

无刷电机驱动系统详解
工业控制
1285人已加入
描述
驱动系统与无刷电机的特性有着密切的关系,人们已经采用各种方法来改善电机的可控性和特性。在本文中,我们将解释两种典型的驱动系统:方波驱动和正弦波驱动。
电机驱动系统
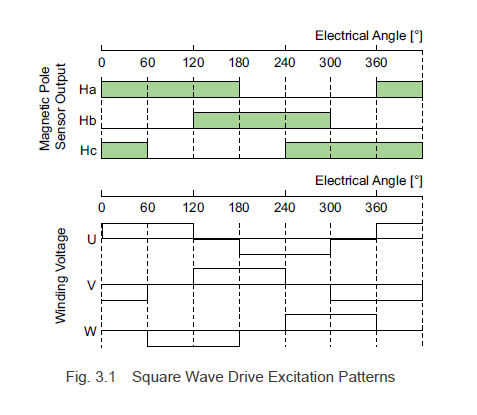
3.1.1 方波驱动系统(120°导通方式)
无刷电机驱动系统有很多种,120°导通方式的方波驱动就是一个常见的例子。如图 3.1 所示,该方法涉及根据霍尔效应 IC 输出信号的组合来切换激励状态。虽然在低速运行期间会出现速度纹波,但可以通过简单的电路实现高输出功率。因此,它被广泛用于控制办公自动化设备和功率设备的无刷电机。
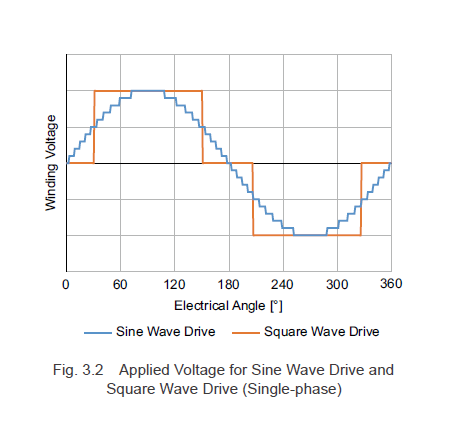
3.1.2 正弦波驱动系统
如图 3.2 所示,正弦波驱动系统是对施加电压进行精细控制,使电机电流呈正弦波的驱动系统。该驱动系统具有少量扭矩波动并允许稳定旋转。此外,它还降低了驱动电机时产生的噪音。
然而,为了进行正弦波驱动,需要准确地检测转子磁极位置。传统上,需要高分辨率编码器,但这有增加电机总长度和成本的缺点。
近年来,而不是使用编码器:
软件已用于处理霍尔效应 IC 信号。
已使用电机电感和反电动势进行检测。
因此,现在可以使用各种其他方法检测磁极位置并执行正弦波驱动。
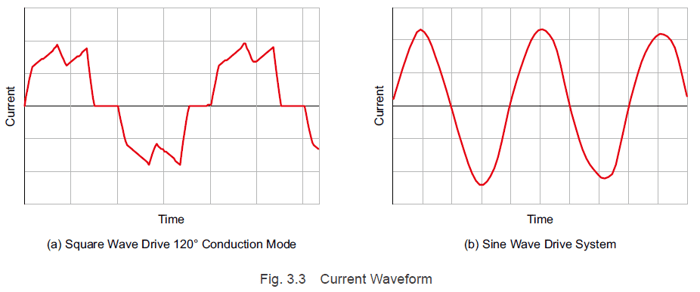
3.1.3. 每种驱动系统的电流波形
实际电流波形如图 3.3 所示。方波驱动器相对于施加的电压波形具有失真,实际上它在形式上比方波更接近正弦波。正弦波驱动器的波形类似于外加电压波形。
在接下来的几篇文章中,我们将解释驱动系统如何影响电机的性能。
审核编辑:汤梓红
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
无刷电机的驱动原理及驱动电路解析2026-05-13 348
-
无刷电机的驱动原理 直流有刷电机和无刷电机的差异2024-07-19 3943
-
无刷电机是什么意思 无刷电机是交流还是直流2024-02-01 20667
-
无刷电机驱动板怎么接线2023-12-14 9033
-
无刷电机与驱动2023-05-16 1431
-
无刷电机驱动系统和电机转矩详解2023-03-09 4558
-
BLDC直流无刷电机驱动2021-09-18 5215
-
详解无刷电机和有刷电机的区别在哪里?2021-06-26 2799
-
图文详解:无刷电机的绕制和接线方法2021-05-25 10801
-
无刷电机为什么不用铁氧体_无刷电机驱动原理及结构图2018-05-09 43199
-
无刷电机驱动方案大全PPT下载2018-01-10 2315
-
无刷电机驱动原理图2016-12-30 4918
-
驱动你的无刷电机2013-09-05 1388
-
采用霍尔元件的无刷电机驱动电路2010-08-30 2434
全部0条评论

快来发表一下你的评论吧 !
