

步进电机术语表
工业控制
描述
步进电机术语表
角度精度
实际旋转角度与理论旋转角度之差。虽然根据标准的设定有多种表达方式,但一般来说,步进电机的角度精度是用停止位置精度来表示的。
角传动误差
角传动误差是根据输入脉冲数计算出的输出轴的理论旋转角度与实际旋转角度之间的差值。通常在提供减少机制时观察到。角传递误差用于表示减速机构的精度。Oriental Motor 的行星 (PN) 齿轮旨在将角传动误差降至最大仅为六弧分,可有效用于高精度定位和分度应用。
自动电流削减
此功能用于在未输入脉冲信号时将电机电流自动降低约 50%,以最大限度地减少电机和驱动器的发热。(在 CMK 系列和 UMK 系列步进电机中约为 40%)。此功能会在电机停止时自动降低电机电流,并在脉冲信号停止后约 0.1 秒内执行此操作。

反弹
齿隙是一个术语,用于描述齿轮或联轴器中的间隙。由于无法控制背隙角度的范围,因此尽量减小背隙有助于提高定位精度。Oriental Motor 提供无背隙谐波和 PN 齿轮类型以及低背隙的 TH 齿轮类型。
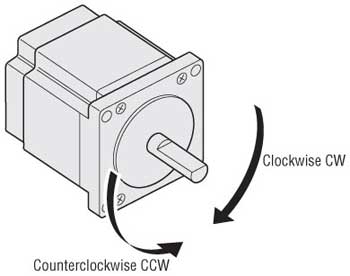
顺时针、逆时针
电机的旋转方向表示为 CW(顺时针)或 CCW(逆时针)。这些方向是从输出轴看的。
励磁原位
步进电机通过根据预设组合和顺序向电机线圈发送电流来旋转。励磁顺序是电流被发送到电机线圈的顺序。它随电动机和励磁系统的类型而变化。
励磁顺序
激励序列处于其初始状态的条件。在 5 相步进电机中,序列以 7.2˚ 的间隔返回到初始状态。
引力操作
重力操作是指提升负载的向下运动。由于电机靠重力运行,因此该应用中使用的伺服电机会发电。为了防止由此产生的电力损坏驱动器,需要再生电路。步进电机(包括我们的 AlphaStep)的运行与脉冲同步,即使在重力运行期间也能实现速度控制。
惯性负载
这是物理对象维持其当前动能水平所拥有的力的程度。每个物理对象都有一个固有的惯性负载。需要更大的扭矩来加速和减速具有更大惯性负载的物体。这种扭矩的大小与惯性负载的大小以及从运行速度和加速时间获得的加速度成正比。
微步
微步进是一种用于通过控制流向电机线圈的电流并将步进角分成更小的步进来实现更高分辨率的技术。极小的步距有助于消除步进驱动引起的振动,从而实现低振动和低噪音运行。
失误
步进电机通过脉冲信号同步。当速度快速变化或发生过载时,它们可能会失去同步。失步是与输入脉冲失去同步的术语。正确选择和正常运行的电机不会突然失步。本质上,失步是伺服电机发生过载警报的情况。
悬臂负载
电机轴在垂直方向上的负载。该值因型号而异。
光电耦合器
光电耦合器是将电信号作为光进行中继的电子元件。它们在输入和输出侧是电子绝缘的,因此噪声对它们的影响很小。输入(输出)“ON”表示电流送入驱动器内部的光电耦合器(三极管)。输入(输出)“OFF”表示电流没有送入驱动器内部的光电耦合器(三极管)。

脉冲输入方式
CW/CCW 旋转方向由脉冲命令控制时使用的脉冲模式。脉冲输入配置可以是 1 脉冲 (1P) 输入模式或 2 脉冲 (2P) 输入模式。1 脉冲输入模式使用脉冲信号和旋转方向信号,而 2 脉冲输入模式使用 CW 脉冲输入 CW 方向和 CCW 脉冲输入 CCW 方向。
谐振
这是指在特定速度下振动变大的现象。共振是电机或其他机构的特征振动频率和运行振动的结果。对于两相步进电机,在 100 Hz 和 200 Hz 之间存在共振区域;5 相步进电机的共振水平较低。
推力载荷
推力载荷是电机输出轴方向的载荷。该值因型号而异。
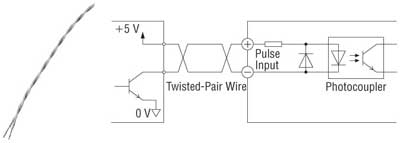
双绞线
双绞线将两根电线缠绕在一起,如下图所示。它们用于降低信号线中的噪声。由于电线彼此朝向相反的方向并承载相同的电流,因此抵消了来自周围环境的噪声并降低了噪声影响。
审核编辑:汤梓红
-
RS-232术语表和选择指南2024-08-26 598
-
【收藏】人工智能术语表2021-02-02 1211
-
电子元器件基础知识、电子专业英语术语、模拟术语表2016-11-25 4628
-
日图带你学示波器-术语表完结篇2016-03-30 2442
-
日图带你学示波器-术语表2016-03-16 2463
-
FPGA 英文术语表 解释2013-06-14 3423
-
模数规格和性能特性术语表2010-06-01 838
-
步进电机原理及术语2010-01-09 5189
-
何为燃料电池和燃料电池术语表2009-11-04 1689
-
家用网络设备术语表2009-08-05 853
-
电磁兼容(EMC)专业术语表2009-03-23 1086
-
GTK术语表2008-10-21 4218
-
蓝牙术语表2008-09-17 1923
-
装配、SMT相关术语表2008-08-03 1677
全部0条评论

快来发表一下你的评论吧 !
