

2相和5相步进电机比较
工业控制
描述
2 相和 5 相步进电机比较
您已将运动控制解决方案的搜索范围缩小到步进电机。现在是决定 2 相还是 5 相的时候了?ORIENTAL MOTOR 制造两相 (1.8°/0.9°) 和五相 (0.72°/0.36°) 步进电机和驱动器。我们在这两种技术方面的经验为我们提供了独特的视角。ORIENTAL MOTOR 进行了逐项快速比较,以澄清 2 相与 5 相争论的困惑和迷思。该指南涵盖了两种技术在步进电机性能关键领域的基本差异:分辨率、振动、扭矩、精度和同步性。ORIENTAL MOTOR 经验丰富的技术支持人员也可以为这两种技术提供更深入的解释。
2相,5相,有什么区别?
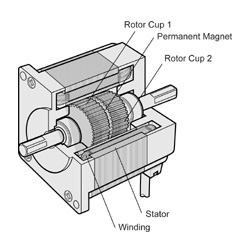
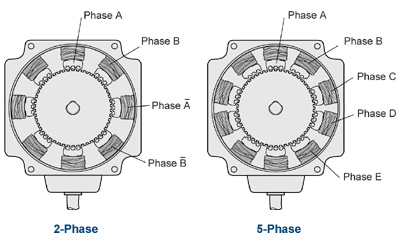
2 相和 5 相步进电机之间有两个主要区别。第一个是机械的。步进电机基本上由两部分组成,定子和转子。转子又由三个部件组成;转子杯 1、转子杯 2 和永磁体。在二相电机中,定子由 8 个带小齿的磁极组成,而五相电机定子由 10 个磁极组成。定子中的每个磁极均设有绕组。
2 相和 5 相的第二个区别是相数。两相电机有两个相,“A”相和“B”相,而五相电机有五个相。本质上,相数是指按顺序通电以吸引转子的不同磁极组合。
2相和5相头对头
这些差异如何影响性能?步进电机的性能涉及许多因素。驱动步进电机的方法有很多种,而驱动器会极大地影响电机的性能。Wave Drive、Full Step、Half Step 和 Microstep 是最常见的驱动方法,每种方法都提供截然不同的性能。在不考虑各种驱动方法的情况下,这里是 2 相和 5 相步进电机的关键性能领域。
解决
在结构上,5 相步进电机与 2 相电机没有太大区别。两个电机的转子都有 50 个齿。不同之处在于,因为 5 相电机有 10 个极,每相 2 个,转子只需移动 1/10 齿距即可与下一相对齐。在 2 相电机中,转子必须移动 1/4 个齿距以与下一相对齐(8 极,每相 4 个)。
这导致 2 相每转 200 步,每步 1.8°,而 5 相每转 500 步,每步 0.72°。5 相分辨率的提高是其设计所固有的。当与微步进驱动器结合使用时,5 相电机的步距可小至 0.00288°,但位置精度和重复精度仍受限于电机的机械精度。2 相和 5 相电机的机械精度均为 ± 3 弧分 (0.05°)。
振动
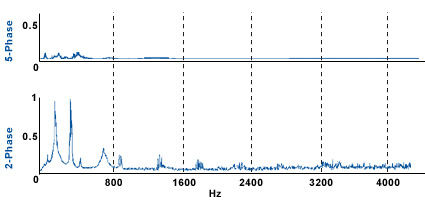
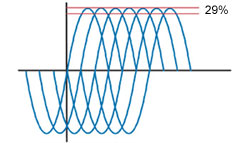
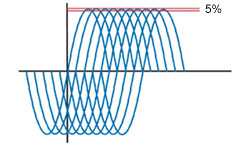
由于 5 相步进电机的步距角更小,0.72° 与 2 相电机的 1.8° 相比,5 相电机的振动远小于 2 相电机。右图显示了 5 相电机产生的振动与 2 相步进电机产生的振动。如您所见,两相电机会产生更大的振动。
*右侧的图表表示每转 5K 步的微步进。这些图表是通过将发电机连接到双轴电机创建的。当电机振动时,生成的电压被绘制成图表。电机振动越大,产生的电压就越大。
力矩
虽然 2 相步进电机和 5 相步进电机的输出扭矩之间几乎没有差异,但 5 相电机确实具有更多“可用”扭矩。这主要是由于两个电机产生的扭矩波动量。
半步或微步 5 相步进电机实际上增加了高达 10% 的扭矩,因为更多的相被通电。当半步进和微步进时,两相电机会损失高达 40% 的扭矩,但是,许多两相驱动器通过过驱动相反的扭矩矢量来补偿。
当定子通电时,它会产生一个吸引转子磁通量的电磁铁。磁通量可以分解为两个矢量,一个是法向矢量,一个是切向矢量。仅当存在切向分量时才会产生扭矩。下图描述了切向通量的存在。
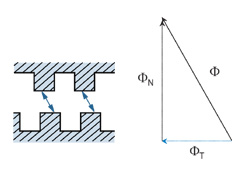
在 图 1中,转子齿与定子齿直接对齐,磁通只有法向分量,因此不产生扭矩。当转子齿从图 2、3 和 4中的定子齿移位时, 电机会产生扭矩。我们将此扭矩称为负扭矩,因为扭矩试图将牙齿拉回到稳定位置。在 图 5中,磁通在定子齿之间均匀分配,没有产生扭矩。通过 图 6、7 和 8, 当移位的转子齿移动以与下一个定子齿对齐时,会产生正扭矩。最后,转子齿与下一个定子齿直接对齐(图 1)。
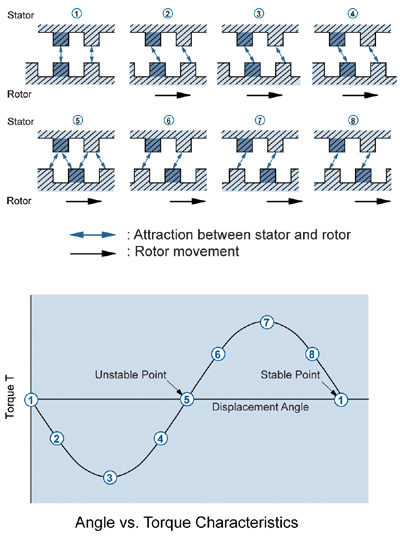
电机的每一相都为电机的总输出扭矩贡献正弦形扭矩位移曲线(如下图所示)。峰值和谷值之间的差异称为扭矩波动。转矩脉动会引起振动,因此差异越大,振动越大。
随着更多相位对电机总扭矩的贡献,5 相电机的扭矩纹波比 2 相电机大大降低。2 相电机的峰值和谷值之间的差异可高达 29%,而 5 相电机仅为 5% 左右。由于转矩脉动直接导致振动,因此 5 相电机比 2 相电机运行更平稳。
两相扭矩位移
五相力矩排量
准确性/可重复性
精度有两个组成部分,电气和机械。电气错误是由相位不平衡引起的。例如,电机的绕组电阻规格为±10%,可能电机额定功率为10W,但一相可能为9.2W,另一相可能为10.6W。相之间的这种差异会导致转子比另一相更朝向一相对齐。
机械误差有几个组成部分,主要的一个是齿形。虽然电机上的齿应该是方形的,但冲压工艺和模具的使用年限可能会导致某些齿或齿的一部分变圆。当齿变圆时,磁通量不是直接流动,而是可以流动到别处。因此,这些因素会影响电机的精度。
使用全步驱动器,两相电机每 4 步重复一次状态,而在 5 相电机中,状态每 10 步重复一次。由相位不平衡引起的任何电气错误在 2 相中每 4 步和 5 相中每 10 步被否定,只留下机械错误。
一旦电机完成完整的 360° 旋转,同一个齿现在在原始起点处对齐,消除了机械误差。由于 2 相电机每转 200 步,每 200 步几乎完美,而 5 相电机每转 500 步,每 500 步几乎完美。
同步性
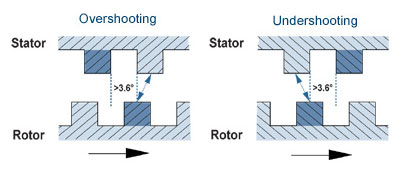
由于 5 相步进电机每步仅移动 0.72°,因此 5 相电机几乎不可能因过冲/下冲而错过一步。当转子上的齿与定子上的正确齿不对齐时,电机将失去同步或错过一步。什么会导致牙齿排列不齐?首先,为了使转子齿不能正确对齐,另一个齿必须对齐到它应该对齐的位置。为了实现这一点,转子必须有超过 3.6° 的上冲(超过正确的定子齿)或下冲(没有移动足够远以与正确的定子齿对齐)。为什么是 3.6°?好吧,因为转子齿被磁力吸引,正确的齿需要超过定子齿之间的一半才能对齐(转子齿之间的 7.2° 除以 2 得到 3.6°)。因此,当转子超出正确的定子齿超过 3.6° 时,下一个齿将在其位置对齐,从而导致您跳过一个步骤。相反,如果转子未能移动超过 3.6°,则当前转子齿将与定子齿保持对齐并且转子不会旋转,这意味着您错过了一步。
驱动方式
2 相和 5 相步进电机都有多种驱动方法。以下是整步和微步驱动器概念的快速概述。
两相全步系统(1.8°/步)
2-Phase Full Step 系统同时为 A 相和 B 相通电,并在正负之间切换以产生旋转。

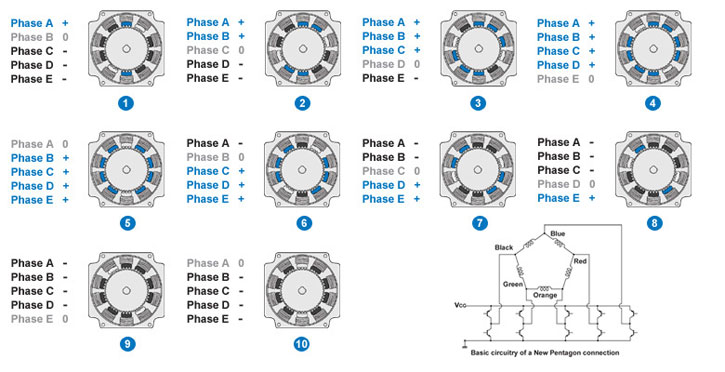
5 相全步系统(五边形 4 相励磁)(0.72°/步)
4相励磁系统是5相电机独有的,运行更稳定。
微步进
微步驱动器通过将电流减小到一个相位,同时将电流递增到下一相位来划分电机的基本步距角。这导致电机采取更小的步骤。使用微步驱动器,电机的基本步可以分为 1/1 到 1/250 范围内的更小步。
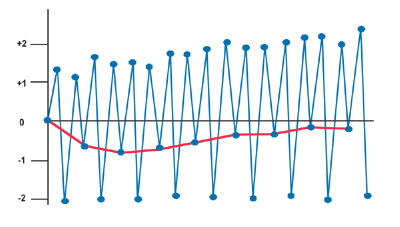
右边的插图代表了微步进的基本概念。
图 1 - A 相电流为 100%,因此转子直接对齐。
图 2 - A 相的电流减少到 75%,而 B 相现在有 25% 的电流。
图 3 - A 相和 B 相的电流均为 50%,因此转子直接排列在两者的中间。
图 4 - A 相现在为 25%,B 相为 75%,因此转子移近 B 相。
图 5 - A 相关闭,B 相处于 100%,因此转子最终直接与 B 相对齐。

通过在此示例中对电机进行微步进,我们将 5 相步进电机每转基本 500 步除以 5,将其增加到每转 2,500 步。电机的分辨率现在为 0.144°。
与其他驱动器相比,微步进不仅提供了更高的分辨率,还确保了更平稳的运行、更低的振动和更低的噪音。
结论
根据您的特定应用,两相电机可能就足够了。然而,与 2 相步进电机相比,5 相步进电机提供更高的分辨率、更低的振动、更高的加速和减速速率(由于步距角更小),并且不太可能因过冲/下冲而失去同步。对于要求高精度、低噪音和低振动的应用,5 相是更好的技术。
想了解更多?
ORIENTAL MOTOR 的技术支持团队和应用工程师将与您一起确定适合您应用的最佳解决方案。2 相、5 相、整步、微步?ORIENTAL MOTOR 经验丰富的团队成员对技术了如指掌。我们将根据您的需求找到合适的解决方案并解释备选方案。致电 1-800-GO-VEXTA (468-3982) 与 ORIENTAL MOTOR 技术支持团队成员交谈。
审核编辑:汤梓红
-
两相步进电机和五相步进电机有什么区别?2023-12-22 4167
-
步进电机所谓的“相”是什么意思?2023-06-01 6671
-
步进电机相数如何选择2023-04-28 3807
-
五线四相步进电机驱动测试程序(2个步进电机)2023-03-22 1017
-
两相步进电机和配套的两相步进电机驱动器比较2023-03-13 1411
-
两相双极步进电机的驱动 其22023-02-24 5079
-
2相和5相步进电机有何区别,如何选择?2021-10-29 4345
-
步进电机的相数是什么意思2021-08-31 1801
-
二相步进电机与三相步进电机的区别2021-07-20 12225
-
二相步进电机和三相步进电机有什么区别?相关资料推荐2021-07-08 3440
-
四相步进电机的原理说明2021-02-12 18718
-
两相步进电机和五相步进电机有什么区别2018-04-25 50880
-
步进电机相数和步进电机的基本步距角2015-12-28 12508
-
2相4线 和 2相6线步进电机2014-08-30 13829
全部0条评论

快来发表一下你的评论吧 !
