

无刷电机使用的技术(上)
工业控制
描述
无刷电机具有使其成为速度控制的优秀电机的特性。在本节中,我们将介绍提高这些电机性能的技术。
5.1 宽 速控制范围(低速运行)
我们将解释用于使无刷电机在低速下平稳运行的技术。
5.1.1 低齿槽效应设计
当步进电机轴处于非通电状态时,用手指旋转时感觉到的脉动振动称为齿槽转矩。
无刷电机在其转子中使用永磁体,存储在转子和定子之间气隙中的磁能根据转子位置而变化。转子齿和定子齿彼此定位的角度反复改变磁能;沿途产生齿槽转矩。如果使用具有高能量积的磁铁,也会产生高齿槽转矩。
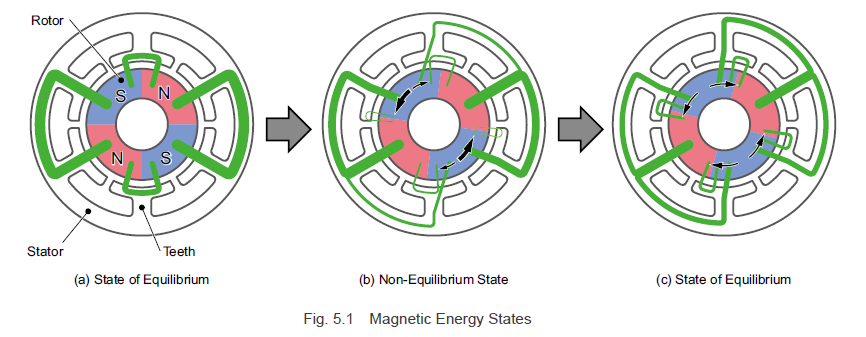
我们现在将使用具有 4 个转子极和 6 个定子槽的电机示例来解释转子角度和磁能状态,如图 5.1 所示。
转子磁铁中产生的磁通量沿着绿线所示的路径穿过定子的铁芯,从北极流向南极。线的粗细反映了磁通量的大小,线向中心的曲率反映了磁能的不平衡状态。此时,在磁通量试图流动的方向(由黑色箭头指示)在转子中产生力,以便它可以变直,或直接对齐。
在图 5.1(a)所示的状态下,所有的磁通量都指向中心,每个槽的磁能很平衡。在图 5.1(b)所示的状态下,转子顺时针旋转 7.5°,面向南极的齿之间的磁能失去平衡,产生方向和大小与黑色相匹配的扭矩箭头。
力矩方向相反,但逆时针方向产生力矩,产生的力矩较大。在图 5.1(c)所示的状态下,转子又顺时针旋转了 7.5°,面向南极的齿之间的磁能失去平衡,并在黑色箭头指示的方向上产生扭矩. 在这种状态下产生的转矩被沿相反方向行进的相同大小的转矩抵消,并且不产生齿槽转矩。
电机运行时也会产生齿槽转矩。
电机在运行时,作为负载转矩的变化,表现出平稳运行,因此在磁设计时需要保持较低。到目前为止,已经对降低齿槽转矩的方法进行了大量研究。
降低齿槽转矩的主要方法有:
适当数量的齿与适当数量的磁极组合
使转子磁体排列或磁体对角线磁化(转子倾斜)
层压定子使其扭曲(定子歪斜)
优化磁铁和定子的形状
优化磁体磁化波形
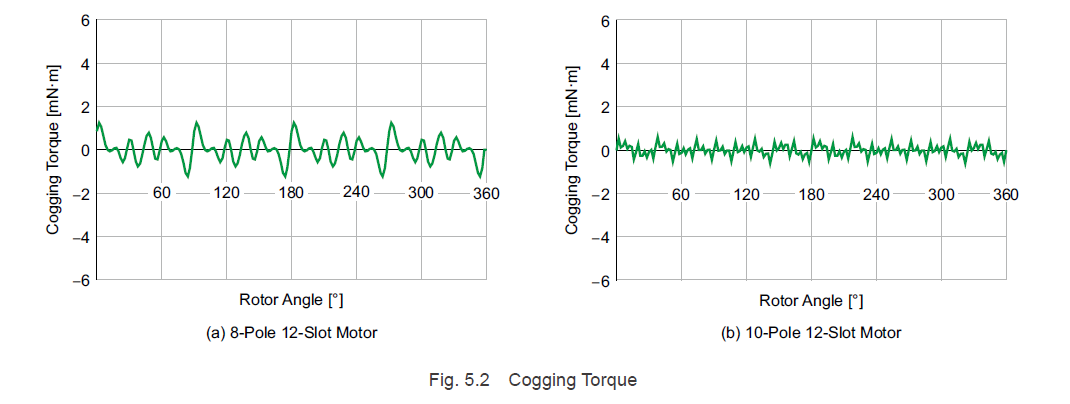
将适当数量的齿与适当数量的磁极组合是抵消齿槽转矩的最有效方法。 一般情况下,电机每转的齿槽转矩周期为磁极数和齿数中最小的公倍数。另外,最小公倍数越大,齿槽转矩越小。
图 5.2 比较了 8 极 12 槽电机和 10 极 12 槽电机的齿槽转矩。8 极 12 槽电机每转的齿槽转矩周期数为 24,10 极 12 槽电机为 60。10 极 12 槽电机产生的循环很好,齿槽转矩幅度明显减小。
Oriental Motor 的无刷电机为 10 极 12 槽型。
5.1.2 正弦波驱动
利用正弦波驱动降低了转矩脉动的幅度,即使在低速旋转时也可以平稳运行。虽然在“3.2.2 正弦波驱动系统”中解释了原理,但在这里我们将解释构成该原理关键的先决条件。
A。作用在绕组上的磁通密度
作用在绕组上的磁通密度理想情况下应该是变化的,使之成为真正的正弦曲线,如式(3.2)所示。如果正弦波发生畸变,电机就会产生转矩脉动,从而引起速度脉动。
为磁通密度创建理想波形的方法与降低齿槽转矩的方法相同,包括以下内容:
齿数与磁极数的最佳组合
应用转子偏斜或定子偏斜
优化磁铁和定子的形状
优化磁体磁化波形
然而,由于降低齿槽转矩的形状与允许获得最佳磁通分布的形状不同,因此磁路的设计需要考虑平衡。
b. 电机电流由正弦波组成
如式(3.6)所示,理想情况下流过电机的电流为正弦波。与磁通密度一样,如果发生畸变,就会产生转矩脉动,进而引起速度脉动。为了创建理想的电流波形,需要精细和准确地检测转子磁极位置。在Oriental Motor,通过使用软件对霍尔效应IC信号进行间歇处理,能够获得高分辨率的转子磁极位置信息。
5.1.3 速度检测精度
无刷电机使用速度计算器将来自霍尔效应 IC 的信号转换为转速并获取有关电机速度的信息。电机低速运行时,霍尔效应 IC 的信号检测间隔变宽,如图 5.4 所示,电机速度检测值呈周期性变化。如果反馈的速度检测值有脉动,速度控制器的电压(电流)指令就会产生脉动,从而导致电机速度产生脉动。
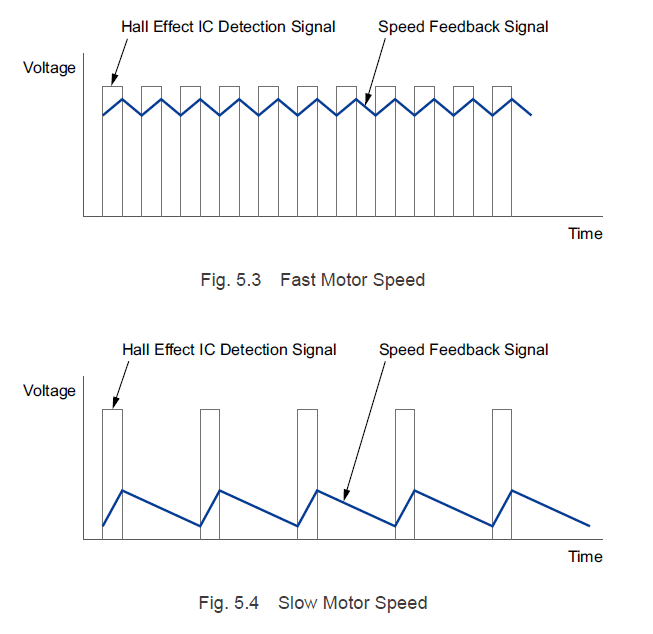
Oriental Motor的无刷电机通过将转子磁极数从4个增加到10个,将霍尔效应IC信号频率提高了2.5倍。这使得低速运行时的反馈信号平滑,减少了电机中的纹波速度。
由于无刷电机使用传感器来检测磁极,因此它们不适合低速运行。但是,随着磁分析技术、软件信号处理技术和驱动技术的改进,最低运行速度已从4极电机的300转/分降低到80转/分。 此外,即使在最低速度下输出扭矩也恒定,因此可以在较宽的速度范围内实现平稳的旋转控制。
5.2 宽 速度控制范围(高速 运行)
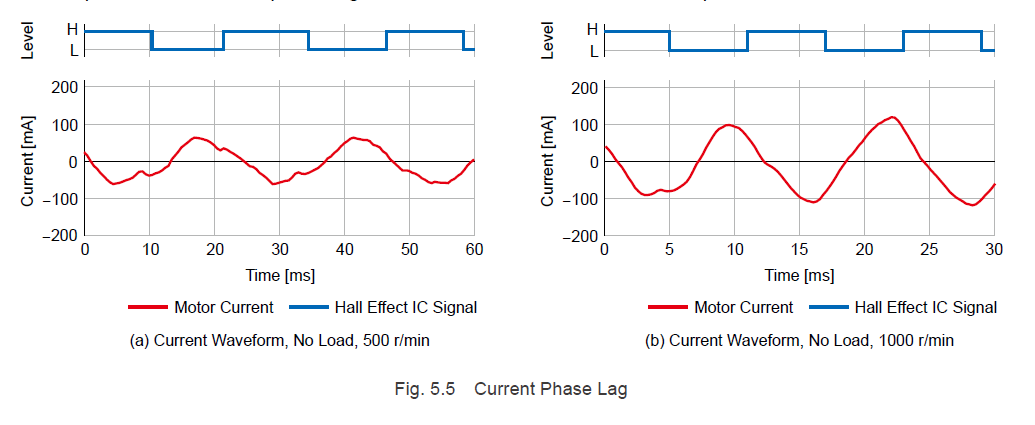
霍尔效应IC信号波形和电机电流波形如图5.5所示。
与 500 RPM 相比,关于霍尔效应 IC 信号,在 1000 RPM 时可以观察到电流波形滞后和电机电流增加。
对无刷电机进行驱动时,根据霍尔效应 IC 信号和励磁模式向绕组施加电压。但是,如果转速增加,则由于电机电感,电流相位会出现滞后。 电流相位中出现的滞后对电机中产生的扭矩产生无效电磁力,从而降低有效电磁力。由于电机执行控制以保持转速,因此电流增加并产生必要的扭矩。此外,如果速度增加,相位滞后增加,旋转停止。
现在我们将解释用于校正电流相位滞后的方法,这是使高速操作成为可能所必需的。
5.2.1 相位控制输出转矩校正
超前角控制允许通过根据电机速度计算电流相位滞后并提前电压相位来校正输出扭矩。
电压相位超前的值称为“超前角” a,可以使用以下公式计算:
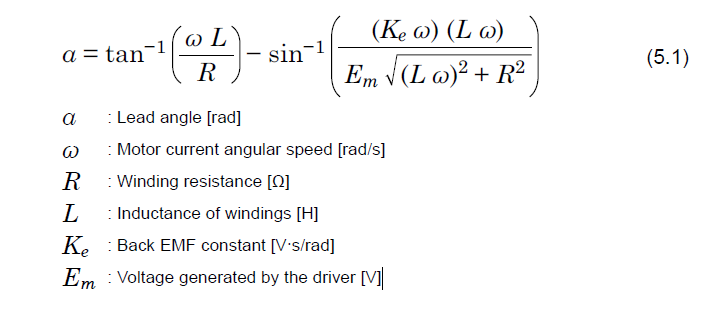
然而,执行如此复杂的计算需要具有高处理能力的CPU。因此,不直接使用公式进行计算,而是使用超前角的近似公式进行计算。
超前角与转速的关系如图5.6所示。在超前角较大的区域。由于它相对于转速几乎呈线性变化,因此可以使用线性近似公式来表示超前角与转速之间的关系。
同样,超前角与外加电压的关系也可以表示为线性近似,因此可以根据转速和外加电压计算出超前角。
然而,由于仅使用线性近似会导致在低速、高负载操作期间由于过度的相位超前而导致效率和转矩降低。实际上,对超前角值施加了限制。
这种控制系统的优点是电路配置简单,因为不需要电流环,并且电机控制调节元件很少。
5.2.2 矢量控制
矢量控制是利用数学技术将流过三相电动机绕组的电流转换成与直流电动机等效的模型,从而简化控制的一种控制方法。
流经无刷电机 U、V 和 W 相的电流由于电机扭矩和转子旋转角度而不断变化。在这些条件下,电流控制的计算处理很困难。但是,通过将三相电流转换为两相电流,将固定坐标转换为旋转坐标,可以将电流分为产生扭矩的分量(电流的 q 轴分量)和产生磁通量的分量分量(电流的 d 轴分量),与转子旋转角度无关。
在这种状态下,通过构建一个电流回路,从产生转矩的 q 轴分量和产生磁通量的 d 轴分量的电流中获取检测值,并遵守指令值,输出转矩和通过的磁通量通过绕组(磁链)可以随意控制。
由于可以分别控制输出转矩和磁链,因此可以高度响应地控制输出转矩和速度。
此外,通过控制磁链,可以实现节能操作的最大效率控制。还可以改善速度-转矩特性,例如最大转矩控制和弱磁控制。
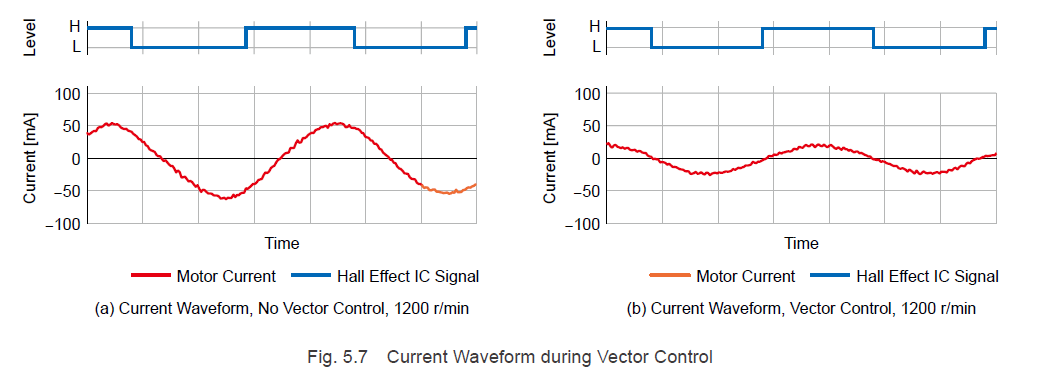
通过矢量控制改善电流波形的例子如图 5.7 所示。图 5.7(a) 为无矢量控制时的电流波形,图 5.7(b) 为有矢量控制时的电流波形。在驱动电路中,电机电流受到控制,使其通过霍尔效应 IC 输出信号的上升沿从负切换为正。
在没有矢量控制的情况下,可以观察到电机电流滞后。
在图5.7(b)中,霍尔效应IC信号上升沿与电流切换一致,电流相位滞后消失。此外,执行矢量控制会使电机电流值变小。
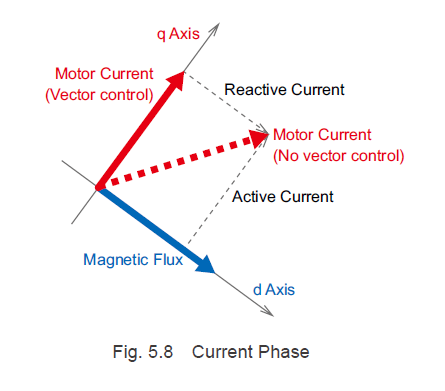
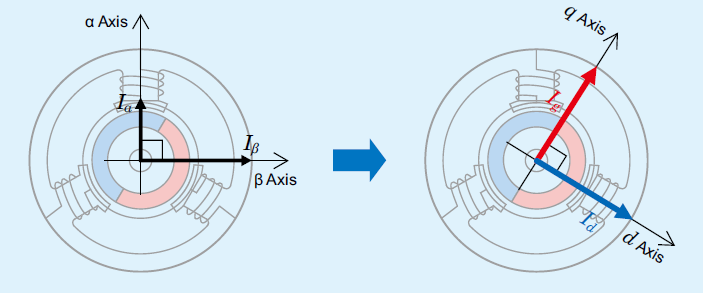
将图 5.7 所示的矢量控制状态和无矢量控制状态显示为使用旋转坐标的电流矢量创建如图 5.8 所示的图形 l(逆时针旋转时)。
不进行矢量控制时,相对于磁通相位的定向(红色虚线所示)小于 90°。电机电流除了起转矩作用的有功电流(电流的q轴分量)分量外,还包括不起转矩作用的无功电流分量。
执行矢量控制时,电流相对于磁通量以 90° 的方向流动。利用矢量控制始终保持磁通和电流方向为90°,消除高速运行时的电流相位滞后和无功电流,实现高效运行。
TIP : 矢量控制原理
1. 检测电机电流值Iw、Iv、Iw。
2.将三相电流值转换为正交2轴2相电流值[克拉克变换]。

值Ia和Ib随每个转子角度而变化。
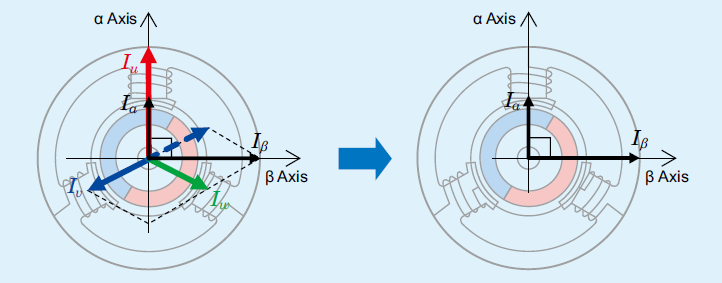
3. 对于两相电流值,将坐标系从固定坐标变换为与转子同步旋转的旋转坐标[Park变换]。
通过变换坐标系,使d轴方向固定在磁场方向上,就可以将电流当作直流电,就像直流电机有旋转导体一样,使计算变得更加简单。

值 Id 和 Ia 是与转子角度 θ 无关的常数。
4. 将实际的Id(电流的d轴分量)和Iq(电流的q轴分量)与指令值进行比较,找出差异。
5. 控制电流环中的施加电压,使电流指令值与Id和Iq匹配。
5.2.3 弱磁控制
弱磁控制是指通过控制电流的d轴分量,使产生磁通量的部分(磁场)的磁通量减弱,从而提高电机高速运转时的转矩。
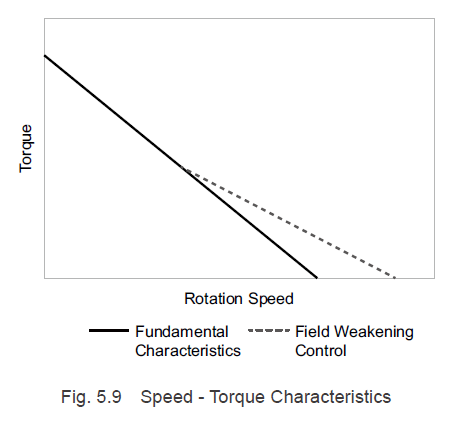
无刷电机的基本特性是倾斜转矩特性,如图 5.9 所示。电机中产生的转矩与电机电流成正比,因此转速越高,电流值越小。我们将在下面解释其原因。
无刷电机旋转时各区域的电压用下式表示。
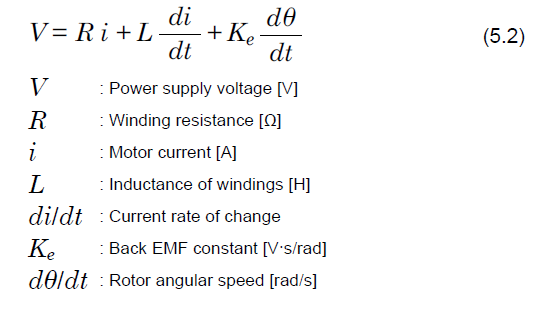
式(5.2)左边表示施加电压,右边第一项是施加在绕组电阻上的电压,第二项是电感分量产生的电压,第三项是反电动势。
由式(5.2)得:

如式(5.3)所示,如果电机转速增加,电感分量会导致压降增加,反电动势升高,电机电流减小。因此,无刷电机的速度-转矩特性为如图5.9所示的倾斜特性。
通过在高速运转时进行弱磁控制,使电流流向d轴的负方向,弱化磁场的磁通量,可以降低绕组中产生的反电动势。
因为当反电动势减小时电流变大,所以产生的转矩增加。这允许扩大高速运行期间使用的速度范围(图 5.9)。
5.3 高精度 速度控制
5.3.1 调速
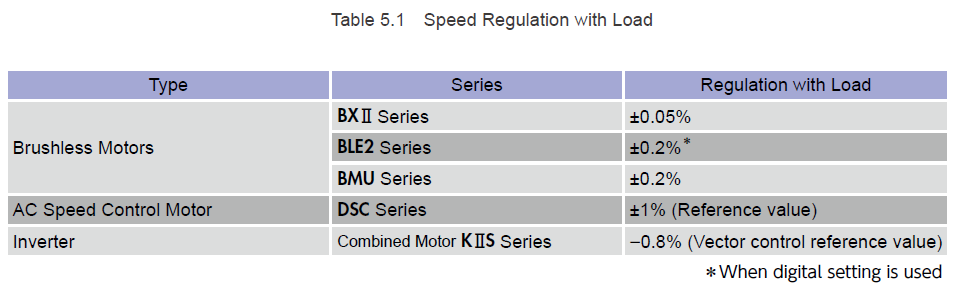
速度调节是用于速度控制的电机的重要规格。定义为电机以设定速度运行时,负载转矩、电源电压、环境温度等使用环境因素发生变化时,速度的变化率。
Oriental Motor 的规格使用以下条件发生变化时额定转速下的速度变化率。因此,如果额定转速为 3000 r/min,速度调节为 +/-0.2%,则速度变化为 +/-6 RPM。
由于速度波动范围取决于传感器检测精度,即使运行速度不是 3000 r/min,速度变化量仍可能约为 +/-6 RPM(在电机轴处)。
With Load:当施加额定负载时,假设为空载状态
With Voltage:当电压在允许范围内变化时,假设为额定电压
With Temperature:当温度在环境工作温度范围内变化时,假设环境温度为 25°C。
无刷电机闭环控制电机转速;基于从霍尔效应 IC 信号计算的反馈速度。 由于转子的多极性,来自霍尔效应IC的信号数量增加,提高了转速的检测精度,从而导致低速调节,并允许以接近指令速度的速度运行。
对于没有速度检测器并执行无传感器速度控制的变频器 (VFD),转速会随着额定转矩的变化而变化。
由于精确的速度调节,可以通过具有可变负载和重量的输送机稳定运行,例如液体粘度变化的搅拌器或排放泵等。此外,这适用于涂装、加热和其他需要固定处理时间的运输应用。
提示:速度调节和颤振特性之间的差异
除速度调节外,颤振特性是电机速度稳定性的另一个特性。
Speed Regulation:使用环境变化时产生的平均速度波动率
Flutter Characteristic : 匀速旋转时平均速度的速度波动率。
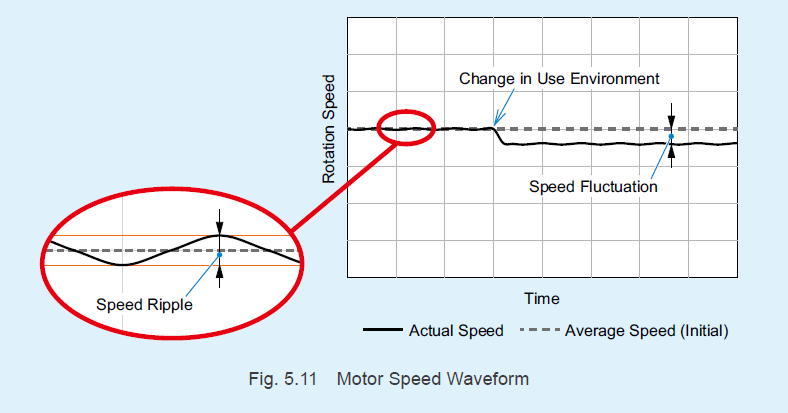
速度波动是指电机本身的平均速度在变化,而速度脉动是指在平均速度一定的情况下,速度变化的实际幅度。
速度波动是由电机单次旋转或执行速度控制期间的转矩波动产生的。在图像检测设备上表现为画面抖动,在镀膜设备上表现为镀膜不一致。
5.3.2 高可靠性
此外,通过利用过载信息和过载警告功能,可以在过载警报激活之前检测到负载增加。 这可以防止生产线突然停止并进行系统维护。 我们之前解释过,由于无刷电机根据霍尔效应 IC 信号计算出的反馈速度在闭环中控制电机速度,因此速度调整率低,可以稳定运行。
由于始终监控电机速度,如果由于某种原因施加过大负载导致速度降低,或者如果电机停止,则会输出警报信号,从而可以检测到故障。
5.4 稳定停止位置
在进行高精度定位作业时,一般采用步进电机和伺服电机,定位精度优良。但是,根据要求的精度和使用方法的不同,使用廉价的调速电机或交流电机,即使是简单的定位动作,也有可能满足定位精度的要求。
当需要在目标位置停止输送物体和旋转物体时,使用具有瞬时停止功能的速度控制器和驱动器。但是,为了检测搬运物,需要在停止位置设置传感器,通过可编程控制器等进行控制。
输入停止信号时,由于转子转动惯量和负载转动惯量的作用,电机超速停止。此时,超程量根据装置中摩擦转矩的大小而减少。
5.4.1 超限额
DSC 系列 25 W 交流调速电机和 BLE2 系列 30 W 无刷电机的制动特性如图 5.12 所示。
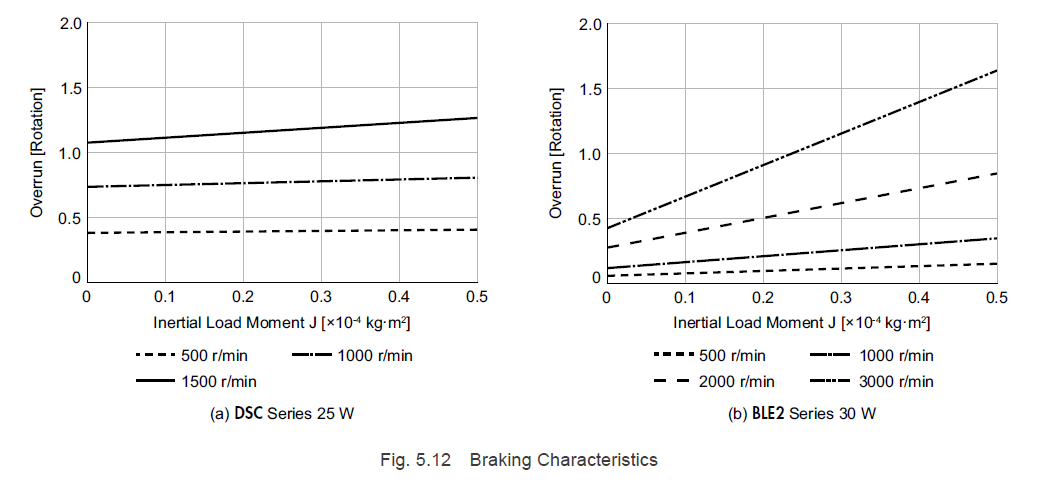
这些制动特性表示无摩擦负载时负载惯性力矩与超限量(平均值)之间的关系。由于在高速或大惯性负载下旋转能量较大,因此超程量也会增加。
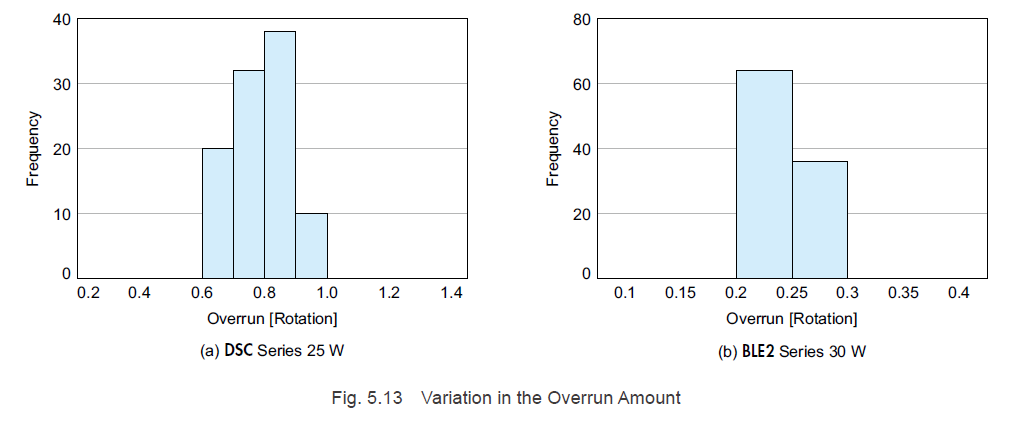
5.4.2 超支量的变化
交流调速电机和无刷电机的超限量都有差异。图 5.13 显示了当负载惯性力矩 J 设置为 0.251 x 10^-4 kg-m²,转速设置为 1000 r/min 时电机重复运行和制动 100 次时超程量的变化。
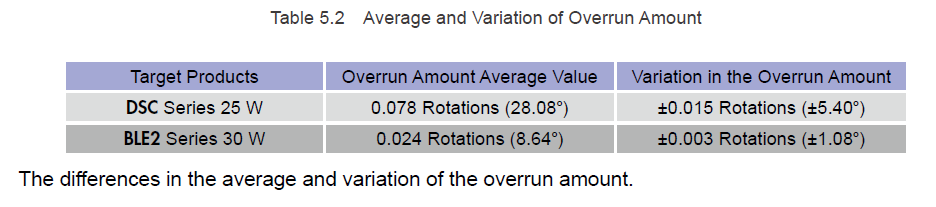
许多交流调速电机和无刷电机都与减速机组合使用。
例如,与减速比为 10 的减速机组合时,在齿轮轴上测得的平均超程量及其变化量将减小到表 5.2 中所示的值。但是,应将齿轮中 1° 至 2° 的齿隙添加到这些值中。
5.4.3 交流调速电机制动方式
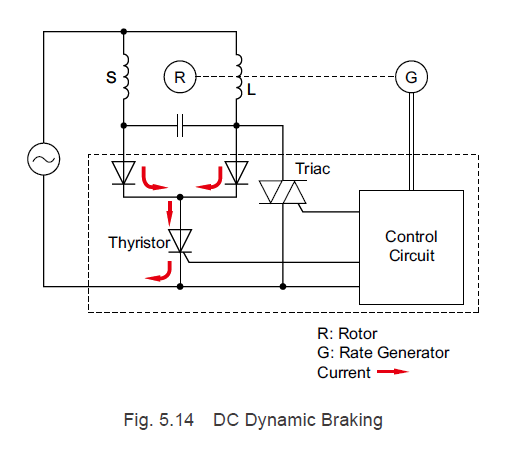
交流速度控制电机通过基于双向晶闸管的触发角控制来控制施加到电机的电压。当输入制动信号时,双向晶闸管断开,晶闸管导通一段固定的时间。如图5.14中红色箭头所示,二极管中流过电机主绕组(L)和辅助绕组(S)经过半波整流的同相电流。这会导致执行直流制动(AKA 动态制动),从而立即停止电机。
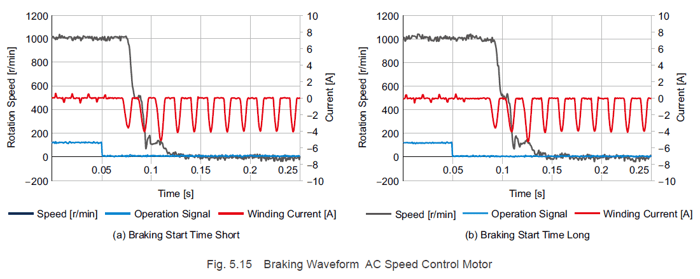
由于制动信号在电源电压阶段输入的时序,制动电流开始流动的时间(制动开始时间)最多滞后于电源频率一个周期。因此,超限额会发生变化。
运行信号、制动电流和电机转速之间的关系如图 5.15 所示。比较左右图可知,从运转信号OFF(制动信号ON)到制动开始、电机停止为止,有一个电源频率周期的间隔。
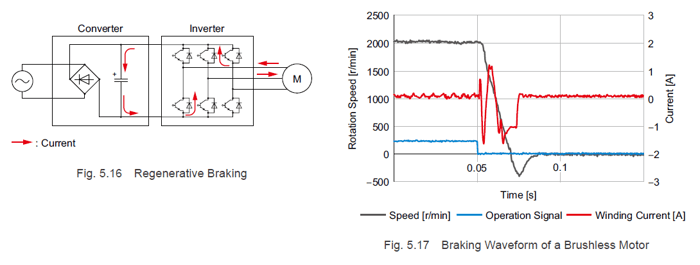
5.4.4 无刷电机制动方式
如“4.5 制动(再生运行)”中所述,无刷电机在制动过程中作为发电机工作,通过将旋转能量转换为电能来产生制动扭矩,如图 5.16 所示。观察图 5.17 可知,运转信号 OFF(制动信号 ON)后,再生电流直接流过绕组。由于在电源电压阶段不受制动信号输入时序的影响,可以产生制动力矩,因此停止位置稳定。
审核编辑:汤梓红
-
无刷电机弱磁控制:技术原理与实战应用2025-08-01 10374
-
图解无刷电机原理2010-05-27 11831
-
无刷电机的基本概念和参数介绍及无刷电机在模型上的应用资料免费下载2018-09-21 5676
-
无刷电机的好处和坏处_无刷电机的作用_无刷电机的使用寿命2020-03-17 106254
-
BLDC直流无刷电机驱动2021-09-18 5208
-
无刷电机使用的技术(下)2023-03-09 2607
-
无刷电机的好处 无刷电机寿命2023-03-16 9476
-
差速电机与无刷电机的区别是什么 差速电机和无刷电机哪个好2023-03-27 16651
-
DD无刷电机和BLDC无刷电机的区别2023-07-17 2930
-
如何分辨无刷电机和伺服电机2023-10-15 7312
-
无刷电机谐波怎么调 无刷电机为什么要电调2023-12-20 3538
-
无刷电机和有刷电机的优缺点 无刷电机工作原理2024-01-31 9602
-
无刷电机是什么意思 无刷电机是交流还是直流2024-02-01 20665
-
无刷电机技术的优势与应用前景2024-06-26 3868
-
其利天下技术·低速无刷电机如何更好的控制?无刷电机驱动方案开发2024-09-09 1265
全部0条评论

快来发表一下你的评论吧 !
