

三相全波无刷电机的无传感器120度驱动
工业控制
描述
下图为普通的无传感器三相全波无刷电机120度驱动电路示例。
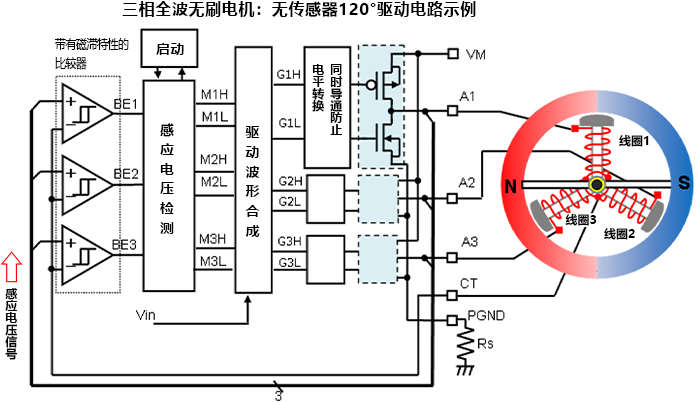
在无传感器三相全波无刷电机120度驱动中,有一种使用线圈的感应电压代替霍尔元件来检测电机位置的方法。该方法利用了三个线圈中点处的信号CT。通过捕获该CT信号和A1、A2、A3信号并输入驱动电路,并由比较器进行比较,来生成各输出。其过程与有传感器驱动基本相同,不同之处在于该方式使用感应电压。
感应电压是穿过永磁体旋转时未通电的线圈的磁通量发生变化时产生的电压,在通电中的线圈中是无法检测到的。在无传感器三相全波无刷电机120度驱动中,3相中有2相通电,1相未通电。在该未通电相的引脚上出现感应电压,通过使用中点的CT电压检测感应电压的过零交来检测出电机的位置。
对于三相电机来说,电机旋转一圈(360度)的过程中,一个相有2次未通电的关断期间(120度通电 + 60度关断两次),三个相有6次关断期间。也就是说,可以每60度检测一次位置,并基于每相的过零点和过零点之间的60度信号生成输出信号。
下面使用以下的无传感器三相全波无刷电机120度驱动波形示例进行具体说明。
线圈1、2、3的电流波形显示,120度通电驱动,即线圈电流在120度时流入,在60度时关断,然后在120度时流出并在60度关断,其输出电压波形为A1、A2和A3。
用于检测电机位置的感应电压可以在各相60度关断期间检测到。
以线圈1为例,在红色所示的“关断期间”,在输出A1中出现感应电压,并被检测出来。此时,线圈2和线圈3处于电流流动的状态。当从线圈电流流入状态进入关断状态时,在切换时产生尖峰噪声(瞬态电压)后,感应电压会降低。当从流出状态转变为关断状态时,尖峰噪声出现后,感应电压会上升。
将输出产生的这种感应电压信号与线圈中点信号CT(图中未显示)相结合的信号为比较器输出BE,在感应电压的过零点,下降时从H转变为L,上升时从L转变为H。
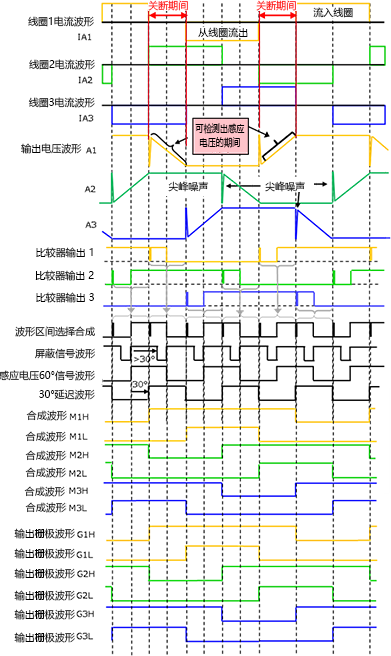
根据比较器输出BE1~3相加形成的“波形区间选择合成”,BE1~3被合成为在60度转变的信号。由于该信号中包含不是感应电压的本来的尖峰噪声,因此根据合成使用屏蔽信号(H部分)屏蔽了尖峰噪声后的感应电压60度信号波形,并使相位延迟30度的波形,生成各合成波形和输出栅极波形。
下图是线圈电流关断期间的输出A1~3的波形放大图。该例显示了线圈3从电流流出状态到关断后的60度期间的波形情况。电路图显示了当时的电路状态。
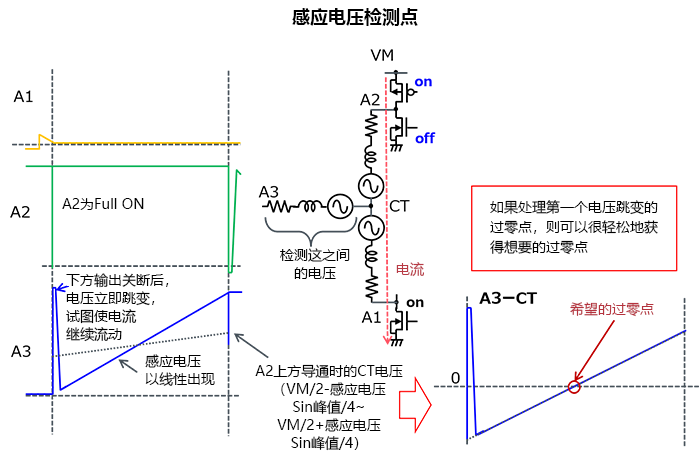
对于A2来说,由于高边MOSFET导通、低边MOSFET关断,所以电流流出,电压处于高电平状态。对于A1来说,由于低边导通,所以流过来自A2的电流,电压变为低电平状态。而对于A3来说,由于是从电流流入状态变为关断状态,如波形所示,在电压瞬间跳变后,感应电压以线性逐渐出现。此时的A3和CT之间的电压与A3的电压波形重叠,用虚线来表示。CT的电压约为A2和A1电压的一半。
通过取A3电压与CT电压的差值,如右侧所示,可以检测到感应电压的过零点,前面给出的时序图中的BE3从L转变为H。
以上用一个简单的例子解释了无传感器120度驱动的原理。与有传感器120度驱动相比,机制大致相同,不同之处在于检测的是感应电压而不是传感器信号。
关键要点:
・在三相全波无刷电机的无传感器驱动中,有一种使用线圈的感应电压代替霍尔元件来检测电机位置的方法。
・在三相全波无刷电机的无传感器驱动中,利用了三个线圈中点处的信号CT。
・通过捕获该CT信号和A1、A2、A3信号并输入驱动电路,并由比较器进行比较,来生成各输出。
・这种三相全波无刷电机的无传感器驱动方式与有传感器驱动基本相同,不同之处在于该方式使用感应电压。
审核编辑:郭婷
-
三相全波无刷电机基本旋转原理2024-02-05 2422
-
三相全波无刷电机的无传感器专用启动方法2023-03-09 2911
-
三相全波无刷电机驱动的每种激励方式介绍2023-03-07 2205
-
三相全波无刷电机的旋转原理2023-02-24 1674
-
A5941无传感器三相电机驱动芯片有哪些主要优点2021-08-27 3387
-
三相直流无刷电机驱动器硬件原理图+详解2019-10-30 19566
-
AN44150A-EVB-0 AN44150三相无刷电机驱动器评估板2019-06-28 2288
-
三相正弦波无刷电机驱动方案分享2018-09-27 10511
-
三相无刷电机驱动,三相无刷调速电机,三相无刷落地扇电机2017-11-24 3668
-
MCP8063三相正弦无传感器无刷电机工业控制驱动方案2017-08-04 10713
全部0条评论

快来发表一下你的评论吧 !
