

浅析运动规划、路径规划、轨迹规划
描述
来源:古月居
1. 运动规划
让我们从移动机器人运作的流程中来看待规划的作用
首先传感器接收外部物理信息(感知与数据融合)
然后将这些信息进行处理,一方面让机器人知道自己的位置(定位),一方面存储关于周围环境位置的信息(建图),SLAM(同时定位与建图)是最近比较火的一个研究热点
收集到足够的位置信息和地图信息后,就进入到了规划阶段,规划用来解决怎么走的问题,路径规划和轨迹规划统称为运动规划
运动规划完成后,就编写实际的控制程序,使机器人移动到目标位置了

移动机器人运作流程
2. 路径规划VS轨迹规划
2.1 路径&路径规划
路径是构型空间中连续的曲线(所谓构型空间就是机器人能到达的所有的点)[1],下图直观地展示了从c(0)到c(1)的一个路径.
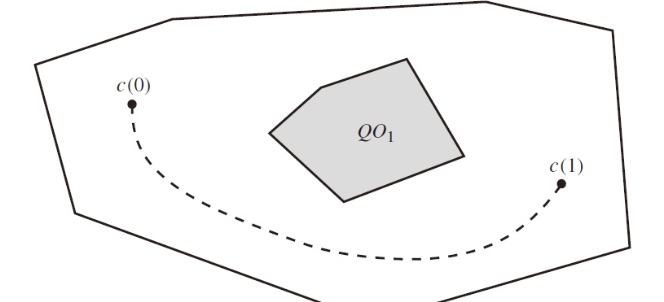
路径(图中虚线)
路径数学上用c(s)表示,具体含义如下.

所以路径规划,就是在已知几何约束(比如障碍物,地图等)情况下求解路径.
2.2 轨迹&轨迹规划
机器人移动过程中,控制器提供了用于跟踪的一系列目标位置和目标速度.机器人的位置/时间函数就叫做轨迹[2].对它分别进行一次/二次求导就可以得到机器人的速度/加速度信息.
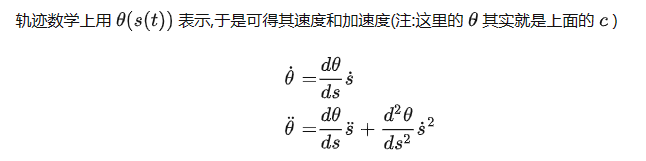
所以轨迹规划,就是在已知时间约束(限定多长时间到达)速度约束(速度最高能到多少)的情况下求解轨迹.其中路径可能已知,可能未知.
审核编辑:汤梓红
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
自动驾驶核心技术之路径规划2018-12-25 12295
-
机器人路径规划2013-09-03 4722
-
运动控制速度规划2015-09-04 4414
-
路径规划 人工势场2017-05-15 4361
-
多段路径规划的轨迹生成2021-09-01 1177
-
介绍一种永磁同步电机控制的轨迹规划方案2022-10-12 3153
-
机器人的轨迹规划与生成2017-10-13 975
-
浅析自动驾驶核心技术的路径规划2018-09-09 7850
-
机器人路径规划算法,全局路径规划与局部路径规划究竟有哪些区别2020-12-26 6599
-
决策规划系列:运动规划常用算法2023-04-17 2463
-
自动驾驶之路径规划2023-06-01 659
-
自动驾驶轨迹规划之路径规划总结2023-06-07 951
-
使用激光雷达和运动捕捉进行自主路径规划2023-06-27 1028
-
自动驾驶轨迹规划功能模块图2023-10-04 1830
-
EtherCAT运动控制器PT/PVT实现用户自定义轨迹规划2024-08-15 3299
全部0条评论

快来发表一下你的评论吧 !
