

克服旋转振动的CVD系列2相双极步进电机驱动器
电子说
描述
克服旋转振动的CVD 系列 2 相双极步进电机驱动器
使用经济实惠的先进技术轻松将振动降至最低
理想情况下,步进电机应在所有速度范围内平稳无振动地运行。实际上,它们在低速、中速或高速运行时会产生一些振动,从而产生不需要的噪音。这种振动称为“旋转振动”,开发旋转振动抑制系统是一项重大挑战。为了克服这个问题,通常将步进电机细分为许多更小的步进。然而,以今天的技术,单靠微步进是不够的。并非所有步进电机驱动器或芯片都以相同的方式管理旋转振动。本技术论文将解释 CVD 系列 2 相双极步进电机驱动器技术的优势。
电流控制的改进
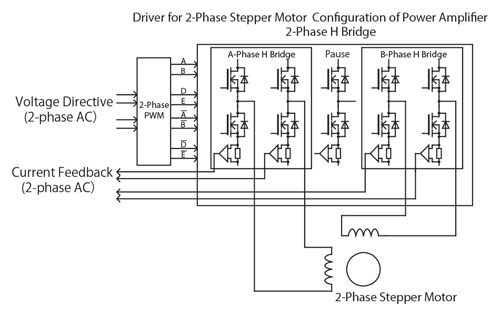
· 采用最新的微处理器技术和先进的算法,采用单相电流检测方法
控制电机意味着控制流过电机绕组的电流。如果可以控制流过电机绕组的电流,则可以更平稳地运行电机。为此,检测电机绕组电流的方式变得很重要。
从历史上看,5 相步进电机技术的优势之一是电路使用全相电流检测方法,可同时检测连接到电机的所有 5 根电机电缆(电线)的电流。由于该方法只需要一个检测电路,电路简单。但是,这种方法无法检测到没有经过检测电路的回流电流。因此,电流控制变得不稳定,导致额外的驱动器设计步骤来控制振动。
Oriental Motor 的 CVD 驱动器使用单相电流检测方法来改进电流控制,该方法使用最新的微处理器分别检测 5 种不同的电流,或者在 2 相 CVD 驱动器的情况下,4 种不同的电流控制(参见图 1)技术与先进的算法编程。
带电流校正的最大扭矩
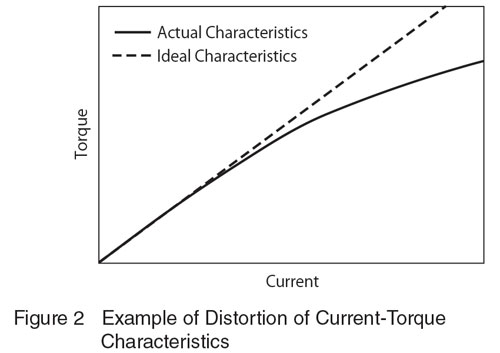
· 利用电机的电磁电流特性,最大化电机扭矩输出
在电机绕组电流与比例扭矩输出匹配的范围内,电机输出扭矩与电流成正比。随着电流变大,即超过额定电流加在绕组上,由于磁通的电枢反应引起的磁饱和现象,电流与转矩的关系逐渐偏离其正比关系(见图2). 为了提高电机的输出转矩,需要有效利用比例关系发生偏离的范围。
Advanced Microstepping
· Smooth Drive,使用最新的微处理器允许在所有速度范围内进行微步进
由于步进电机在每个步进角运行和停止,因此它们能够进行高精度的位置控制。但是,每旋转一个基本步距角,转子的速度就会发生变化,这可能会成为振动或噪音的原因。已实施微步来抑制这种类型的振动。微步进是一种通过控制流过电机绕组的电流来划分电机基本步距角的技术。通过减小步距角,向前移动一步时的速度变化最小,从而可以实现低振动。
除了微步之外,CVD 还提供最先进的微步功能 Smooth Drive 技术,无需增加发送给驱动器的脉冲。带有 Smooth Drive ON 功能的 CVD 自动微步,电机每整步 (1.8°) 最多可微步 2048 步 (0.0008°)。大多数微步驱动器提供高达每转 51,200 微步 (0.007°) 的分辨率。启用 Smooth Drive 后,这会显着提高所有速度范围内的整体性能,而不仅仅是较低的速度范围(图 3),从而大大减少可能导致步进错误的振动。这允许更宽的电机速度设计窗口到性能结果。
最小化扭矩纹波
· 校正提供给电机的正弦电流
改变励磁相位时输出转矩的波动称为转矩脉动。理论上,通过将各相产生的扭矩改变为正弦波,不会产生扭矩波动。如果电机电流与产生的转矩呈线性关系,则通过将各相电流变为正弦波就不会产生转矩脉动。但是,电机电流和产生的扭矩之间的关系不是线性形式。因此,当将各相电流改变为正弦波时,电流值较大的地方会发生转矩畸变,从而引起振动。简而言之,同时处理高输出扭矩和低振动需要额外的控制机制。
为了解决这个问题,CVD 驱动器适当地校正提供给电机的正弦电流的相位。这产生了校正电流-扭矩特性失真的效果,从而能够同时处理低振动和高输出扭矩。此外,这还提高了停止位置的准确性。
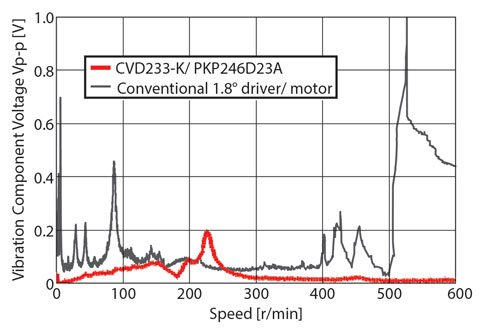
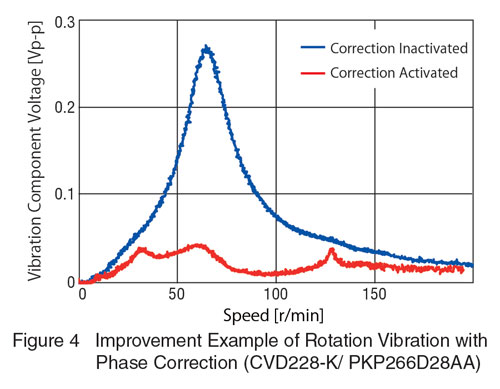
图 4 显示了通过相位校正改善了多少旋转振动特性。激活相位校正可显着改善振动的峰值。
相位修正的最佳值根据电动机的磁特性而变化。为此,为每个与电机组合的驱动器设置最佳校正量。
考虑到电机的磁特性,进行电流控制,同时发挥高性能——这是同时开发电机和驱动器的Oriental Motor的优势之一。
审核编辑:汤梓红
-
控制的双极步进电机驱动器介绍2023-12-20 2616
-
TB5128FTG两相双极步进电机驱动器规格书2023-05-17 773
-
CVD 步进电机驱动器说明2023-03-13 4998
-
步进电机的双极连接和单极连接驱动方法2023-03-10 2028
-
两相双极步进电机的驱动 其22023-02-24 4923
-
TB8825FNG两相双极步进电机驱动器IC手册2022-11-21 791
-
TB6600HG双极正弦微步步进马达驱动器中文手册2022-11-15 1236
-
TB67S109AFNG时钟控制双极步进电机驱动器数据手册2022-08-04 1425
-
双极步进电机驱动器电路图2022-06-13 6787
-
两相步进电机的双极连接和单极连接2021-06-12 3615
-
用于PWM控制的双极步进电机驱动器2020-05-19 3489
-
MD5系列步进电机驱动器的连接图2017-09-29 1362
全部0条评论

快来发表一下你的评论吧 !
