

运动控制系统设计的两种控制结构解析
工业控制
描述
运动控制往往是针对产品而言的,包含机械、软件、电气等模块,例如机器人、无人机、运动平台等等,是对机械运动部件的位置、速度等进行实时的控制管理,使其按照预期的运动轨迹和规定的运动参数进行运动的一种控制。在运动控制系统的设计中,主要使用了两种控制结构:集中式和分布式。
高速、低成本的数字控制网络的引入,为建造分布式控制系统提供了新的选择。随着具有更高功率、更紧凑的开关放大器的出现,集中化设计使得在同一块印刷电路板上可以布置的控制器数量正在逐步增加。
了解这些技术发展趋势,有助于解释如何以及在什么时候,应用这两种不同的控制结构。
运动控制应用的类型
集中式还是分布式,哪种控制方式更合适:应用控制问题的特性对其具有决定性的影响。
在平面运动控制应用领域,马达的控制或多或少的由集中式PC或控制器完成;也有一些分层应用领域,运动轴被分成2、3组或者更多的功能轴;也有一些单机应用的场合,机床控制器的运行在很大程度上没有与网络连接,不依赖网络的监视。
平面运动控制的例子:具有多个转轴的印刷机,它的转轴受伺服控制器的控制。在这里,时间是关键因素。主控制器,通常是PC或者是PLC,必须同步驱动所有的轴。典型的指令为:“移动轴#1到位置X,移动轴#2到位置Y”等等。
分级运动控制应用的例子:半导体晶圆处理系统,该系统具有一个主机器人(4轴)、晶圆定位器(3轴)和一个阀门控制器(1或2轴)。在这种结构下,网络一般将就地机器人或者阀门控制器连接至中心网络,但是实际的运动控制由就地机器人、晶圆定位器或者阀门完成。总的机器控制器不会发出类似“将机器轴#2移动到位置12345”的指令,而是给出诸如“伸展机械臂”的指令,该指令由就地机器人控制器来解释和执行。
单机应用的例子:磁带存档系统,该系统允许操作人员走近控制台,要求检索特定的磁带。这些单机控制器,能够执行一揽子的机械臂运动,该运动基于就地人员发出的指令,如“检索磁带#1234”。在该应用中,如果连接了网络,那只是用其实现报告和监视功能,并不是用于控制本身。
增加分布式运动驱动器
了解哪些实际设备可以用于运动控制系统同样十分重要。两个可用的设备是:分布式驱动器和运动控制卡。尽管这些设备有很多不同的变体,但是归纳起来,它们都是上述两种设备中的一种。
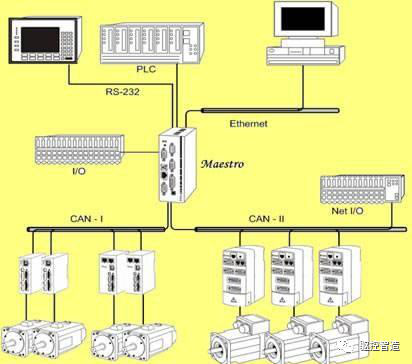
分布式运动控制器驱动器,有时也被称为智能放大器,通过网络与中心主机通讯,提供一套运动控制功能,比如产生轮廓、回路闭合或者是放大功能。
根据应用的不同,有两种分布式驱动可供使用。第一种,可称之为紧耦合驱动,应用诸如SERCOS、EtherCAT、或EthernetPOWERLINK等高速、确定性的网络。第二种,可称之为松耦合驱动,使用诸如以太网协议、CAN总线和RS485等低速网络。
紧耦合驱动需要使用运动卡或者通过PC运行专用软件,来同步和协调各个轴的运动。每个驱动器可接收位置和速度的更新信息,其更新速率可达每秒钟数千次。松耦合驱动也是由主机控制,但是驱动器承担更强大的仿形切削,同时也具有更大的延迟。将类似于“利用点到点S型曲线,将轴移动到位置X”的指令,发送给每个驱动器。这些驱动器内的交互倾向于自动化,利用就地传感器的输入来启动或停止运动。
运动控制卡
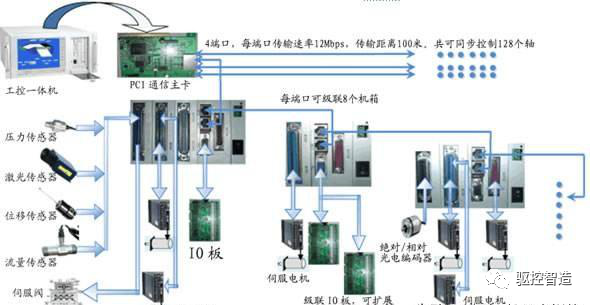
运动控制卡是分布式驱动最主要的替代品。主要区别是:运动控制卡通过背板总线与分散的主板或处理器卡连接起来。但是在这里,我们将单机单卡控制器和背板运动控制卡称为机器控制器卡。
在运动控制器方案中,微处理器中有应用代码,运动控制器IC(运动处理器)用于产生轮廓、伺服回路闭合以及管理轴控制中的对时间要求比较严格的元素。机器应用的微处理器和运动处理器可以为同一个,尤其是对那些简单的控制应用而言。机器控制器卡的优势之一是可维护性更好,这是因为维修整个控制器卡,就是更换卡件。由于放大器布置在卡件上,接线也减少了。还可根据实际应用对卡件的实体尺寸以及接头进行裁剪。
运动控制卡有两种不同的类型:成品的和客户定制的。成品卡,尤其是总线连接的运动卡,存在已经很长时间了,有很多供应商可供选择。客户定制卡,尽管需要更多的设计工作,也是一种很好的选择。有个重要的发展趋势就是将放大器(IC或者基于模块的)集成到卡件上。另外一个趋势是利用基于IC的成品运动控制器,提供轮廓产生、伺服回路闭合、通讯以及时间关键功能,比如自动安全响应、程控中断以及其它类型的自动运动轴管理。
编辑:黄飞
-
开环控制系统与闭环控制系统的区别2024-06-13 17687
-
运动控制系统由什么组成2024-06-12 3730
-
运动控制系统是什么?什么是运动控制系统?2023-10-25 3773
-
运动控制系统的核心应用2023-07-07 3887
-
运动控制系统是什么2023-04-21 2545
-
什么是运动控制系统?运动控制系统的任务是什么?2021-10-29 4816
-
运动控制系统的基本方程2021-09-15 1744
-
一个基于Platinum Maestro的运动控制系统的软件结构2021-09-14 1378
-
求一种工业运动控制系统方案2021-09-07 1892
-
什么是运动控制系统2021-09-01 1509
-
怎么设计悬挂运动控制系统?2019-08-12 1997
-
一种流量比值控制系统设计剖析2019-04-28 4833
-
运动控制系统的定义与机电系统运动控制教程分享2017-11-09 1628
-
试验车运动控制系统2009-06-16 610
全部0条评论

快来发表一下你的评论吧 !
