

对齐C型气动焊钳上的圆形电极臂
描述
在对齐固定式电极臂后必须注意要重新计算 TCP 点。
在对齐前要注意焊钳随附资料中的报告和图纸。
第 1 步:切断机器人焊钳电流,释放压力并排出气动元件的气体。
第 2 步:关闭冷却水循环。
第 3 步:将带焊钳的机器人移至一个安全的维护位置。
或者分离机器人焊钳与机器人,并将机器人焊钳定位至适合进行维护工作的基架上。
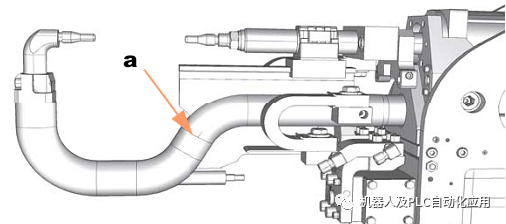
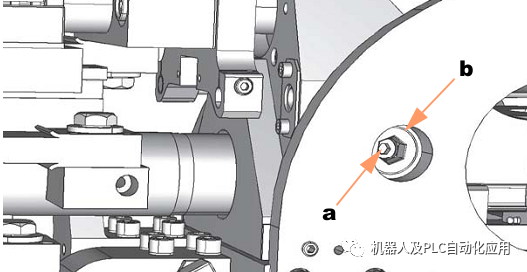
第 4 步:在带圆形电极臂的 C 型焊钳上对齐固定式电极臂 (a)。
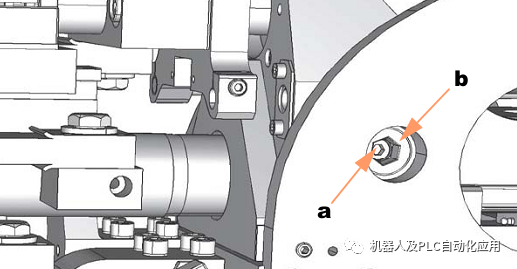
第 5 步:取下两侧的 M8 内固定螺栓 (a)。然后松开固定式电极臂两侧的夹紧螺栓 (b)。

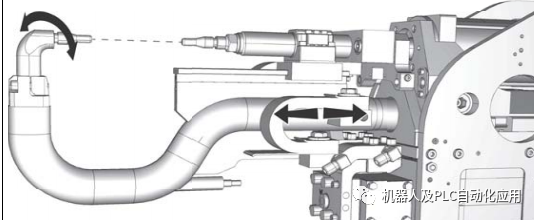
第 6 步:现在您可以小心地扭转电极臂并纵向移动,进行对齐。
第 7 步:在夹紧电极臂前要检查所有绝缘件,确保没有损坏。
必须对齐绝缘套管槽,确保它在钳体的安装位置向下,以避免污物进入。
第 8 步:计算 TCP 点。为此要注意焊钳随附资料中的报告和图纸。
第 9 步:拧紧固定式电极臂两侧的夹紧螺栓 (b)。用固定螺栓 (a) 固定夹紧螺栓。
完成对齐
审核编辑 :李倩
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
气动驱动柔性臂自适应模糊振动控制_王斌2017-02-07 697
-
气动点焊机的使用方法_气动点焊机操作注意事项2020-02-07 7404
-
C语言中Linux字节对齐的问题2021-08-16 3450
-
C语言 | 内存对齐01 - 什么是内存对齐2022-01-13 884
-
电伺服焊钳的摆臂铣刀的SG_Background控制2022-07-26 1777
-
FESTO焊钳故障报警分析2022-08-15 3047
-
对齐X型气动焊钳上的扁平电极臂及更换极臂.2023-03-02 2092
-
更换X型焊钳上的扁平电极臂2023-03-14 1670
-
更换与旧电极臂对齐的电极臂2023-03-31 2576
-
更换C型焊钳上的变压器2023-05-31 1845
-
机器人对齐电极臂前的执行步骤2023-09-01 1139
全部0条评论

快来发表一下你的评论吧 !
