

相机标定之四个坐标系之间的变换关系
描述
世界坐标系,相机坐标系,图像物理坐标系,像素坐标系之间的关系:
首先看下几个坐标系在放在一块的样子:
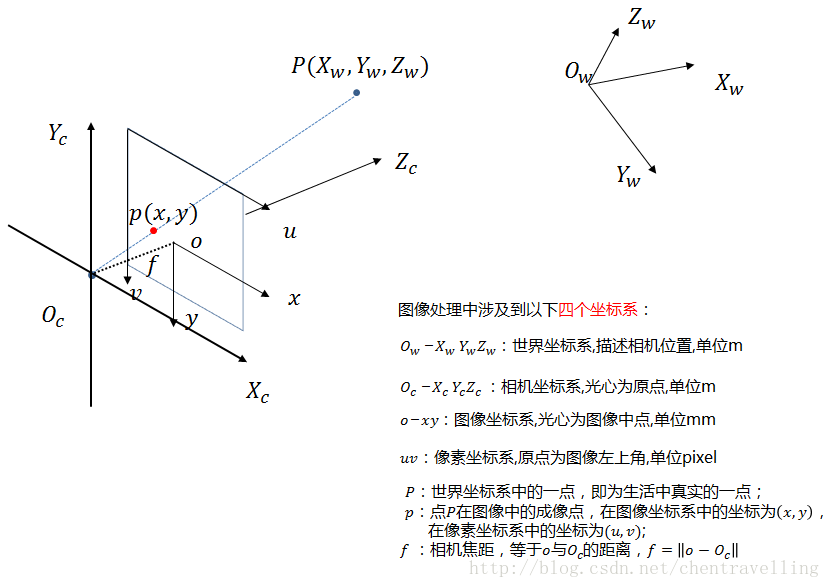
1:世界坐标系:根据情况而定,可以表示任何物体,此时是由于相机而引入的。单位m。
2:相机坐标系:以摄像机光心为原点(在针孔模型中也就是针孔为关心),z轴与光轴重合也就是z轴指向相机的前方(也就是与成像平面垂直),x轴与y轴的正方向与物体坐标系平行,其中上图中的f为摄像机的焦距。单位m
3:图像物理坐标系(也叫平面坐标系):用物理单位表示像素的位置,坐标原点为摄像机光轴与图像物理坐标系的交点位置。坐标系为图上o-xy。单位是mm。单位毫米的原因是此时由于相机内部的CCD传感器是很小的,比如8mm x 6mm。但是最后图像照片是也像素为单位比如640x480.这就涉及到了图像物理坐标系与像素坐标系的变换了。下面的像素坐标系将会讲到。
4:像素坐标系:以像素为单位,坐标原点在左上角。这也是一些opencv,OpenGL等库的坐标原点选在左上角的原因。当然明显看出CCD传感器以mm单位到像素中间有转换的。举个例子,CCD传感上上面的8mm x 6mm,转换到像素大小是640x480. 假如dx表示像素坐标系中每个像素的物理大小就是1/80. 也就是说毫米与像素点的之间关系是piexl/mm.
好了四个坐标系都解释完了,接下来就说下各个坐标系中间的变换关系吧。
一:世界坐标到相机坐标系
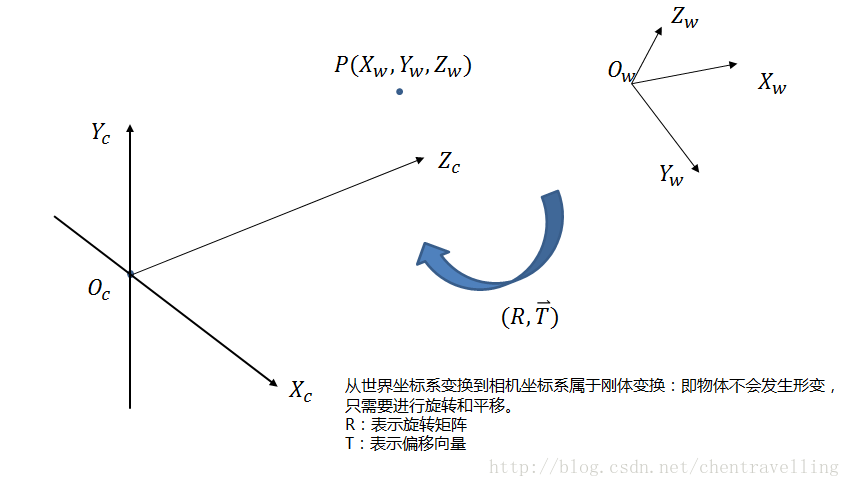
物体之间的坐标系变换都可以表示坐标系的旋转变换加上平移变换,则世界坐标系到相机坐标系的转换关系也是如此。绕着不同的轴旋转不同的角度得到不同的旋转矩阵。如下:
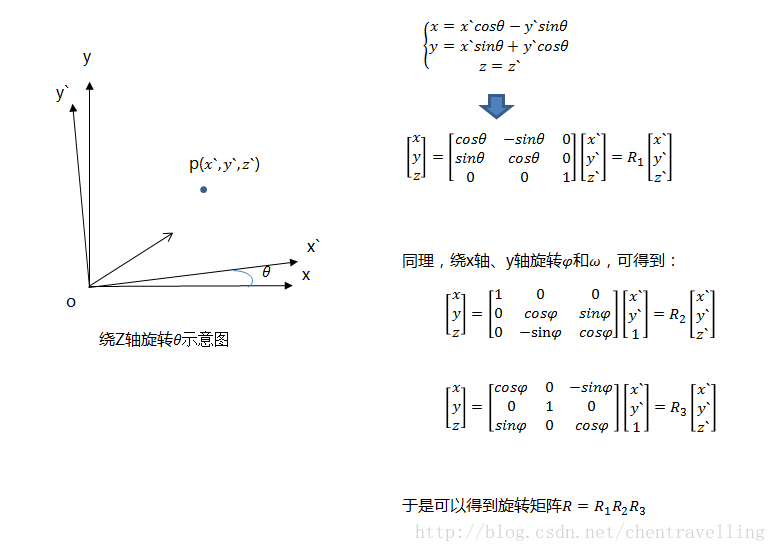
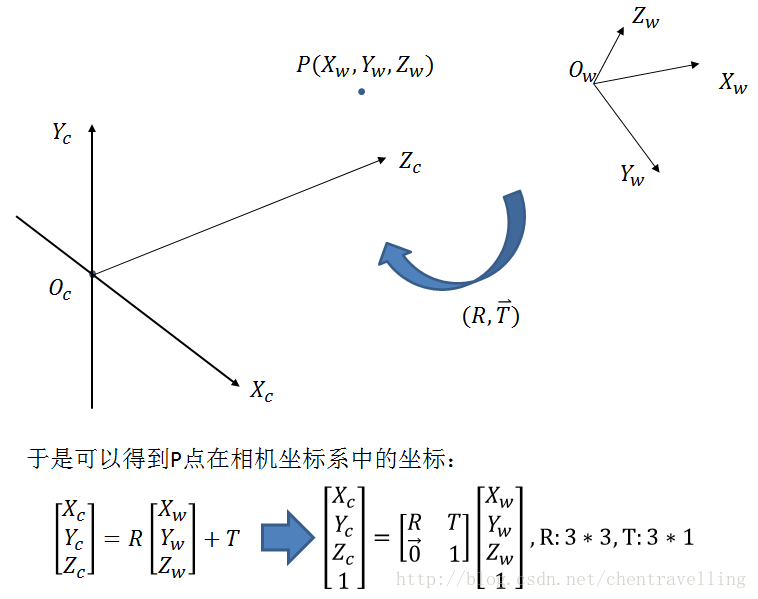
那么世界坐标系到相机坐标系的变换如下:
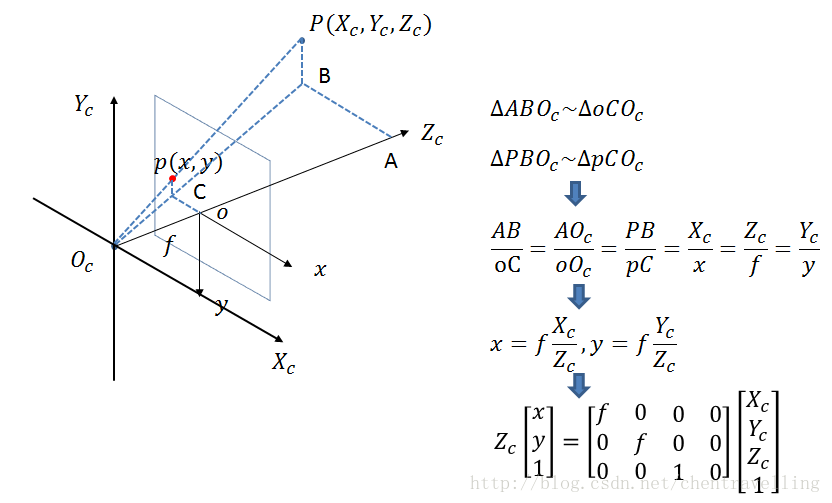
二:相机坐标系到图像物理坐标系
从相机坐标系到图像坐标系,属于透视投影关系,从3D转换到2D。也可以看成是针孔模型的改变模型。满足三角形的相似定理。
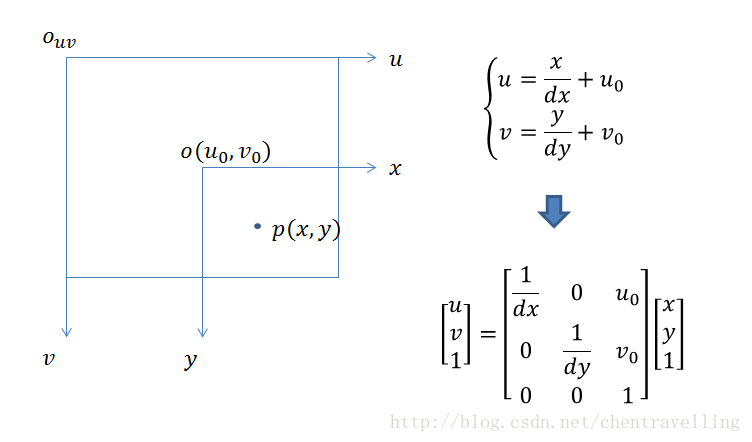
三:图像物理坐标系到像素坐标系。
此时与前面的坐标系变换不同,此时没有旋转变换,但是坐标原点位置不一致,大小不一致,则设计伸缩变换及平移变换。
综上所述,大家可以看出四个坐标系之间存在着下述关系 ( 矩阵依次左乘 )
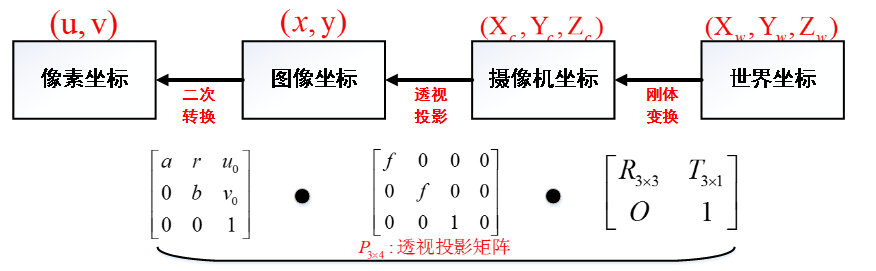
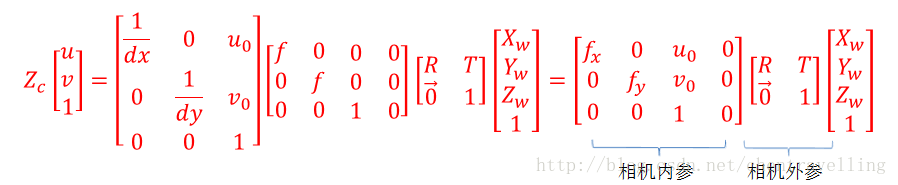
其中相机的内参和外参可以通过张正友标定获取。通过最终的转换关系来看,一个三维中的坐标点,的确可以在图像中找到一个对应的像素点,但是反过来,通过图像中的一个点找到它在三维中对应的点就很成了一个问题,因为我们并不知道等式左边的Zc的值。
审核编辑:汤梓红
-
abb机器人工具坐标系问题2024-08-07 14526
-
谁给看看这两个坐标系之间该怎么变换2016-05-30 3526
-
坐标系转换与手眼标定2019-06-20 2486
-
解决电压方程在静止坐标系与运动坐标系转换问题2021-08-27 1696
-
介绍坐标系和机器人之间的纽带即连杆坐标系2021-09-01 1578
-
非正交坐标系中转子振动的测量2009-07-16 571
-
基于小波变换的双目系统标定研究与实现2010-01-07 786
-
opencv相机标定原理与步骤2017-12-04 19409
-
机器人基坐标系标定方法研究2018-03-07 1095
-
多相机视觉系统的坐标系统标定与统一及其应用2023-03-13 3608
-
世界坐标系、相机坐标系、图像坐标系、像素坐标系之间的关系2023-07-03 16174
-
浅谈自动驾驶技术常用坐标系统关联和转换2023-10-30 2474
-
工业现场相机坐标系和机械手坐标系的标定2023-11-12 3497
-
相机标定中的坐标变换原理难点分析2023-12-19 5611
-
应用卫星通信领域的一个坐标转换过程—机体坐标系与ENU坐标系的转换2023-12-27 8790
全部0条评论

快来发表一下你的评论吧 !
