

三相全波无刷电机的无传感器专用启动方法
工业控制
描述
本文将介绍三相全波无刷电机的无传感器专用启动方法。基本的启动方法有两种,一种是检测同步运行时产生的感应电压并来启动,另一种是检测永磁体停止位置来启动,将分两篇进行具体介绍。
三相全波无刷电机无传感器120度驱动的启动问题
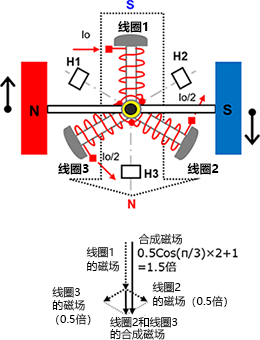
如“三相全波无刷电机的旋转原理”和“三相全波无刷电机的位置检测”中所述,三相全波无刷电机的启动在有传感器的情况下,由于停止时的永磁体(转子)的N极和S极位置是可知的,因此如右图所示,是通过使电流开始流过线圈,从而产生90度的合成磁场来启动的。 在无传感器的情况下,如“三相全波无刷电机的驱动:无传感器120度驱动”中所述,是使用因永磁体的旋转而未通电的线圈所产生的感应电压进行位置检测来驱动的,在停止时无法掌握永磁体的位置,因此需要一些步骤才能启动。其中之一是通过检测同步运行时的感应电压来启动的方法。
无传感器120度驱动的启动方法一:通过检测同步运行时的感应电压来启动
如上所述,在无传感器的情况下,无法掌握停止时永磁体的位置,因此无法知道启动时如何给三个线圈通电。其对策之一,是通过同步运行使永磁体旋转,并检测所产生的感应电压,进行120度通电驱动的方法,下面使用下图进行说明。
①:如果永磁体在①的位置,则本来应该使线圈中流过电流以在6点钟方向产生合成磁场,但由于不知道永磁体的位置,故无论永磁体的位置如何,都在预先确定的位置(图中为5点钟方向)生成合成磁场。
②:如果这种状态保持一定时间,则永磁体的S(N)极就会被合成磁场的N(S)极吸引,永磁体就会稍微沿顺时针方向移动(旋转)。
③、④:但是,由于这种移动尚不足以产生感应电压,所以接下来使之在7点钟方向产生合成磁场。这样,永磁体将同样沿顺时针方向移动。
⑤、⑥:当继续使之在9点钟方向产生合成磁场时,永磁体进一步顺时针移动并开始旋转。
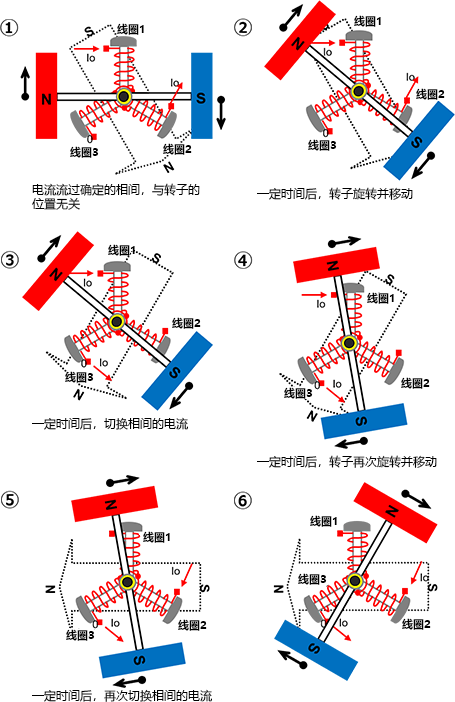
如果继续这个操作,并逐步缩短切换时间,则永磁体的转速会提高,并逐渐产生可以检测得到的感应电压,当处于感应电压可以被确认的状态时,将进入通常的无传感器120度通电驱动。 也就是说,这种方法的机制是:无论永磁体的位置如何,都在旋转方向上形成合成磁场,通过在一定时间内进行切换,使永磁体开始旋转,从而产生的感应电压,检测到该感应电压并将其应用到正常控制中。 在这种方法中,如果在开始时合成磁场切换过快,永磁体将不会跟随,因此需要从缓慢的周期开始,一点一点地逐渐加快。
检测同步运行时的感应电压的功能框图和工作波形
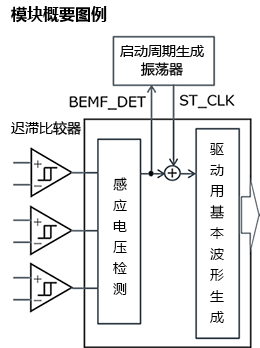
这是前面提到的工作的功能框图和工作波形。 用来生成启动周期的振荡器将ST_CLK发送到驱动用的基本波形生成模块,使之通过该信号生成预先确定了位置(与上述永磁体位置无关)的合成磁场,并按信号周期在旋转方向上切换合成磁场。 BEMF_DET是用来通知检测到感应电压的信号,当该信号进入启动周期生成振荡器时,ST_CLK停止,BEMF_DET被输入到驱动用的基本波形生成模块,开始生成基于感应电压的合成磁场,并进入正常控制状态。
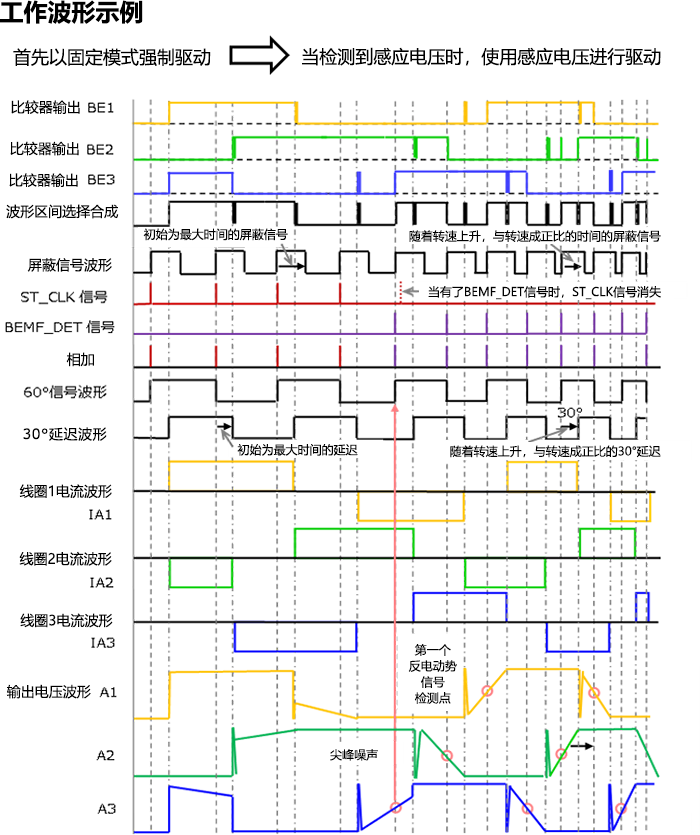
下面是显示了所述一系列工作的波形示例。图中的ST_CLK信号、BEMF_DET信号和它们相加的信号(请参考框图)以及输出电压波形A1~3,分别对应于本文中的说明。BEMF_DET信号的周期越来越短表明转速正在增加。
这种启动方法存在以下问题:
・由于生成合成磁场时不考虑永磁体的位置,因此在某些状态下,可能会施加反向转矩,在某些永磁体停止位置,启动时需要时间。
・本来,产生足够转矩的永磁体与合成磁场的位置关系是90度,但由于生产合成磁场时不考虑永磁体的位置,所以会从比如70度或60度等角度开始,所以无法获得固定的较大启动转矩。
处理这些问题需要采用本文开头提到的另一种方法,即通过检测永磁体停止位置来启动的方法。将在下一篇中详细介绍这种方法。
关键要点:
・要启动三相全波无刷电机无传感器120度驱动时,由于停止时的永磁体位置未知而需要采用以下方法: ①通过检测同步运行时产生的感应电压来启动 ②通过检测永磁体停止位置来启动 ・方法①是无论永磁体的位置如何,都在旋转方向上形成合成磁场,通过在一定时间内进行切换,使永磁体开始旋转,从而产生的感应电压,检测到该感应电压并将其应用到正常控制中。 ・这种启动方法存在以下问题: -由于生成合成磁场时不考虑永磁体的位置,因此在某些状态下,可能会施加反向转矩,在某些永磁体停止位置,启动时需要时间。 -本来,产生足够转矩的永磁体与合成磁场的位置关系是90度,但由于生产合成磁场时不考虑永磁体的位置,所以会从比如70度或60度等角度开始,所以无法获得固定的较大启动转矩。 ・作为对策,可以采取方法②。
审核编辑:郭婷
-
请问如何确定无刷电机uvw三相和hall传感器abc的对应关系?2024-04-22 2278
-
三相全波无刷电机基本旋转原理2024-02-05 2508
-
三相全波无刷电机的无传感器120度驱动2023-03-09 2428
-
三相全波无刷电机驱动的每种激励方式介绍2023-03-07 2285
-
三相全波无刷电机的旋转原理2023-02-24 1755
-
三相全波无刷电机的结构2023-02-23 2404
-
三相无刷电机的结构、工作原理及驱动方法2023-02-12 27296
-
三相正弦波无刷电机驱动方案分享2018-09-27 10570
-
三相无刷电机驱动,三相无刷调速电机,三相无刷落地扇电机2017-11-24 3688
-
MCP8063三相正弦无传感器无刷电机工业控制驱动方案2017-08-04 11015
全部0条评论

快来发表一下你的评论吧 !
