文界面。无论是帮助文档,说明书还是软件,一般建议直接使用原生语言。
4. 驱动器调试向导
伺服驱动器的使用不是独立的。它上连驱动器,下连电机,电机还会连接机械机构。因此,针对伺服本身,有些基本参数需要设置。比如:电机类型,电机型号,编码器反馈、工作模式(扭矩、速度、位置)、控制方式(本地、远程)、极限值(最大速度,最大电流等)、电子齿轮比、模拟量设置等。这些均可在Mint Workbench中,通过向导,一步一步完成设置。
5. 自动整定或手动整定
整定环节,电机会小幅度正反转,在转动过程中,计算电流环、速度环和位置环的PID增益,检测编码器反馈,并检测计算负载的惯量。如果自动整定效果不好,还可手动整定,以微调各控制环的PID参数。
6. 拨码设置成00, ECAT模式。
Microflex e190的以太网口(E1&E2)可以工作在EtherCAT, PowerLink或ProfiNet模式下。具体使用哪种协议,可通过驱动器前端的拨码开关设置。

EtherCAT模式,需把拨码开关拨到00
7.保存ESI文件 下载固件 更改IP地址
从站设备描述文件ESI(EtherCAT Slave Information)是EtherCAT从站设备的配置文件,文件为XML格式。不同厂家、型号甚至固件版本的伺服驱动器,其ESI文件都是不一样的。ESI文件是与某一型号产品的特定固件相对应的。在本方案中,ESI文件相当于从站的个人简历。只有把简历文件传给控制器,控制器才能了解并使用驱动器。在Mint Workbench中,可以把在线驱动器的ESI文件保存到本地。
另外还介绍了伺服固件升级及IP更改的基本操作。
8.设置控制源
Microflex e190是一款智能伺服驱动器,可以工作在本地模式,也可工作在远程模式。当Profiler Generator算法由驱动器完成时,伺服工作在本地模式。当Profiler Generator算法由控制器完成时,伺服工作在远程模式。本方案中,要把伺服的控制源设置为:RT-Ethernet(Cia-402),即远程模式。
-
工业自动化施耐德M340与ABB AC500 PLC Modbus协议转换方案2025-11-24 2180
-
ABB AC500 系统编辑小程序2024-10-28 1589
-
ABB-PIC工业编程器编程手册AC5002021-12-10 1272
-
AC500可编程控制器用户手册2021-05-24 1367
-
AC500编程软件使用实例2021-05-18 813
-
ABB-AC500-PLC性能指标2021-05-14 1132
-
AC500可编程控制器手册2021-05-13 1168
-
ABB-AC500PLC通讯连接方法图解2021-05-07 1872
-
可编程控制器AC500使用说明书下载2021-04-11 1108
-
ABB公司AC500可编程控制器的使用指南(中文)2017-11-06 2383
-
PS501及AC500编程软件介绍2017-10-13 1215
-
基于AC500安装与拆卸2017-10-02 985
-
ABB PLC-AC500控制系统及其在污水处理中的应用2009-06-13 2344
全部0条评论

快来发表一下你的评论吧 !
