

基于Lü系统的构造混沌机器人系统参数值综合选择策略
机器人
554人已加入
描述
作者:李彩虹,刘聪,宋勇,***1
单位: 山东理工大学计算机科学与技术学院,中国淄博市,255000 2山东大学(威海)机电与信息工程学院,中国威海市,264209
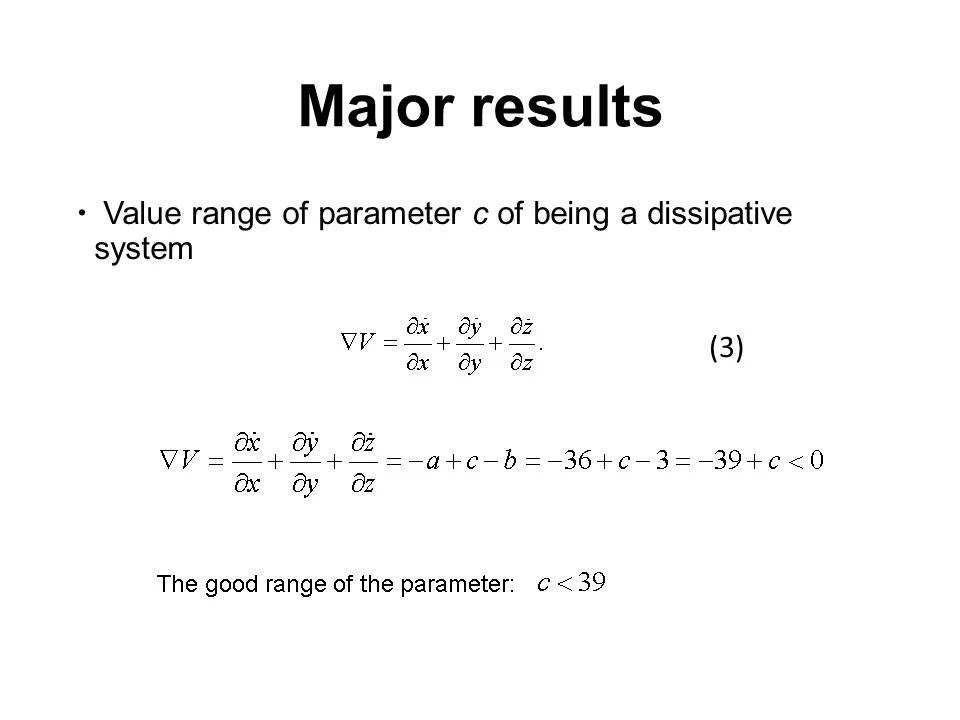
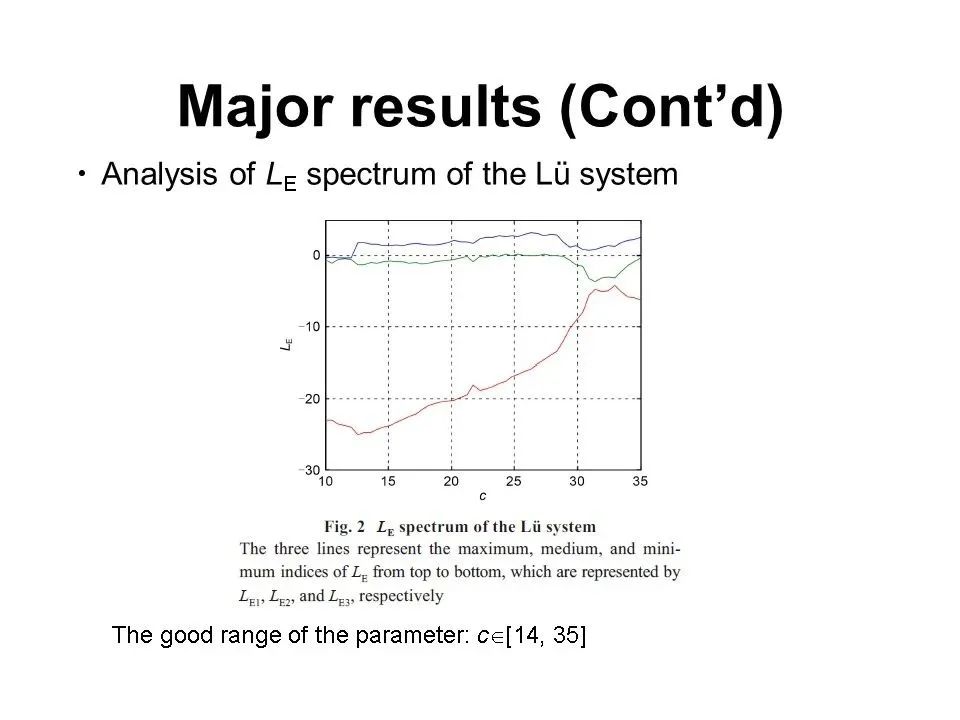
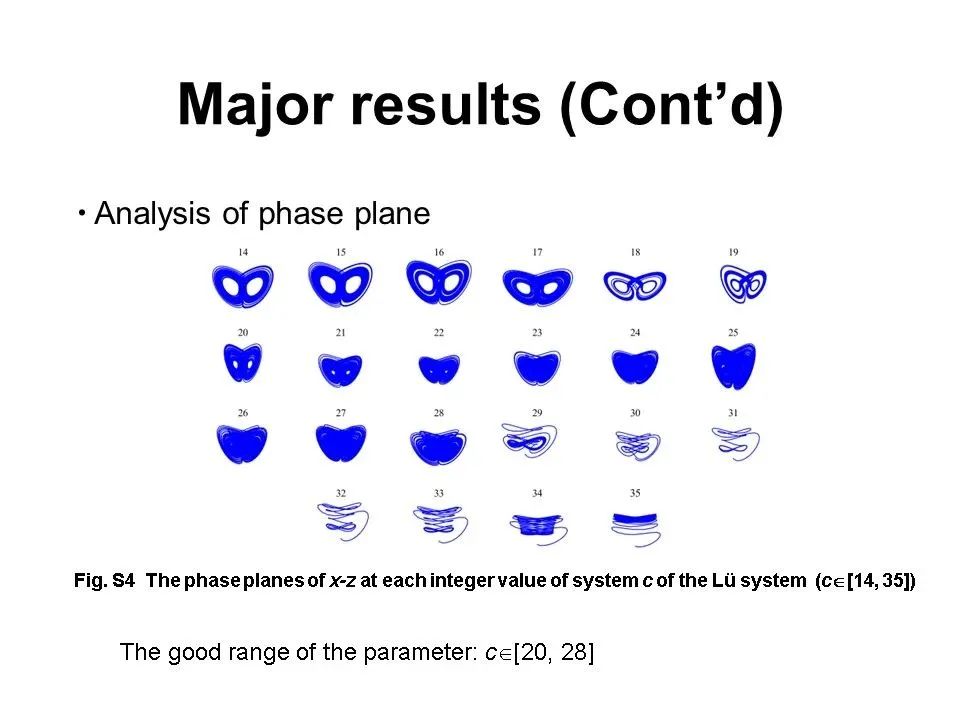
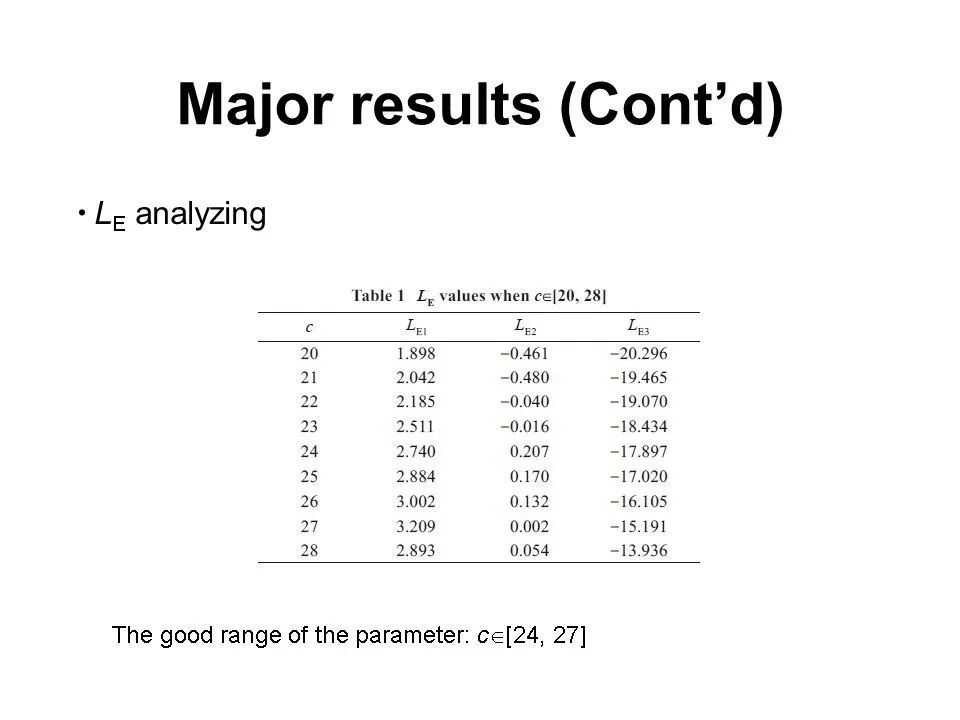
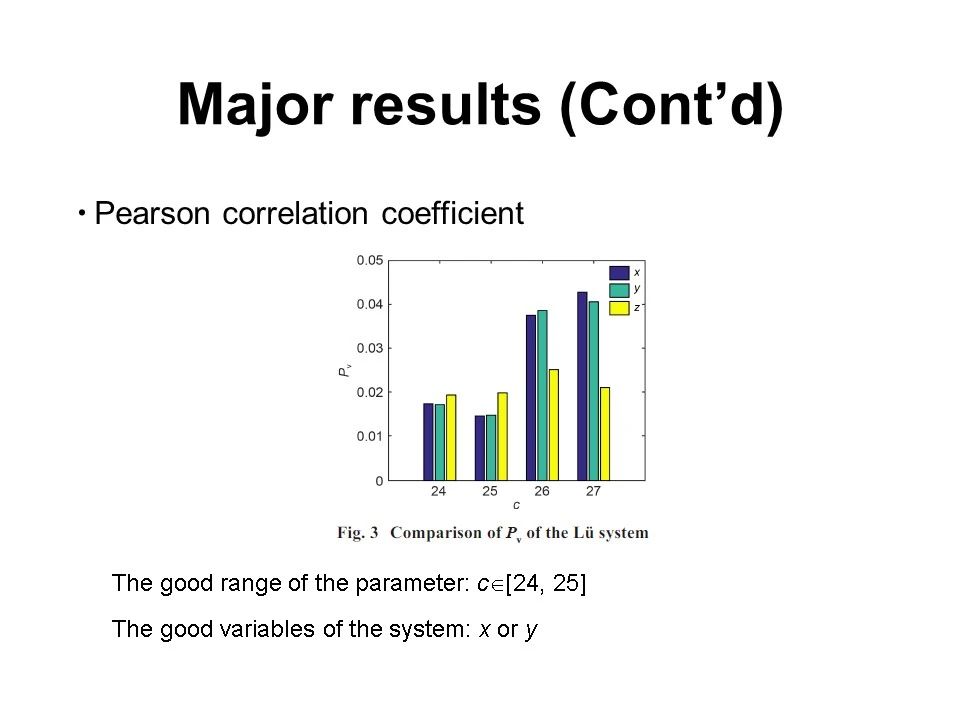
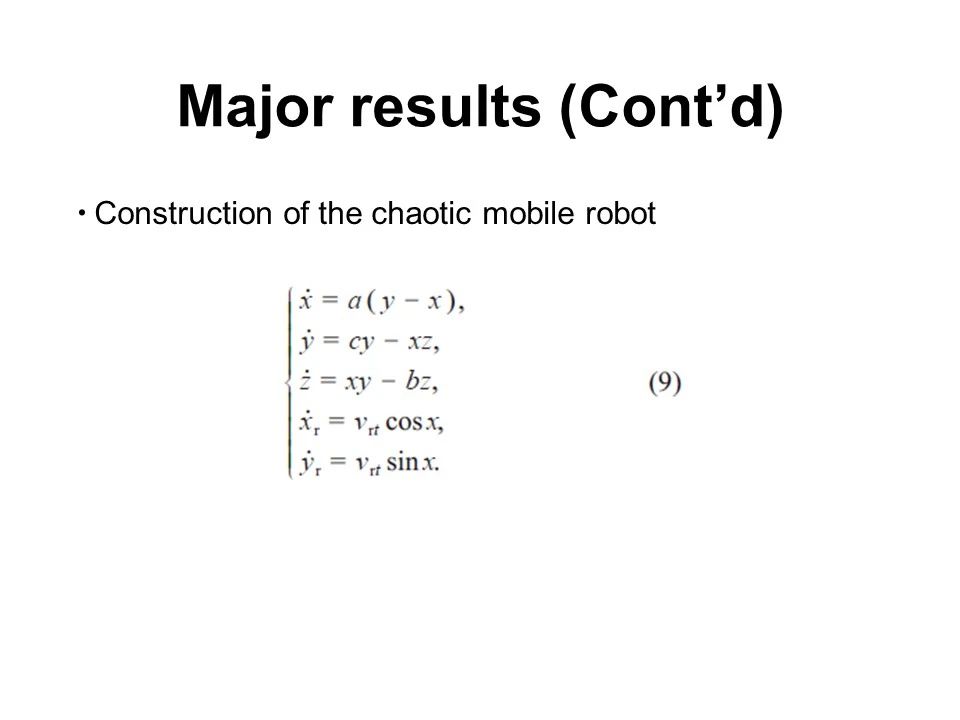
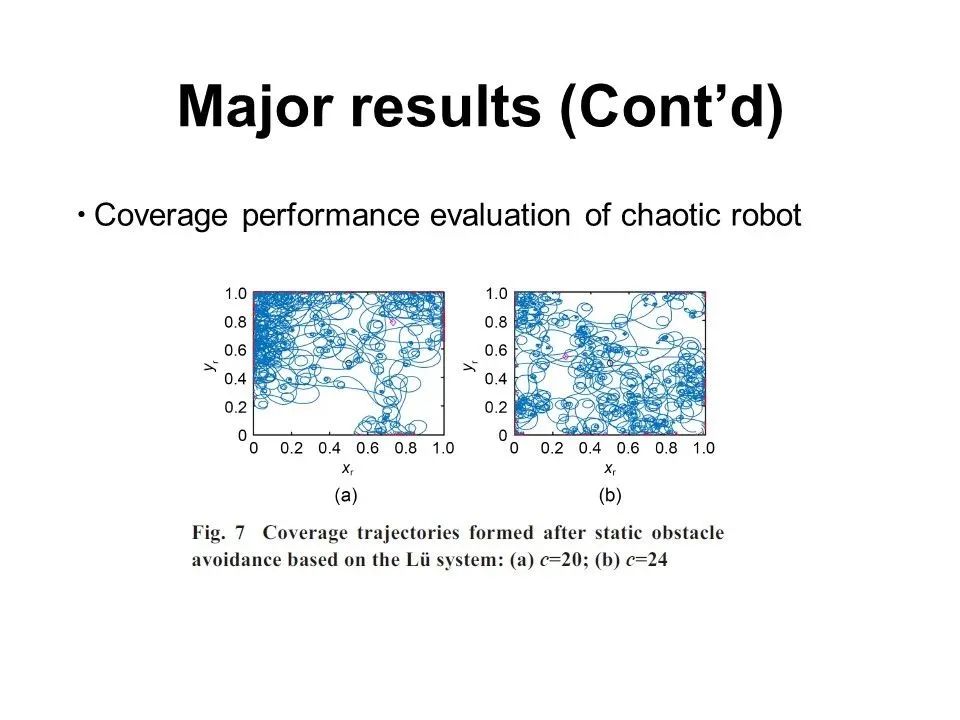
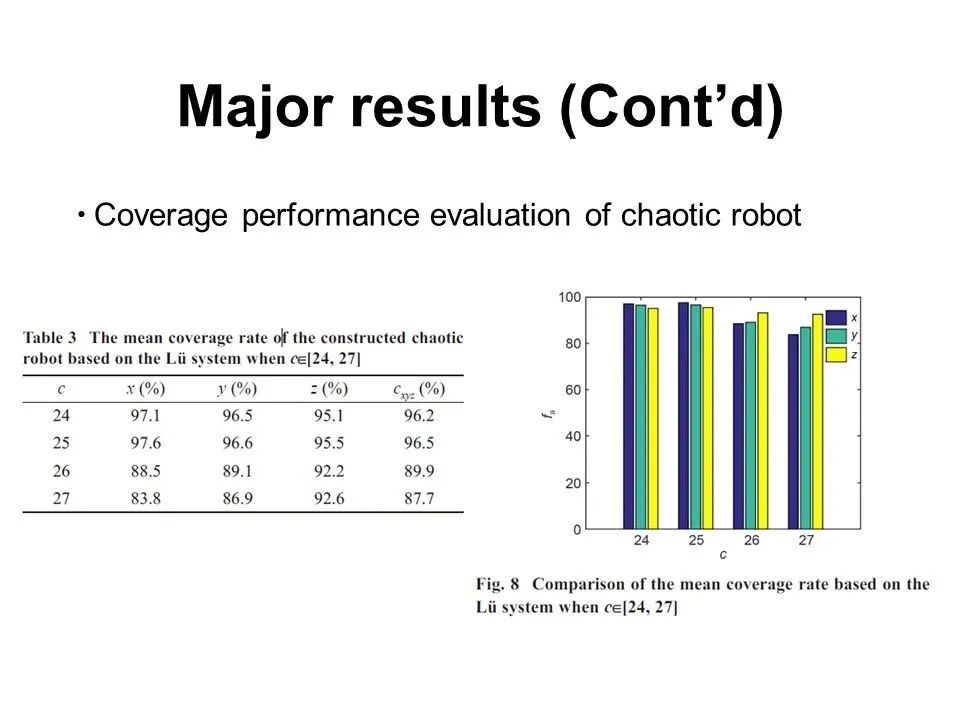
针对移动机器人完成特殊情况下的全覆盖路径规划(complete coverage path planning, CCPP)任务,基于Lü系统,提出一种构造混沌机器人的系统参数值综合选择策略,以满足特殊任务下遍历轨迹高随机性和高覆盖率的需求。首先利用混沌系统必为耗散系统的特点,大致确定Lü系统成为耗散系统的参数取值范围;然后计算耗散系统下的李雅普诺夫指数谱,缩小系统参数的取值范围;其次画出这些参数下的相平面,大致判断其轨迹的拓扑分布特性;进一步在好的参数取值里,计算每个参数下变量的皮尔逊相关系数,判断每个变量的随机特性。最后,在所确定参数值下,利用其中的变量构造混沌机器人,并仿真测试了覆盖率,研究覆盖率和变量随机特性之间的关系。上述综合选择策略根据覆盖轨迹混沌性和随机性的要求,逐渐缩小了系统参数的取值范围。与使用一组固定的经典参数值的Lü系统相比,经过综合方法选择参数值的系统,能挑选出李雅普诺夫指数大的变量来构造混沌机器人,从而使覆盖轨迹的随机性能更高。另一个混沌Lorenz系统,用来测试和验证所设计策略的可行性和有效性。此类研究能够提高机器人完成特殊情况下CCPP任务的效率。
编辑:黄飞
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
- 相关推荐
- 热点推荐
- 移动机器人
-
LabVIEW的六轴工业机器人运动控制系统2023-12-21 3996
-
YAMAHA机器人 RCX240控制柜参数2021-11-05 3652
-
什么是机器人控制系统2021-10-11 3667
-
一个描述机器人刚体动力学的系统模型2021-09-15 1382
-
机器人的控制系统2021-09-13 1983
-
机器人系统与控制需求简介2021-09-08 2359
-
ZNL-IR03工业机器人综合实训平台有哪些技术参数2021-08-16 2105
-
工业机器人综合实训平台实验2021-07-01 2847
-
服务机器人的视觉系统怎么设计?2020-04-07 3488
-
机器人系统是什么?2019-09-10 3377
-
《机器人设计与实现》——低成本DIY机器人,一本机器人制作的经典入门书2017-08-01 195413
-
机器人系统程序应怎样选择算法?2013-06-05 2036
全部0条评论

快来发表一下你的评论吧 !
