

Linux TWI开发指南
描述
Linux TWI开发指南
1 前言
1.1 文档简介
介绍 Sunxi 平台上 TWI 驱动接口与调试方法,为 TWI 模块开发提供参考。
1.2 目标读者
TWI 模块内核层以及应用层的开发、维护人员。
1.3 适用范围
表1-1:适用产品列表
| 内核版本 | 驱动文件 |
|---|---|
| Linux-4.9 | i2c-sunxi.c |
| Linux-5.4 | i2c-sunxi.c |
2 模块介绍
2.1 模块功能介绍
全志公司的 twi 总线兼容 i2c 总线协议,是一种简单、双向二线制同步串行总线。它只需要两根线即可在连接于总线上的器件之间传送信息。TWI 控制器支持的标准通信速率为 100kbps,最高通信速率可以达到 400kbps。全志的 twi 控制器支持一下功能:
• 支持主机模式和从机模式;
• 主机模式下支持 dma 传输;
• 主机模式下在多个主机的模式下支持总线仲裁;
• 主机模式下支持时钟同步,位和字节等待;
• 从机模式下支持地址检测中断;
• 支持 7bit 从机地址和 10bit 从机地址;
• 支持常规的 i2c 协议模式和自定义传输模式;
sunxi 平台支持多路 TWI,包含 TWI 与 S_TWI。
2.2 相关术语介绍
2.2.1 硬件术语
表 2-1: 硬件术语
| 相关术语 | 解释说明 |
|---|---|
| TWI | Two Wire Interface,全志平台兼容 I2C 标准协议的总线控制器 |
2.2.2 软件术语
表 2-2: 软件术语
| 相关术语 | 相关术语 |
|---|---|
| Sunxi | 全志科技使用的 linux 开发平台 |
| I2C_dapter | linux 内核中 I2C 总线适配器的抽象定义.IIC 总线的控制器,在物理上连接若干个 I2C 设备 |
| I2C_algorithm | linux 内核中 I2C 总线通信的抽象定义。描述 I2C 总线适配器与 I2C 设备之间的通信方法 |
| I2C Client | linux 内核中 I2C 设备的抽象定义 |
| I2C Driver | linux 内核中 I2C 设备驱动的抽象定义 |
2.3 模块配置介绍
在不同的 Sunxi 硬件平台中,TWI 控制器的数目不同;但对于同一块板子上的每一个 TWI 控制器来说, 模块配置类似,本小节展示 Sunxi 平台上的 TWI0 控制器配置(其他 TWI 控制器配置类似)。
2.3.1 device tree 默认配置
设备树中存在的是该类芯片所有平台的模块配置,设备树文件的路径为:{linux-ver}/arch/arm64(32 位平台为 arm)/boot/dts/sunxi(32 位系统无这目录)/xxxx.dtsi(CHIP 为研发代号,如sun50iw10p1 等), TWI 总线的设备树配置如下所示:
twi0: twi@0x05002000{
#address-cells = <1>;
#size-cells = <0>;
compatible = "allwinner,sun50i-twi"; //具体的设备,用于驱动和设备的绑定
device_type = "twi0"; //设备节点名称,用于sys_config.fex匹配
reg = <0x0 0x05002000 0x0 0x400>; //TWI0总线寄存器配置
interrupts = ; //TWI0总线中断号、中断类型
clocks = <&clk_twi0>; //设备使用的时钟
clock-frequency = <400000>; //TWI0控制器的时钟频率
pinctrl-names = "default", "sleep"; //TWI0控制器使用的Pin脚名称,其中default为正常通 信时的引脚配置,sleep为睡眠时的引脚配置
pinctrl-0 = <&twi0_pins_a>; //TWI0控制器default时使用的pin脚配置
pinctrl-1 = <&twi0_pins_b>; //TWI0控制器sleep时使用的pin脚配置
twi_drv_used = <1>; //使用DMA传输数据
status = "disabled"; //TWI0控制器是否使能
};
在 linux-5.4 中,TWI 的配置与 linux-4.9 内核配置有些不同,区别主要体现在 clock 和 dma 的配置上:
twi0: twi@0x05002000{
#address-cells = <1>;
#size-cells = <0>;
compatible = "allwinner,sun20i-twi"; //具体的设备,用于驱动和设备的绑定
device_type = "twi0"; //设备节点名称,用于sys_config.fex匹配
reg = <0x0 0x02502000 0x0 0x400>; //TWI0总线寄存器配置
interrupts-extended= <&plic0 25 IRQ_TYPE_LEVEL_HIGH>; //TWI0总线中断号、中断类
clocks = <&ccu CLK_BUS_I2C0>;//twi控器使用的时钟
resets = <&ccu RST_BUS_I2C0>;//twi控器使用的reset时钟
clock-names = "bus";
clock-frequency = <400000>; //TWI0控制器的时钟频率
dmas = <&dma 43>, <&dma 43>;//TWI0控制器的dma通道号
dma-names = "tx", "rx";
status = "disabled";//TWI0控制器是否使能
};
为了在 TWI 总线驱动代码中区分每一个 TWI 控制器,需要在 Device Tree 中的 aliases 节点中为每一个 TWI 节点指定别名:
aliases {
soc_twi0 = &twi0;
soc_twi1 = &twi1;
soc_twi2 = &twi2;
soc_twi3 = &twi3;
...
};
别名形式为字符串 “twi” 加连续编号的数字,在 TWI 总线驱动程序中可以通过 of_alias_get_id()函数获取对应 TWI 控制器的数字编号,从而区别每一个 TWI 控制器。
其中 twi0_pins_a, twi0_pins_b 为 TWI 的引脚配置的配置节点。linux4.9 中 该 配 置 的 路 径 为 arch/arm64(32 位 平 台 为 arm)/boot/dts/sunxi/xxxxpinctrl.dtsi(CHIP 为研发代号,如 sun50iw10p1 等),具体配置如下所示:
twi0_pins_a: twi0@0 {
allwinner,pins = "PD14", "PD15"; //TWI控制器使用的引脚
allwinner,pname = "twi0_scl", "twi0_sda"; //TWI控制器的引脚功能说明
allwinner,function = "twi0"; //引脚功能描述
allwinner,muxsel = <4>; //引脚复用功能配置
allwinner,drive = <0>; //io驱动能力
allwinner,pull = <0>; //内部电阻状态
};
twi0_pins_b: twi0@1 {
allwinner,pins = "PD14", "PD15";
allwinner,function = "io_disabled";
allwinner,muxsel = <7>;
allwinner,drive = <1>;
allwinner,pull = <0>;
};
linux-5.4 中该配置的路径为 arch/arm64(32 位平台为 arm)/boot/dts/sunxi/xxxx.dtsi(CHIP为研发代号,如 sun50iw10p1 等),具体如下所示:
twi0_pins_a: twi0@0 {
pins = "PH0", "PH1";
function = "twi0";
drive-strength = <10>;
};
twi0_pins_b: twi0@1 {
pins = "PH0", "PH1";
function = "gpio_in";
}
另外 clk_twi0 为时钟的配置。
在 linux-4.9 中, 路 径 为 arch/arm64(32 位 平 台 为 arm)/boot/dts/sunxi/XXXXclk.dtsi(CHIP 为研发代号,如 sun50iw10p1 等),具体配置如下所示:
clk_twi0: twi0 {
#clock-cells = <0>;
compatible = "allwinner,periph-clock";
clock-output-names = "twi0"; //指定clock名称,用于匹配clock配置
};
在 linux-5.4 中,无需配置。
2.3.2 board.dts 板级配置
board.dts 用于保存每一个板级平台的设备信息(如 demo 板,perf1 板,ver1 板等等),里面的配置信息会覆盖上面的 device tree 默认配置信息。board.dts 的路径为 longan/device/config/chips/IC/configs/BOARD/board.dts,
在 linux-4.9 中,对应 board.dts 里面 TWI0 的具体配置如下:
twi0_pins_a: twi0@0 {
allwinner,pins = "PA0", "PA1";
allwinner,pname = "twi0_scl", "twi0_sda";
allwinner,function = "twi0";
allwinner,muxsel = <4>;
allwinner,drive = <1>;
allwinner,pull = <0>;
};
twi0_pins_b: twi0@1 {
allwinner,pins = "PA0", "PA1";
allwinner,function = "io_disabled";
allwinner,muxsel = <7>;
allwinner,drive = <1>;
allwinner,pull = <0>;
};
twi0: twi@0x05002000{
clock-frequency = <400000>; //i2c时钟频率为400K
pinctrl-0 = <&twi0_pins_a>;
pinctrl-1 = <&twi0_pins_b>;
status = "okay"; //使能TWI0
};
在 linux-5.4 中,对应 board.dts 里面 TWI0 的具体配置如下:
&twi0 {
clock-frequency = <400000>;
pinctrl-0 = <&twi0_pins_a>;
pinctrl-1 = <&twi0_pins_b>;
pinctrl-names = "default", "sleep";
status = "disabled";
eeprom@50 {
compatible = "atmel,24c16";
reg = <0x50>;
status = "disabled";
};
};
其中,TWI 速率由 “clock-frequency” 属性配置,最大支持 400K。
对于 TWI 设备,可以把设备节点填充作为 Device Tree 中相应 TWI 控制器的子节点。TWI 控制器驱动的 probe 函数透过 of_i2c_register_devices() ,自动展开作为其子节点的 TWI 设备。
对于 twi0 中引用的 pin 口,具体的配置如下:
twi0_pins_a: twi0@0 { pins = "PB10", "PB11"; /*sck sda*/ function = "twi0"; drive-strength = <10>; }; twi0_pins_b: twi0@1 { pins = "PB10", "PB11"; function = "gpio_in"; };
2.3.3 kernel menuconfig 配置
在 longan 中,linux-4.9 在 命 令 行 进 入 内 核 根 目 录 (/kernel/linux-4.9), 执 行 make ARCH=arm64 menuconfig (32 位平台执行:make ARCH=arm menuconfig) 进入配置主界面,并按以下步骤操作 (linux-5.4 在根目录中执行./build.sh menuconfig)在 tina 中,可以直接在根目录里面执行 make kernel_menuconfig 进入 menuconfig 配置界面。
• 1. 选择 Device Drivers 选项进入下一级配置,如下图所示。
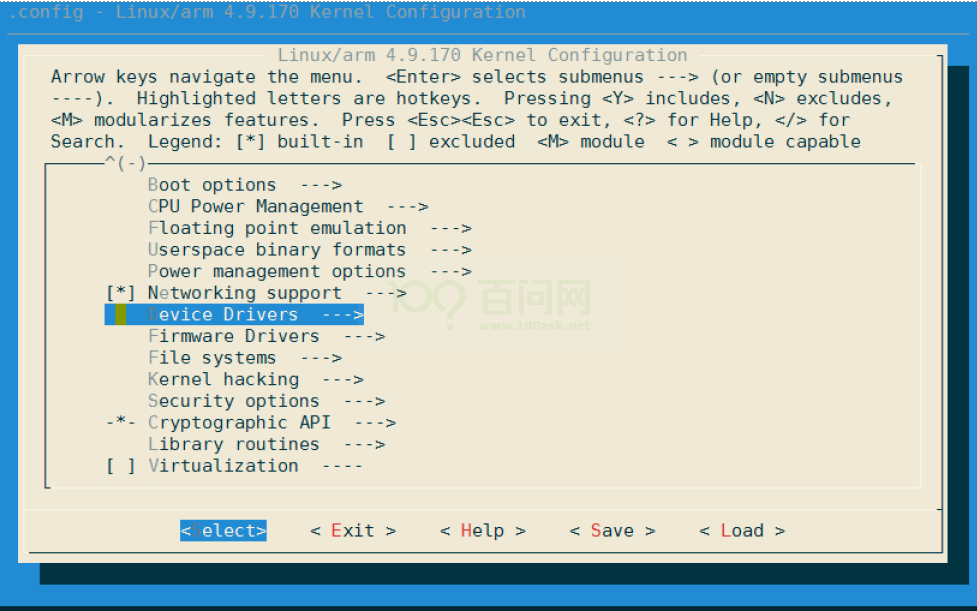
图 2-1: Device Driver
• 2. 选择 I2C support 选项,进入下一级配置,如下图所示。
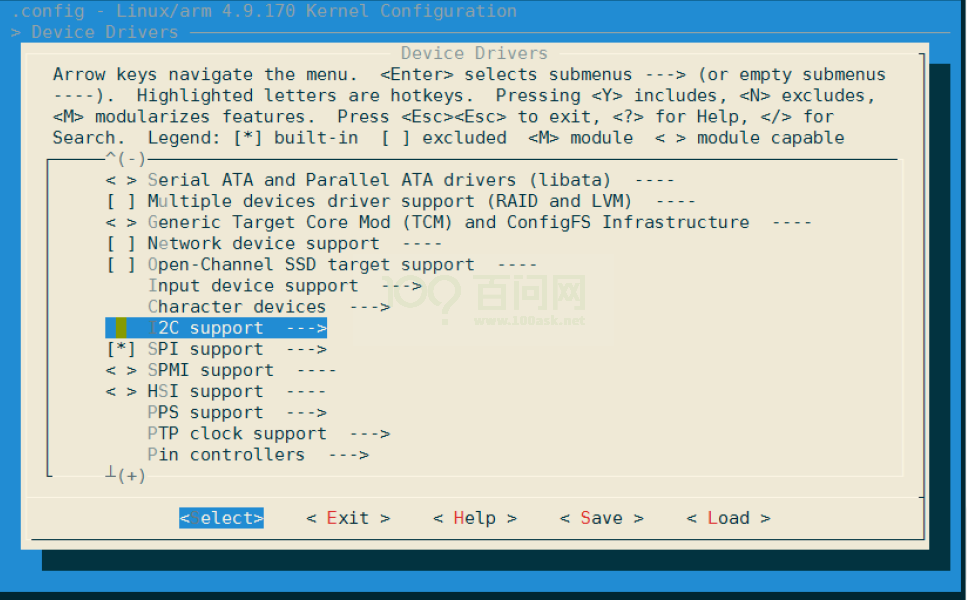
图 2-2: I2C support
• 3. 配置用户 I2C 接口,选择 I2C device interface,如下图所示。
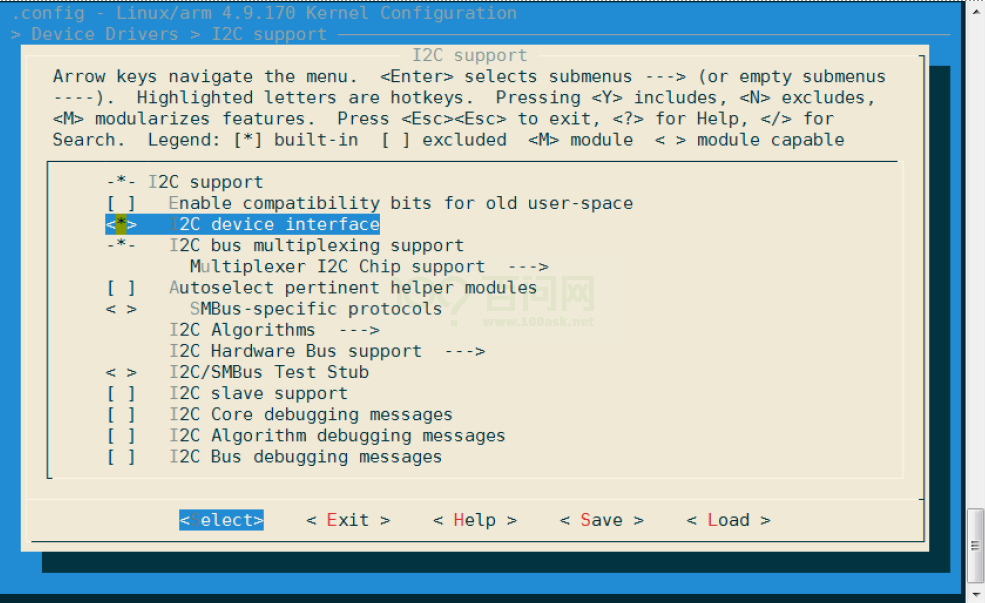
图 2-3: I2C device interface
• 4. 选择 I2C HardWare Bus support 选项,进入下一级配置,如下图所示。
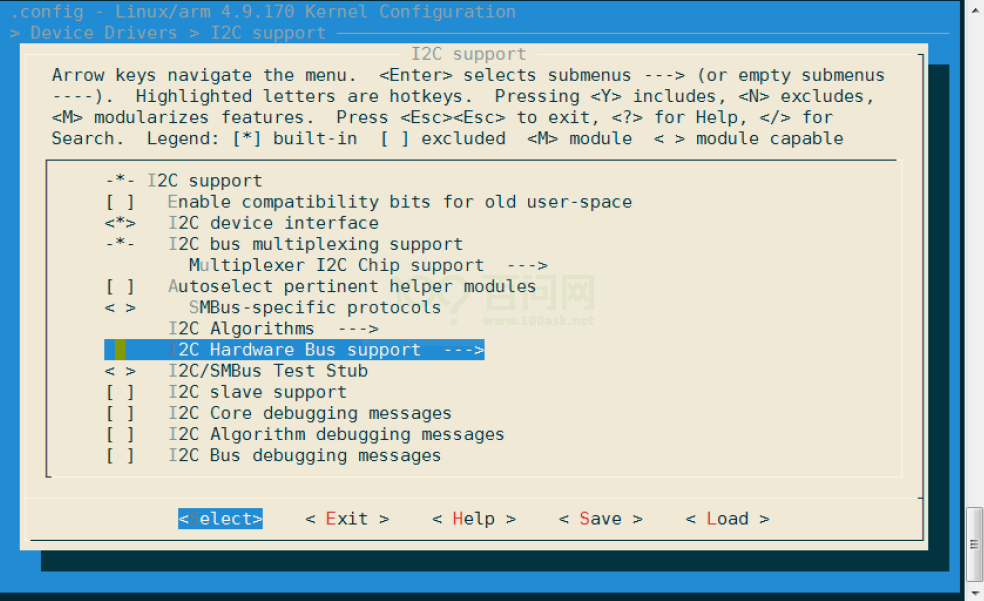
图 2-4: I2C HardWare Bus support
• 5. 选择 SUNXI I2C controller 选项,可选择直接编译进内核,也可编译成模块。如下图所示。
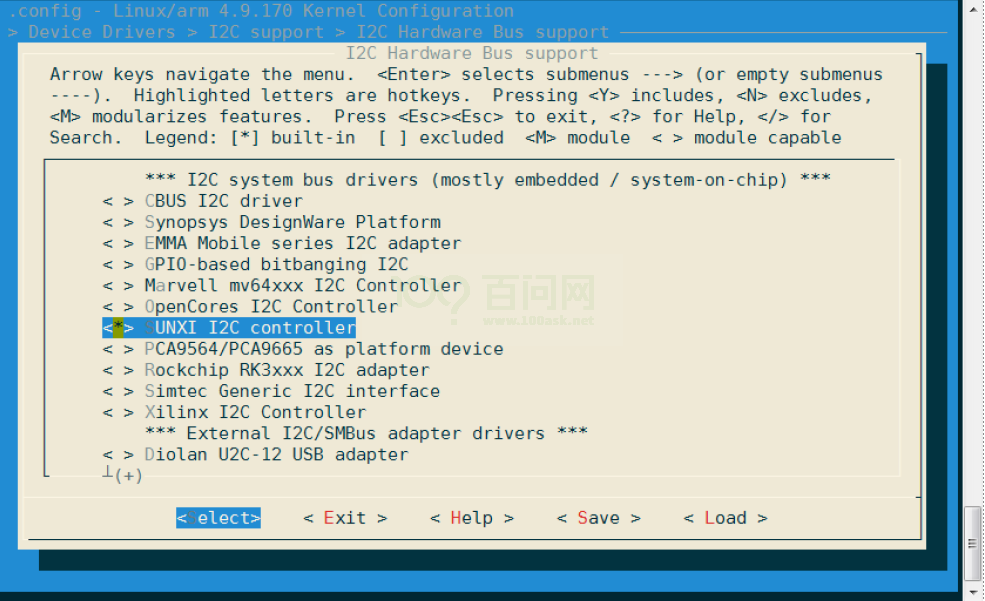
图 2-5: SUNXI I2C controller
2.4 源码模块结构
I2C 总线驱动的源代码位于内核在 drivers/i2c/busses 目录下:
kernel/linux-4.9/drivers/i2c/ ├── busses │ ├── i2c-sunxi.c // Sunxi平台的I2C控制器驱动代码 │ ├── i2c-sunxi.h // 为Sunxi平台的I2C控制器驱动定义了一些宏、数据结构 │ ├── i2c-sunxi-test.c // Sunxi平台的i2c设备测试代码,5.4下暂未适配 ├── i2c-core.c // I2C子系统核心文件,提供相关的接口函数 ├── i2c-dev.c // I2C子系统的设备相关文件,用以注册相关的设备文件,方便调试
2.5 驱动框架介绍
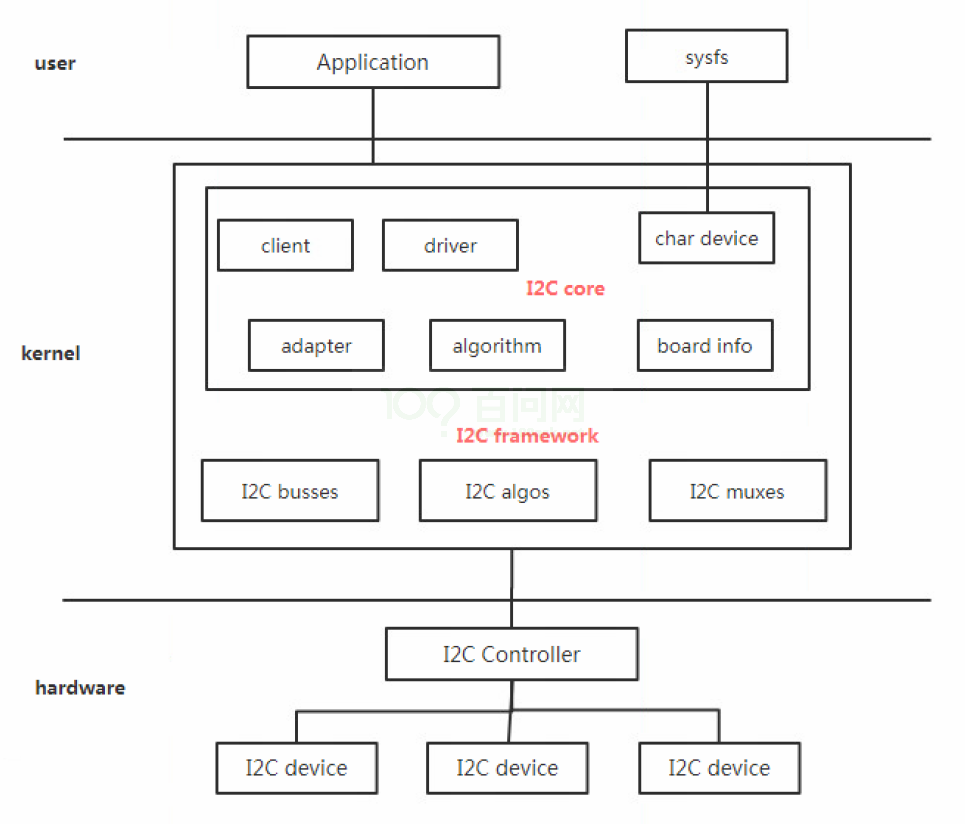
图 2-6: TWI 模块结构框图
Linux 中 I2C 体系结构上图所示,图中用分割线分成了三个层次:1. 用户空间,包括所有使用I2C 设备的应用程序;2. 内核,也就是驱动部分;3. 硬件,指实际物理设备,包括了 I2C 控制器和 I2C 外设。
其中,Linux 内核中的 I2C 驱动程序从逻辑上又可以分为 6 个部分:
I2C framework 提供一种 “访问 I2C slave devices” 的方法。由于这些 slave devices 由I2C controller 控制,因而主要由 I2C controller 驱动实现这一目标。
经过 I2C framework 的抽象,用户可以不用关心 I2C 总线的技术细节,只需要调用系统的接口,就可以与外部设备进行通信。正常情况下,外部设备是位于内核态的其它 driver(如触摸屏,摄像头等等)。I2C framework 也通过字符设备向用户空间提供类似的接口,用户空间程序可以通过该接口访问从设备信息。
在 I2C framework 内部,有 I2C core、I2C busses、I2C algos 和 I2C muxes 四个模块。
I2C core 使用 I2C adapter 和 I2C algorithm 两个子模块抽象 I2C controller 的功能,使用 I2C client 和 I2C driver 抽象 I2C slave device 的功能(对应设备模型中的 device 和 device driver)。另外,基于 I2C 协议,通过 smbus 模块实现 SMBus(System Management Bus,系统管理总线)的功能。
I2C busses 是各个 I2C controller drivers 的集合,位于 drivers/i2c/busses/目录下,i2c-sunxi-test.c、i2c-sunxi.c、i2c-sunxi.h。
I2C algos 包含了一些通用的 I2C algorithm,所谓的 algorithm,是指 I2C 协议的通信方法,用于实现 I2C 的 read/write 指令,一般情况下,都是由硬件实现,不需要特别关注该目录。
3 模块接口说明
3.1 i2c-core 接口
3.1.1 i2c_transfer()
函数原型:int i2c_transfer(struct i2c_adapter *adap, struct i2c_msg *msgs, int num)
作用:完成 I2C 总线和 I2C 设备之间的一定数目的 I2C message 交互。
参数:
adap:指向所属的 I2C 总线控制器;
msgs:i2c_msg 类型的指针;
num:表示一次需要处理几个 I2C msg
返回:
>0:已经处理的 msg 个数;
<0:失败;
3.1.2 i2c_master_recv()
函数原型:int i2c_master_recv(const struct i2c_client *client, char *buf, int count)
作用:通过封装 i2c_transfer() 完成一次 I2c 接收操作。
参数:
client:指向当前 I2C 设备的实例;
buf:用于保存接收到的数据缓存;
count:数据缓存 buf 的长度
返回:
>0:成功接收的字节数;
<0:失败;
3.1.3 i2c_master_send()
函数原型:int i2c_master_send(const struct i2c_client *client, const char *buf, int count)
作用:通过封装 i2c_transfer() 完成一次 I2c 发送操作。
参数:
client:指向当前 I2C 从设备的实例;
buf:要发送的数据;
count:要发送的数据长度
返回:
>0:成功发送的字节数;
<0:失败;
3.1.4 i2c_smbus_read_byte()
函数原型:s32 i2c_smbus_read_byte(const struct i2c_client *client)
作用:从 I2C 总线读取一个字节。(内部是通过 i2c_transfer() 实现,以下几个接口同。)
参数:
client:指向当前的 I2C 从设备
返回:
>0:读取到的数据;
<0:失败;
3.1.5 i2c_smbus_write_byte()
函数原型:s32 i2c_smbus_write_byte(const struct i2c_client *client, u8 value)
作用:从 I2C 总线写入一个字节。
参数:
client:指向当前的 I2C 从设备;
value:要写入的数值
返回:
0:成功;
<0:失败;
3.1.6 i2c_smbus_read_byte_data()
函数原型:s32 i2c_smbus_read_byte_data(const struct i2c_client *client, u8 command)
作用:从 I2C 设备指定偏移处读取一个字节。
参数:
client:指向当前的 I2C 从设备;
command:I2C 协议数据的第 0 字节命令码(即偏移值);
返回:
>0:读取到的数据;
<0:失败;
3.1.7 i2c_smbus_write_byte_data()
函数原型:s32 i2c_smbus_write_byte_data(const struct i2c_client *client, u8 command,u8 value)
作用:从 I2C 设备指定偏移处写入一个字节。
参数:
client:指向当前的 I2C 从设备;
command:I2C 协议数据的第 0 字节命令码(即偏移值);
value:要写入的数值;
返回:
0:成功;
<0:失败;
3.1.8 i2c_smbus_read_word_data()
函数原型:s32 i2c_smbus_read_word_data(const struct i2c_client *client, u8 command)
作用:从 I2C 设备指定偏移处读取一个 word 数据(两个字节,适用于 I2C 设备寄存器是 16 位的情况)。
参数:
client:指向当前的 I2C 从设备;
command:I2C 协议数据的第 0 字节命令码(即偏移值);
返回:
>0:读取到的数据;
<0:失败;
3.1.9 i2c_smbus_write_word_data()
函数原型:s32 i2c_smbus_write_word_data(const struct i2c_client *client, u8 command,u16 value)
作用:从 I2C 设备指定偏移处写入一个 word 数据(两个字节)。
参数:
client:指向当前的 I2C 从设备;
command:I2C 协议数据的第 0 字节命令码(即偏移值);
value:要写入的数值
返回:
0:成功;
<0:失败;
3.1.10 i2c_smbus_read_block_data()
函数原型:s32 i2c_smbus_read_block_data(const struct i2c_client *client, u8 command,u8 *values)
作用:从 I2C 设备指定偏移处读取一块数据。
参数:
client:指向当前的 I2C 从设备;
command:I2C 协议数据的第 0 字节命令码(即偏移值);
values:用于保存读取到的数据;
返回:
>0:读取到的数据长度;
<0:失败;
3.1.11 i2c_smbus_write_block_data()
函数原型:s32 i2c_smbus_write_block_data(const struct i2c_client *client, u8 command,u8 length, const u8 *values)
作用:从 I2C 设备指定偏移处写入一块数据(长度最大 32 字节)。
参数:
client:指向当前的 I2C 从设备;
command:I2C 协议数据的第 0 字节命令码(即偏移值);
length:要写入的数据长度;
values:要写入的数据;
返回:
0:成功;
<0:失败;
3.2 i2c 用户态调用接口
i2c 的操作在内核中是当做字符设备来操作的,可以通过利用文件读写接口(open,write,read,ioctrl)等操作内核目录中的/dev/i2c-* 文件来条用相关的接口,i2c 相关的操作定义在i2c-dev.c 里面,本节将介绍比较重要的几个接口:
3.2.1 i2cdev_open()
函数原型:static int i2cdev_open(struct inode *inode, struct file *file)
作用:程序(C 语言等)使用 open(file) 时调用的函数。打开一个 i2c 设备,可以像文件读写的方式往 i2c 设备中读写数据
参数:
inode:inode 节点;
file:file 结构体;
返回:文件描述符
3.2.2 i2cdev_read()
函数原型:static ssize_t i2cdev_read(struct file *file, char __user *buf, size_t count,loff_t *offset)
作用:程序(C 语言等)调用 read() 时调用的函数。像往文件里面读数据一样从 i2c 设备中读数据。底层调用 i2c_xfer 传输数据
参数:
file:file 结构体;
buf,写数据 buf;
offset, 文件偏移。
返回:
非空:返回读取的字节数;
<0:失败;
3.2.3 i2cdev_write()
函数原型:static ssize_t i2cdev_write(struct file *file, const char __user *buf,size_t count, loff_t *offset)
作用:程序(C 语言等)调用 write() 时调用的函数。像往文件里面写数据一样往 i2c 设备中写数据。底层调用 i2c_xfer 传输数据
参数:
file:file 结构体;
buf:读数据 buf;
offset, 文件偏移。
返回:
0:成功;
<0:失败;
3.2.4 i2cdev_ioctl()
函数原型:static long i2cdev_ioctl(struct file *file, unsigned int cmd, unsigned long arg)
作用:程序(C 语言等)调用 ioctl() 时调用的函数。像对文件管理 i/o 一样对 i2c 设备管理。该功能比较强大,可以修改 i2c 设备的地址,往 i2 设备里面读写数据,使用 smbus 等等,详细的可以查阅该函数。
参数:
file:file 结构体;
cmd:指令;
arg:其他参数。
返回:
0:成功;
<0:失败;
4 模块使用范例
4.1 利用 i2c-core 接口读写 TWI 设备
在内核源码中有现成的 i2c 设备驱动实例:tina/lichee/kernel/linux-5.4/drivers/misc/eeprom/at24.c, 这是一个 EEPROM 的 I2C 设备驱动,为了验证 I2C 总线驱动,所以其中通过 sysfs 节点实现读写访问。下面对这个文件的一些关键点进行展示介绍:
#include #include #include #include #include #include #include #include #include #include #include #include #include #include #include #include #include #define EEPROM_ATTR(_name) { .attr = { .name = #_name,.mode = 0444 }, .show = _name_00_show, } struct i2c_client *this_client; static const struct i2c_device_id at24_ids[] = { { "24c16", 0 }, { /* END OF LIST */ } }; MODULE_DEVICE_TABLE(i2c, at24_ids); static int eeprom_i2c_rxdata(char *rxdata, int length) { int ret; struct i2c_msg msgs[] = { { .addr = this_client->addr, .flags = 0, .len = 1, .buf = &rxdata[0], }, { .addr = this_client->addr, .flags = I2C_M_RD, .len = length, .buf = &rxdata[1], }, }; ret = i2c_transfer(this_client->adapter, msgs, 2); if (ret < 0) pr_info("%s i2c read eeprom error: %dn", __func__, ret); return ret; } static int eeprom_i2c_txdata(char *txdata, int length) { int ret; struct i2c_msg msg[] = { { .addr = this_client->addr, .flags = 0, .len = length, .buf = txdata, }, }; ret = i2c_transfer(this_client->adapter, msg, 1); if (ret < 0) pr_err("%s i2c write eeprom error: %dn", __func__, ret); return 0; } static ssize_t read_show(struct kobject *kobj, struct kobj_attribute *attr, char *buf) { int i; u8 rxdata[4]; rxdata[0] = 0x1; eeprom_i2c_rxdata(rxdata, 3); for(i=0;i<4;i++) printk("rxdata[%d]: 0x%xn", i, rxdata[i]); return sprintf(buf, "%sn", "read end!"); } static ssize_t write_show(struct kobject *kobj, struct kobj_attribute *attr, char *buf) { int i; static u8 txdata[4] = {0x1, 0xAA, 0xBB, 0xCC}; for(i=0;i<4;i++) printk("txdata[%d]: 0x%xn", i, txdata[i]); eeprom_i2c_txdata(txdata,4); txdata[1]++; txdata[2]++; txdata[3]++; return sprintf(buf, "%sn", "write end!"); } static struct kobj_attribute read = EEPROM_ATTR(read); static struct kobj_attribute write = EEPROM_ATTR(write); static const struct attribute *test_attrs[] = { &read.attr, &write.attr, NULL, }; static int at24_probe(struct i2c_client *client, const struct i2c_device_id *id) { int err; this_client = client; printk("1..at24_probe n"); err = sysfs_create_files(&client->dev.kobj,test_attrs); printk("2..at24_probe n"); if(err){ printk("sysfs_create_files failedn"); } printk("3..at24_probe n"); return 0; } static int at24_remove(struct i2c_client *client) { return 0; } static struct i2c_driver at24_driver = { .driver = { .name = "at24", .owner = THIS_MODULE, }, .probe = at24_probe, .remove = at24_remove, .id_table = at24_ids, }; static int __init at24_init(void) { printk("%s %dn", __func__, __LINE__); return i2c_add_driver(&at24_driver); } module_init(at24_init); static void __exit at24_exit(void) { printk("%s()%d - n", __func__, __LINE__); i2c_del_driver(&at24_driver); } module_exit(at24_exit);
4.2 利用用户态接口读写 TWI 设备
如果配置了 i2c devices interface,可以直接利用文件读写函数来操作 I2C 设备。下面这个程序直接读取 /dev/i2c-* 来读写 i2c 设备:
#include #include #include #include #define CHIP "/dev/i2c-1" #define CHIP_ADDR 0x50 int main() { unsigned char rddata; unsigned char rdaddr[2] = {0, 0}; /* 将要读取的数据在芯片中的偏移量 */ unsigned char wrbuf[3] = {0, 0, 0x3c}; /* 要写的数据,头两字节为偏移量 */ printf("hello, this is i2c testern"); int fd = open(CHIP, O_RDWR); if (fd < 0) { printf("open "CHIP"failedn"); goto exit; } if (ioctl(fd, I2C_SLAVE_FORCE, CHIP_ADDR) < 0) { /* 设置芯片地址 */ printf("oictl:set slave address failedn"); goto close; } printf("input a char you want to write to E2PROMn"); wrbuf[2] = getchar(); printf("write return:%d, write data:%xn", write(fd, wrbuf, 3), wrbuf[2]); sleep(1); printf("write address return: %dn",write(fd, rdaddr, 2)); /* 读取之前首先设置读取的偏移量 */ printf("read data return:%dn", read(fd, &rddata, 1)); printf("rddata: %cn", rddata); close(fd); exit: return 0; }
5 FAQ
5.1 调试方法
5.1.1 调试工具
5.1.1.1 i2c-tools 调试工具
i2c-tools 是一个开源工具,专门用来调试 I2C 设备。可以用 i2c-tools 来获取 i2c 设备的相关信息(默认集成在内核里面),并且读写相关的 i2c 设备的数据。i2c-tools 主要是通过读写/dev/i2c-* 文件获取 I2C 设备,所以需要在 kernel/linux-4.9 的 menuconfig 里面把 I2C的 device interface 节点打开,具体的 i2c-tools 使用方法如下。
i2cdetect -l //获取i2c设备信息 i2cdump -y i2c-number i2c-reg //把相关的i2c设备数据dump出来,如i2cdump -y 1 0x50 i2cget -y i2c-number i2c-reg data_rege //读取i2c设备某个地址的数据,如i2cget -y 1 0x50 1 i2cset -y i2c-number i2c-reg data_rege data //往i2c设备某个地址写数据,如i2cset -y 1 0x50 1 1
5.1.2 调试节点
5.1.2.1 /sys/module/i2c_sunxi/parameters/transfer_debug
此节点文件的功能是打开某个 TWI 通道通信过程的调试信息。缺省值是-1,不会打印任何通道的通信调试信息。
打开通道 x 通信过程调试信息的方法:
echo x > /sys/module/i2c_sunxi/parameters/transfer_debug
关闭通信过程调试信息的方法:
echo -1 > /sys/module/i2c_sunxi/parameters/transfer_debug
5.1.2.2 /sys/devices/soc.2/1c2ac00.twi.0/info
此节点文件可以打印出当前 TWI 通道的一些硬件资源信息。
cat /sys/devices/soc.2/1c2ac00.twi.0/info
5.1.2.3 /sys/devices/soc.2/1c2ac00.twi/status
此节点文件可以打印出当前 TWI 通道的一些运行状态信息,包括控制器的各寄存器值。
cat /sys/devices/soc.2/1c2ac00.twi/status
5.2 常见问题
5.2.1 TWI 数据未完全发送
问题现象:incomplete xfer。具体的 log 如下所示:
[ 1658.926643] sunxi_i2c_do_xfer()1936 - [i2c0] incomplete xfer (status: 0x20, dev addr: 0x50) [ 1658.926643] sunxi_i2c_do_xfer()1936 - [i2c0] incomplete xfer (status: 0x48, dev addr: 0x50)
问题分析:此错误表示主控已经发送了数据(status 值为 0x20 时,表示发送了 SLAVE ADDR + WRITE;status 值为 0x48 时,表示发送了 SLAVE ADDR + READ),但是设备没有回ACK,这表明设备无响应,应该检查是否未接设备、接触不良、设备损坏和上电时序不正确导致的设备未就绪等问题。
问题排查步骤:
• 步骤 1:通过设备树里面的配置信息,核对引脚配置是否正确。每组 TWI 都有好几组引脚配置。
• 步骤 2:更换 TWI 总线下的设备为 at24c16,用 i2ctools 读写 at24c16 看看是否成功,成功则表明总线工作正常。
• 步骤 3:排查设备是否可以正常工作以及设备与 I2C 之间的硬件接口是否完好。
• 步骤 4:详细了解当前需要操作的设备的初始化方法,工作时序,使用方法,排查因初始化设备不正确导致通讯失败。
• 步骤 5:用示波器检查 TWI 引脚输出波形,查看波形是否匹配。
5.2.2 TWI 起始信号无法发送
问题现象:START can’t sendout!。具体的 log 如下所示:
sunxi_i2c_do_xfer()1865 - [i2c1] START can't sendout!
问题分析:此错误表示 TWI 无法发送起始信号,一般跟 TWI 总线的引脚配置以及时钟配置有关。应该检查引脚配置是否正确,时钟配置是否正确,引脚是否存在上拉电阻等等。
问题排查步骤:
• 步骤 1:重新启动内核,通过查看 log,分析 TWI 是否成功初始化,如若存在引脚配置问题,应核对引脚信息是否正确。
• 步骤 2:根据原理图,查看 TWI-SCK 和 TWI-SDA 是否经过合适的上拉电阻接到 3.3v 电压。
• 步骤 3:用万用表量 SDA 与 SCL 初始电压,看电压是否在 3.3V 附近(断开此 TWI 控制器所有外设硬件连接与软件通讯进程)。
• 步骤 4:核查引脚配置以及 clk 配置是否进行正确设置。
• 步骤 5:测试 PIN 的功能是否正常,利用寄存器读写的方式,将 PIN 功能直接设为 INPUT 功能(echo [reg] [val] > /sys/class/sunxi_dump/write),然后将 PIN 上拉和接地改变 PIN状态,读 PIN 的状态 (echo [reg,reg] > /sys/class/sunxi_dump/dump;cat dump),看是否匹配。
• 步骤 6:测试 CLK 的功能是否正常,利用寄存器读写的方式,将 TWI 的 CLK gating 等打开,(echo [reg] [val] > /sys/class/sunxi_dump/write),然后读取相应 TWI 的寄存器信息,读 TWI 寄存器的数据(echo [reg] ,[len]> /sys/class/sunxi_dump/dump),查看寄存器数据是否正常。
5.2.3 TWI 终止信号无法发送
问题现象:STOP can’t sendout。具体的 log 如下所示:
twi_stop()511 - [i2c4] STOP can't sendout! sunxi_i2c_core_process()1726 - [i2c4] STOP failed!
问题分析:此错误表示 TWI 无法发送终止信号,一般跟 TWI 总线的引脚配置。应该检查引脚配置是否正确,引脚电压是否稳定等等。
问题排查步骤:
• 步骤 1:根据原理图,查看 TWI-SCK 和 TWI-SDA 是否经过合适的上拉电阻接到 3.3v 电压。
• 步骤 2:用万用表量 SDA 与 SCL 初始电压,看电压是否在 3.3V 附近(断开此 TWI 控制器所有外设硬件连接与软件通讯进程)。
• 步骤 3:测试 PIN 的功能是否正常,利用寄存器读写的方式,将 PIN 功能直接设为 INPUT 功能(echo [reg] [val] > /sys/class/sunxi_dump/write),然后将 PIN 上拉和接地改变 PIN状态,读 PIN 的状态 (echo [reg,reg] > /sys/class/sunxi_dump/dump;cat dump),看是否匹配。
• 步骤 4: 查看设备树配置,把其他用到 SCK/SDA 引脚的节点关闭,重新测试 I2C 通信功能。
5.2.4 TWI 传送超时
问题现象:xfer timeout。具体的 log 如下所示:
[123.681219] sunxi_i2c_do_xfer()1914 - [i2c3] xfer timeout (dev addr:0x50)
问题分析: 此错误表示主控已经发送完起始信号,但是在与设备通信的过程中无法正常完成数据发送与接收,导致最终没有发出终止信号来结束 I2C 传输,导致的传输超时问题。应该检查引脚配置是否正常,CLK 配置是否正常,TWI 寄存器数据是否正常,是否有其他设备干扰,中断是否正常等问题。
问题排查步骤:
• 步骤 1:核实 TWI 控制器配置是否正确。
• 步骤 2:根据原理图,查看 TWI-SCK 和 TWI-SDA 是否经过合适的上拉电阻接到 3.3v 电压。
• 步骤 3:用万用表量 SDA 与 SCL 初始电压,看电压是否在 3.3V 附近(断开此 TWI 控制器所有外设硬件连接与软件通讯进程)。
• 步骤 4:关闭其他 TWI 设备,重新进行烧录测试 TWI 功能是否正常。
• 步骤 4:测试 PIN 的功能是否正常,利用寄存器读写的方式,将 PIN 功能直接设为 INPUT 功能(echo [reg] [val] > /sys/class/sunxi_dump/write),然后将 PIN 上拉和接地改变 PIN状态,读 PIN 的状态 (echo [reg,reg] > /sys/class/sunxi_dump/dump;cat dump),看是否匹配。
• 步骤 5:测试 CLK 的功能是否正常,利用寄存器读写的方式,将 TWI 的 CLK gating 等打开,(echo [reg] [val] > /sys/class/sunxi_dump/write),然后读取相应 TWI 的寄存器信息,读 TWI 寄存器的数据(echo [reg] ,[len]> /sys/class/sunxi_dump/dump),查看寄存器数据是否正常。
• 步骤 7:根据相关的 LOG 跟踪 TWI 代码执行流程,分析报错原因。
-
【北京迅为】itop-龙芯2k1000开发指南Linux基础入门vim 编辑器2024-10-25 1396
-
Rockchip Linux SDK uboot logo开发指南2023-10-09 926
-
Linux NOR开发指南2023-03-06 2568
-
Tina_Linux_系统软件开发指南2023-03-02 5023
-
nRF52832开发指南-上册2022-06-16 2027
-
迅为RK3399开发板嵌入式linux开发指南2021-11-01 2228
-
Rockchip Linux SDK的开发指南的详细资料说明2020-01-10 2485
-
Linux的平台下Mini210S裸机程序开发指南2017-10-29 1728
-
EAC0945 linux开发指南2017-09-28 2395
-
彩光灯开发指南2016-12-29 952
-
A64开发板LCD开发指南2016-06-21 1189
-
linux驱动开发指南基于arm9处理器2013-08-13 4076
-
Tiny6410 Linux开发指南详解2011-07-08 2110
全部0条评论

快来发表一下你的评论吧 !
