

在icestick板子上实现从FPGA到USB Host的数据传输
描述
背景信息
icestick 板载 USB 接口芯片 FT2232H 的端口 A 和端口 B 均与 FPGA ice40hx1k 相连。其中,端口 A 处于 MPSSE 模式,用于读写 SPI Flash 以更新 FPGA 的 bitfile,而 B 口默认处于 ASYNC Serial 模式,当作串口使用。
端口 B 都只有一部分引脚连到 FPGA,无法支持 245 FIFO 或者 245 FIFO SYNC 模式以实现高速数据传输。而在 ASYNC Serial 模式时,其支持最大 12Mbaud 即最高 1.14MBps 的数据传输。
笔者发现 FT2232H 还支持一种称为 Fast Opto-Isolated Serial Interface 的模式。在 FTDI 文档和软件中,这一模式也被称为 Fast Serial Interface 模式或者 OPTO Isolate 模式。因为引入了时钟引脚,这一模式可以在使用较少引脚的情况实现比 ASYNC Serial 模式更高带宽的数据传输。
读者可以通过此文了解 OPTO Isolate 模式如何使用并按照说明可以实现最高 2.57MBps 的数据传输。
准备工作
你需要具备以下条件:
一块 icestick 开发板
ice40 FPGA 开发工具,开源工具或者 iceCube2
FT Prog 程序及 D2XX 驱动
FT2232H Datasheet
同时,笔者使用以下软件实现 Windows 端测试程序:
zadig 软件
libusb 库及开发环境
准备妥当后,我们先尝试修改 FT2232H 芯片端口 B 的模式。
修改模式
首先,我们需要使用 FTDI 公司的 FT Prog 程序来修改端口 B 的模式。而 FT Prog 程序则需要驱动程序 D2XX 驱动。
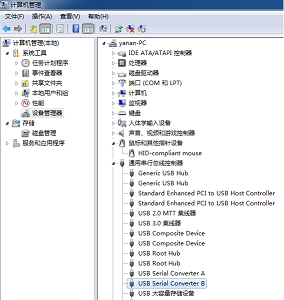
打开设备管理器,插入 icestick 后,如果 D2XX 设备驱动程序配置正常,在通用总线控制器下会出现 USB Serial Converter A 和 USB Serial Converter B 设备,如下图所示。
打开 FT Prog 程序,主菜单上点击 DEVICES 然后点击 Scan and Parse 子菜单。如果一切正常,读者应该可以看到以下界面:
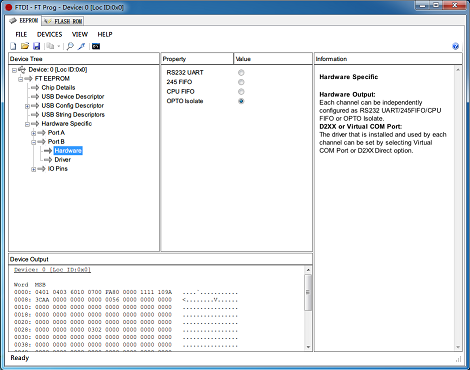
选中设备,找到 Hardware Specific 下 Port B 的 Hardware 项,选择 OPTO Isolate 项,然后在主菜单上点击 DEVICES 然后点击 Program 子菜单。
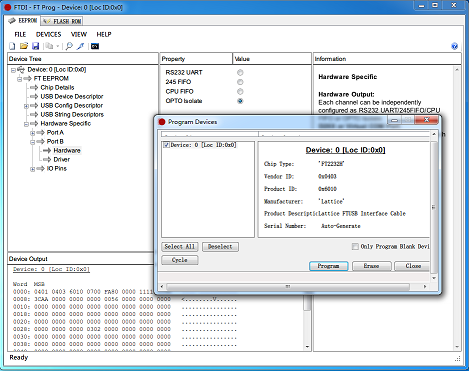
点击 Program 按钮就可以将修改后的配置选项写入 FT2232H 的 EEROM 中。
烧写完毕后可以重新拔插 icestick,打开 FT Prog 再次查看设备的 Port B 的属性是否已经修改成 OPTO Isolate。
修改成功后,我们看一下 OPTO Isolate 模式下接口的规格。
OPTO Isolate 模式
在 FT2232H Datasheet 章节 3.1.4.6 FT2232H Pins used as a Fast Serial Interface 的 Table 3.10 中我们可以找到:
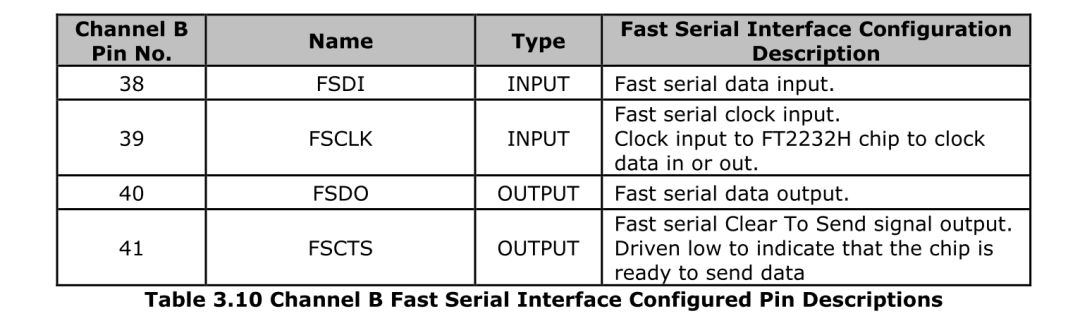
由于本文侧重于 FPGA 到 FT2232H 的数据传输,我们可以暂时忽略用于 FT2232H 到 FPGA 方向数据传输的 FSDO 引脚。
在章节 4.8.2 Incoming Fast Serial Data 中 Figure 4.15 Fast Opto-Isolated Serial Interface Input Data 我们可以看到:
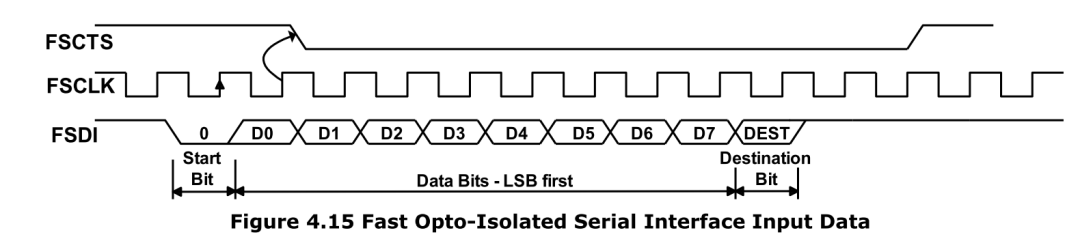
有此时序图我们可以看出:
空闲状态下 FSCTS 和 FSDI 应为高电平
FSCLK 作为数据传输的参考时钟,FT2232H 应在 FSCLK 的上升沿采数据
FSCTS 为高电平时,FPGA 可以进行数据传输
一次传输的数据由一个由 0 表示的起始位、LSB 优先的 8 位数据和一个 DEST 位组成
在 DEST 位发送后,FSCTS 仍然会保持一段时间的低电平
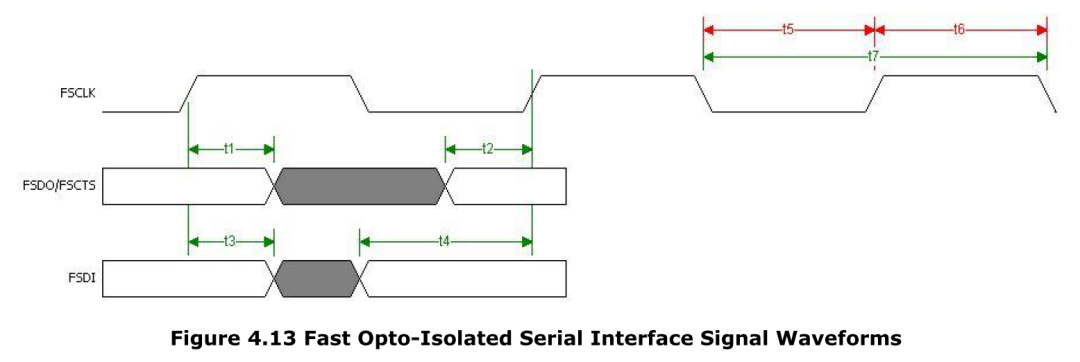
然后我们在章节 4.8 Fast Opto-Isolated Serial Interface Mode Description 的 Figure 4.13 Fast Opto-Isolated Serial Interface Signal Waveforms 看到具体时序:
以及在同一章节的 Table 4.6 Fast Opto-Isolated Serial Interface Signal Timings 看到具体时序:
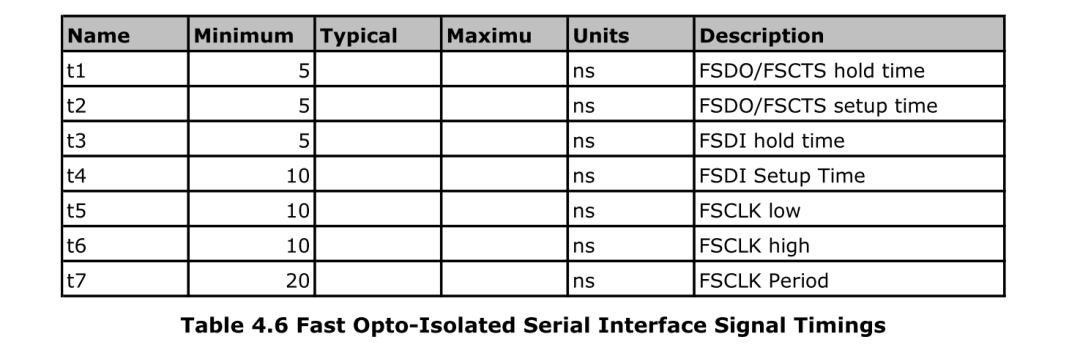
根据这些,我们可以得到:
FSCLK 的最小周期是 20ns,即最大频率是 50MHz
FSDI 的建立时间最小为 10ns,保持时间最小为 5 ns
这样我们可以根据这些参数进行 FPGA 接口设计了。
接口电路设计
在实现接口电路之前,读者需要检查具体用到的 FPGA 的性能。如果 IO 反转性能不能达到 50MHz,那么 IO 就成为瓶颈;如果 IO 性能满足要求,但是接口电路频率不能超过 100MHz 或者在支持支持双沿输出和输入的情况下超过 50MHz,接口电路就会成为瓶颈。
通过查看 ice40hx1k 的文档,我们可以大致确定 ice40hx1k 的普通 IO 反转可以做到 50MHz,而且,在此 FPGA 上实现一个运行在近 100MHz 的电路并不十分困难。
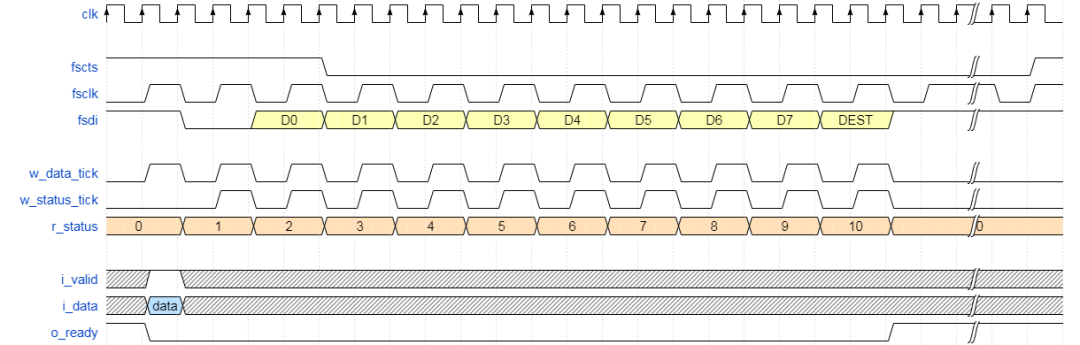
如果我们使用 100MHz 作为内部时钟,那么数据传输时序图会变成:

需要说明的是
我们使用 100MHz 使用来产生一个 50MHz 的 FSCLK 对应 IO 的反转
我们在 FSCLK 的下降沿变更数据,这样保证 FSDI 的建立时间和保持时间都是 10ns
我们会产生一个持续反转的 FSCLK,而不会在不传输数据的时候暂停 FSCLK
通过观察时序图,计数状态机来实现此电路较为简单。同时对于慢速接口电路,valid-ready 信号也是不能缺少的。加入这些信息后,数据传输时序图会变成:
有了这样的时序图,我们可以开始实现具体的电路了。
接口电路实现
首先,输入信号 FSCTS 需要经过跨时钟域处理。我们可以将 i_fscts 连接到 2 个级联的 DFF 上来进行处理,从而得到同步的信号 w_fscts。
//
// CDC signals
//
localparam DFF_W = 2;
wire w_fscts;
reg [DFF_W - 1 : 0] r_fscts_sync;
always @ (posedge i_clk)
r_fscts_sync <= {r_fscts_sync[DFF_W - 2 : 0], i_fscts};
assign w_fscts = r_fscts_sync[DFF_W - 1];
其次,Fast Opto-Isolated Serial Interface 电路本质是将并行的数据进行串行数据,我们还需要一个移位寄存器和对应的控制信号:
//
// r_data
//
// r_data keeps the data to be transmitted
//
localparam TX_DATA_W = DATA_W + 3;
reg [TX_DATA_W - 1 : 0] r_data;
reg [TX_DATA_W - 1 : 0] w_data_next;
wire w_data_tick;
wire w_data_load;
wire w_status_tick;
always @ (posedge i_clk, posedge i_arst)
if (i_arst)
r_data <= {TX_DATA_W{1'b1}};
else
r_data <= w_data_next;
always @(*) begin
w_data_next = r_data;
if (w_data_load)
w_data_next = {i_channel, i_data, 2'b01};
else
if (w_data_tick)
w_data_next = {1'b1, r_data[TX_DATA_W - 1 : 1]};
end
// w_data_load indicates if r_data could be filled safely
assign w_data_load = o_ready & i_valid;
assign w_data_tick = w_status_tick | w_status_start;
因为数据的发送需要两个必备条件,我们需要一个 bit 来确保默认情况 FSDI 的数据为高电平。这样,加上起始位和 DEST 位后,我们共需要 11 位移位寄存器。
同时,数据发送时 LSB 优先的,我们的 FSDI 自然而然的会连接到移位寄存器的最低位。
复位时,移位寄存器全部填充为 1;复位解除后,如果需要加载数据时,即 w_data_load 为有效时,那么将表示 DEST 位的 i_channel、8 位数据 i_data 、表示起始位的 0 和默认电平 1 加载到寄存器中;如果遇到 w_data_tick 有效时,那么就将移位寄存器进行右移,最高位填充 1。
然后,因为数据发送的两个条件并不是同时发生,我们需要一个寄存器来表示 r_data 是否已经填充。
// // r_data_status // // r_data_status decides the valid-ready signals and // if r_status FSM starts // reg r_data_filled; reg r_data_filled_next; wire w_data_done; wire w_status_done; always @ (posedge i_clk, posedge i_arst) if (i_arst) r_data_filled <= 1'b0; else r_data_filled <= r_data_filled_next; always @(*) begin r_data_filled_next = r_data_filled; // if the tx data has been filled if (r_data_filled) begin // and the data transmission has been done if (w_data_done) r_data_filled_next = 1'b0; end // or if the tx data is empty else begin // and upstream module's data is ready if (i_valid) r_data_filled_next = 1'b1; end end assign w_data_done = w_status_done & i_tick;
默认的情况下,r_data_filled 为 0 表示 r_data 是没有填充的;如果没有填充过且输入数据有效,那么就将 r_data_filled 设置为 1,表示已经填充;如果已经填充,且表示数据已经完全被发送出去,即 w_data_done 为 1 时将 r_data_filled 设置为 0。
接着,我们需要实现一个计数状态机来控制 r_data 的移位和 r_data_filled 的更新。
//
// r_status
//
// r_status controls TX FSM
//
localparam STATUS_MAX = 11;
localparam STATUS_W = $clog2(STATUS_MAX);
reg [STATUS_W - 1 : 0] r_status;
reg [STATUS_W - 1 : 0] w_status_next;
wire w_status_start;
wire w_status_idle;
assign w_status_idle = (r_status == {STATUS_W{1'b0}});
assign w_status_done = (r_status == (STATUS_MAX[STATUS_W - 1 : 0] - 1'b1));
assign w_status_tick = i_tick & ~w_status_idle;
always @ (posedge i_clk, posedge i_arst)
if (i_arst)
r_status <= {STATUS_W{1'b0}};
else
r_status <= w_status_next;
always @(*) begin
w_status_next = r_status;
if (w_status_start)
w_status_next = {{STATUS_W-1{1'b0}}, 1'b1};
else
if (w_status_tick)
if (w_status_done)
w_status_next = {STATUS_W{1'b0}};
else
w_status_next = r_status + 1'b1;
end
// FSM begins counting when FSM is idle
assign w_status_start = w_status_idle &
// r_data is filled
r_data_filled &
// i_fstcs is ready to receive data
w_fscts &
// to sync with o_fsclk signal
i_tick;
计数状态机的实现并不复杂。默认情况下,计数器为 0 表示接口处于空闲状态;在处于空闲状态下,如果 r_data 已经被填充,FSCTS 信号为高,在保证与时钟同步的情况下,计数器变成 1,然后每个 w_status_tick 有效时加一,知道计到最大状态 10 之后又变为 0,等待 w_status_start 再次变为 1。
最后,有了上述电路,那么输出信号处理就较为简单。
// // output signals // // r_data is ready when r_data_filled is 0 assign o_ready = ~r_data_filled; assign o_fsdi = r_data[0];
对于 o_ready 信号,只要数据发送完毕就可以进行填充;而 FSDI 信号直接取 r_data 的最低位。
为了测试这一接口模块,我们还需要设计另外一个控制模块来产生数据并驱动此接口模块。笔者实现了一个控制模块,支持周期发送和最大带宽发送两种模式选择。限于篇幅,此处不再赘述其实现细节。
控制模块的代码、接口模块的代码、cocotb 仿真代码及 icestick 完整的工程可以在 icestick-oifs 库中 gateware 目录 oifs-tx 子目录下找到。
需要注意的是,由于 icestick 板载晶振频率 12MHz,使用 PLL 倍频出最大符合规范的时钟频率为 99MHz,所以,实际的 FSCLK 的反转频率是 49.5MHz,而非设计时的 50MHz。
FPGA 部分实现完毕后,我们还需要实现 USB Host 侧的软件来接收数据。
USB Host 侧软件
为了实现跨平台的代码,笔者使用 libusb 库进行 USB Host 侧的代码。
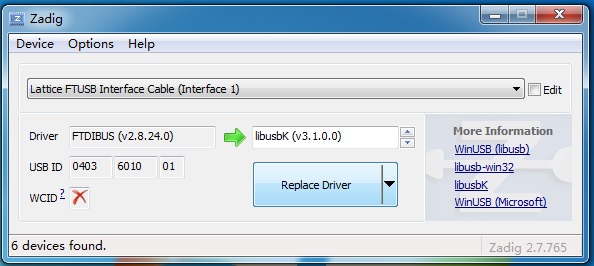
在 Windows 上,读者需要使用 zadig 软件将端口 B 的 D2XX 驱动替换成 libusb 的驱动。如下图所示:
同时,笔者在 msys2 环境下安装 mingw-w64-x86_64-libftdi 和必要的开发工具,用来构建 USB Host 侧的程序。
笔者编写了两个程序,一个程序用来读取数据并计算性能,名为 oifs-rxperf,另外一个程序用来将数据打印到控制台,名为 oifs-rxdump。
USB Host 侧代码可以在 icestick-oifs 库中 software 目录下找到。这些代码可以不用修改或者稍加修改运行在 Linux 平台上。
测试结果
笔者在 Windows 上测试的结果如下:
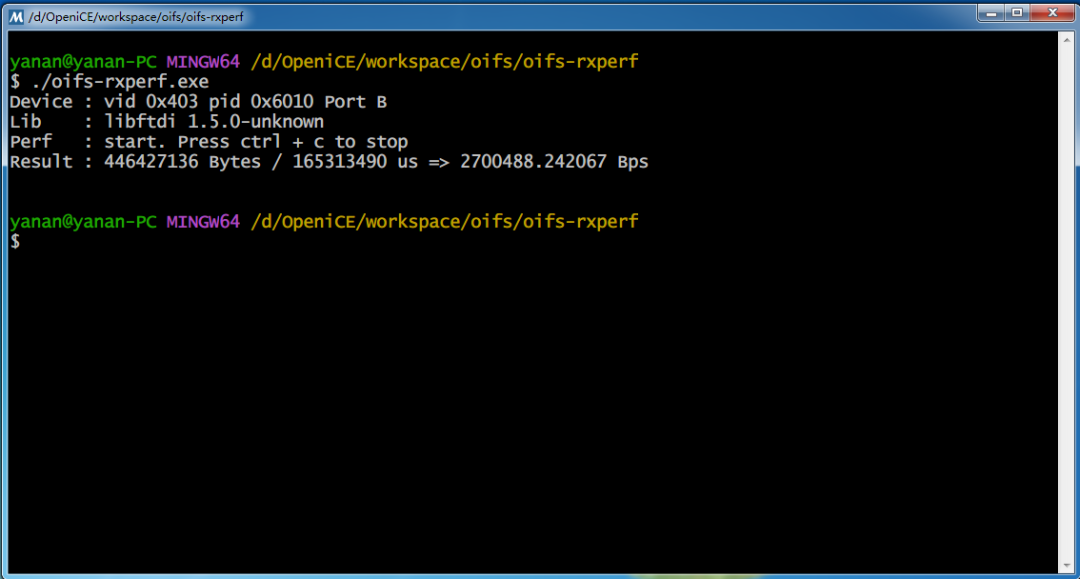
我们可以看到最高的传输速率可以达到 2.57MBps。笔者在 Ubuntu 20.04 和 Ubuntu 22.04 中分别进行了测试,测试结果与 Windows 平台上得到的结果一致。
在接口逻辑仿真环境中,我们假设了 FSCTS 信号总高,但是实际情况并非如此:
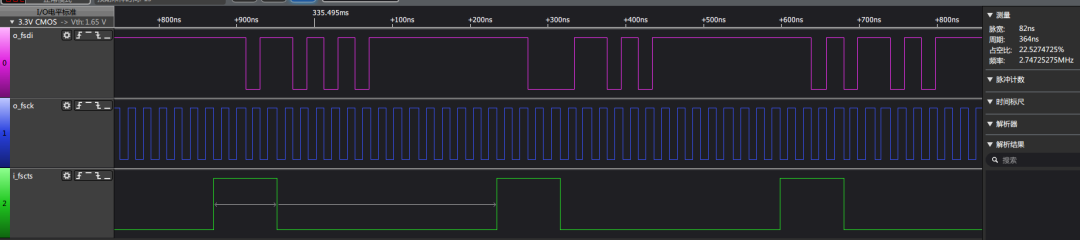
通过逻辑分析仪抓到信号的波形来看,FSCTS 在 DEST 位传输完毕后保持 140ns 的低电平,那么一次传输需要大概 364ns 到 384ns,则极限带宽则约为 2.61MBps。
总结
按照本文的说明及相应的代码,读者应该可以在 icestick 上实现从 FPGA 到 USB Host最高 2.57MBps 的数据传输,从而将 icestick 变成一个 USB 数据采集板。
审核编辑:刘清
-
基于FPGA的USB数据传输2025-08-06 5284
-
是否有方法可以实现从 GPU (OpenCL) 到 NPU 的零拷贝数据传输?2026-05-28 222
-
基于FPGA的高速LVDS数据传输2014-03-01 7025
-
求助 ,关于STM32的USB数据传输问题2017-07-06 2990
-
基于FPGA+USB3.0接口的高速数据传输系统设计2018-08-09 15385
-
汽车行驶记录仪的数据传输设计2018-12-04 2855
-
如何实现ISO数据传输2019-03-26 2408
-
USB数据传输接口电路设计2019-06-17 4890
-
如何实现FPGA和PC之间的数据传输?2019-07-31 3150
-
如何将FPGA变成USB数据采集板呢?2023-03-21 1130
-
基于USB接口的无线数据传输系统设计2009-09-24 990
-
基于FPGA和USB的高速数据传输、记录及显示系统2006-04-16 852
-
基于USB2.0的红外数据传输系统的设计与实现2010-03-13 2120
-
USB2.0+FPGA实现多路数据传输系统2011-09-13 974
-
基于EDMA实现TMS320C64X与FPGA的数据传输2017-10-21 989
全部0条评论

快来发表一下你的评论吧 !
