

步进电机的特点及闭环控制方式
工业控制
描述
步进电机是我们生活中常见的电机之一。顾名思义,步进电机是根据一系列步距角进行旋转,就像人们一步步上下楼梯一样。步进电机将完整的360度旋转等分为若干步长,按顺序执行步长从而实现特定旋转,同时通过控制脉冲个数来控制角位移量,达到准确定位的目的。有特别需要的还可以通过控制脉冲频率,来控制电机转动的速度和加速度,从而达到调速的目的。
步进电机结构简单、控制方便、安全性高,在低速情况下不需要减速机就可以输出很大的力矩,相比直流无刷和伺服电机,在不需要复杂的控制算法也不需要编码器反馈情况下,可以实现位置控制。
步进电机的特点
步进电机工作时的位置和速度信号不反馈给控制系统,如果电机工作时的位置和速度信号反馈给控制系统,那么它就属于伺服电机。相对于伺服电机,步进电机的控制相对简单,但不适用于精度要求较高的场合。
步进电机的优点和缺点都非常的突出,优点集中于控制简单、精度高,缺点是噪声、震动和效率,它没有累积误差,结构简单,使用维修方便,制造成本低。步进电机带动负载惯量的能力大,适用于中小型机床和速度精度要求不高的地方,缺点是效率较低、发热大,有时会“失步”。
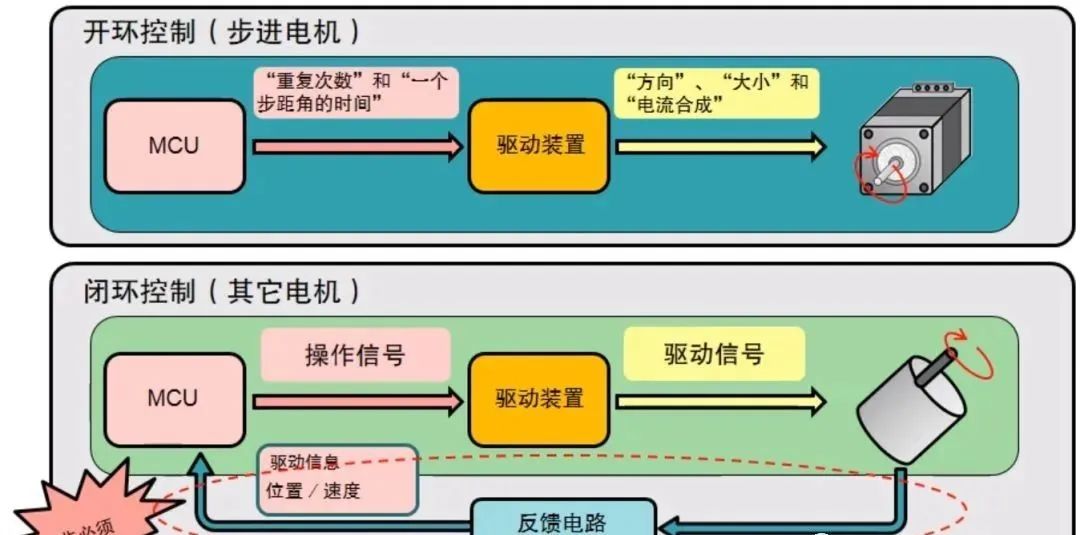
步进电机的闭环控制方式
步进电机的闭环控制方式一般分为开环控制与闭环控制两种控制方式。
1、使激磁磁通与电流的相位关系保持一致,使其产生能带动负载转矩的电磁转矩,这种控制电机电流的方式与无刷直流电机控制方式相同,称为无刷驱动方式或电流闭环控制方法。
2、电机电流保持一定,控制激磁磁通与电流相位角的方式,称为功率角闭环控制方法。功率角为转子磁极与定子激磁相(或认为是同步电机的定子旋转磁场轴线也可以)相互吸引所成的相位角。此功率角在低速时或轻载时较小,高速时或高负载时较大。引用前文开环控制的原理部分中的下图所示,“杠A”相吸引转子磁极,其次“杠B”相激磁时的角度有π/2,转子磁极位于“杠A”相前缘(图中转子的S极位于A相的左侧)时,使磁极“杠B”相开始激磁。
综合整理自电控知识搬运工、东芝半导体、雨飞工作室
-
步进电机开环控制与闭环控制有什么区别?2023-10-24 3550
-
闭环控制步进电机对比传统开环控制的优点2022-11-12 3096
-
剖析传统步进电机转型闭环控制2021-09-17 6163
-
传统步进电机转型闭环控制2021-09-10 9766
-
总线控制与脉冲控制的区别以及开环、半闭环、闭环控制方式的区别在哪2021-07-05 4336
-
步进电机全闭环控制系统2019-06-24 2606
-
步进电机闭环控制的作用2018-09-05 3234
-
拓达伺服步进电机位置闭环控制2018-08-25 3642
-
闭环步进电机是什么_步进电机开环与闭环有何区别2018-04-25 112315
-
关于步进电机的闭环控制2016-03-28 4352
-
求基于步进电机的阀门闭环控制的仿真2012-10-22 3066
-
步进电机全闭环控制技巧2012-01-06 15692
-
基于PLC间通信的步进电机远程闭环控制2009-08-15 793
全部0条评论

快来发表一下你的评论吧 !
