

如何使用步进电机解决尺寸和重量增加的负载问题
工业控制
描述
如何使用步进电机解决尺寸和重量增加的负载问题
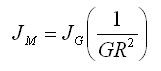
增加尺寸和重量会增加负载的惯性和移动负载所需的扭矩。齿轮传动是克服大惯性负载的一个很好的选择,因为它会通过齿轮比的平方来减少电机上的反射惯性。
添加齿轮比也会增加产生的扭矩量。通常,产生的扭矩等于电机扭矩乘以传动比和齿轮的效率。但是,有时输出扭矩会因其他机械原因而受到限制,例如轮齿强度、齿轮箱强度或齿轮架强度。
Tg = Tm x GR x 效率
有多种齿轮可供选择。使用哪个齿轮的决定将归结为扭矩、速度和齿隙要求。下面列出了每种齿轮类型的摘要。
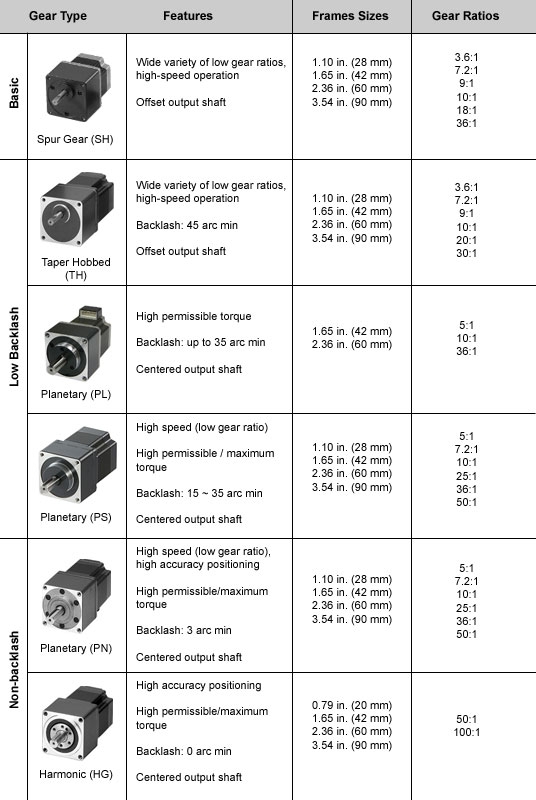
为了尽可能快地移动,必须考虑加速扭矩。可用于加速的扭矩越大,移动速度就越快。比较齿轮时,行星齿轮比锥形滚齿齿轮或正齿轮具有更大的可用扭矩。这是因为行星齿轮可以分散所有行星齿轮之间的力,而不是每个齿轮承受全部力。因此,行星齿轮将能够比锥形滚齿齿轮或正齿轮更快地移动。
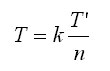
T:施加到每个行星齿轮的扭矩 (Nm)
T':总扭矩传递 (Nm)
n:行星齿轮的数量
k:离散系数
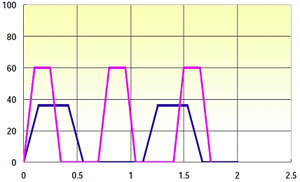
下面是一个示例,说明更大的可用扭矩如何实现更快的加速。圆锥滚齿齿轮和PS行星齿轮在示例中与60mm电机一起使用。
最大扭矩
60 毫米 TH:35 磅英寸
60 毫米 PS:177 磅英寸
更多可用扭矩意味着我们可以更猛烈地加速电机,从而减少移动时间。
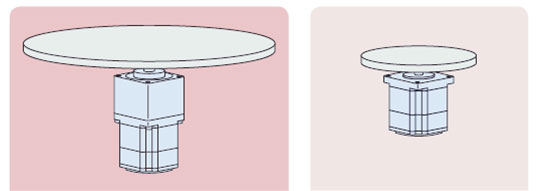
如何解决尺寸和重量增加的负载
磁盘
20英寸直径
20磅
运动曲线
1.5 秒内 360°
一个运动方向(CW)
安全要素
最低 1.5

系统要求
单相 115 VAC
需要电机和驱动器
为了将负载惯量与转子惯量之比保持在 10:1 以下,必须使用至少 40.8 的传动比。这从可能的解决方案中消除了锥形滚齿和正齿轮。由于运动仅顺时针方向进行,因此不存在反冲问题,因此我们将看一下 50:1 PS 行星齿轮。

50:1 行星齿轮的最大速度为 60 RPM,因此这仍然是一种选择。


上面计算的负载扭矩基于 0.05 的摩擦系数、工作台中心到支撑机构的 1 英寸距离以及 90% 的整体系统效率。

所需扭矩为 1092 oz-in 或 68.25 lb-in。
审核编辑:汤梓红
-
步进电机过载怎么处理2025-04-21 1864
-
步进电机怎么选型?2024-12-17 1955
-
选用步进伺服电机替换步进电机,有什么优势?2023-09-08 1648
-
步进电机如何选型2023-03-21 1032
-
步进电机驱动原理及选型2023-03-20 1079
-
STM32一体化步进电机驱动器控制步进电机2023-03-16 984
-
伺服电机和步进电机的精度和优缺点2023-03-09 11732
-
步进电机的惯量选择_步进电机惯性大怎么解决2023-03-08 6983
-
步进电机的选用及电机型号、参数、尺寸标准2021-11-30 3689
-
二相步进电机与三相步进电机的区别2021-07-20 12100
-
步进电机是如何增加动态转矩的?有什么方法吗2021-07-07 1617
-
如何正确选择步进电机和伺服电机2020-08-08 2631
-
影响两相步进电机负载力变化的因素2020-03-10 2287
全部0条评论

快来发表一下你的评论吧 !
