

带 AlphaStep 绝对式步进电机的 3 轴并联机器人
电子说
描述
还记得我们过去常常参加贸易展览等面对面活动的日子吗?机器人演示总是在展位上产生大量的客流量。有什么比 3 个电机协同工作以产生一种特定运动更能说明闭环步进电机的同步性?
幸运的是,多亏了互联网,我们现在可以通过数字方式分享产品演示视频。并联机器人,或称 delta 机器人,一直因其独特的设计而让我着迷(可能还因为它与攻壳机动队中的 Tachikoma 蜘蛛机器人略有相似)。
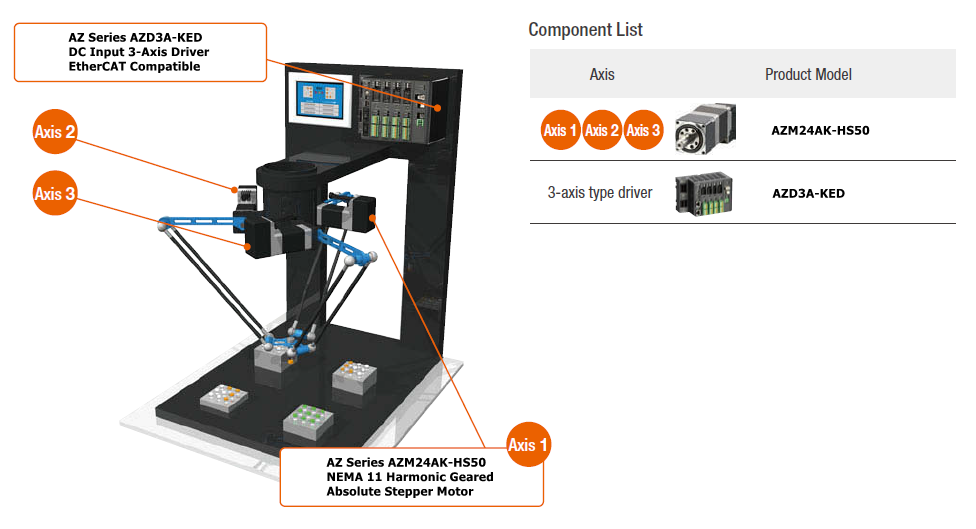
这是我们使用 AZ 系列绝对式步进电机和驱动器构建的 3 轴并联机器人演示。由于电机和驱动器是即插即用的,并且包含内置机械绝对编码器,我们可以跳过传感器安装、接线和测试。我们在没有花费太多工程时间的情况下快速完成了演示。
对于多轴电机应用,为所有运动轴选择相同的产品系列会很有帮助。Oriental Motor 提供相同的 AZ 系列技术,具有全系列的框架尺寸和传动装置选项;还包括旋转和线性执行器。对所有这些产品使用相同的专用驱动程序的优点是减少了学习曲线;特别是对于编程。
使用 AZ 系列构建演示变得简单。我们可以使用的产品范围很广,除了 HMI 软件之外,我们不需要学习太多其他东西。最重要的是,我们避免了外部住宅、限位传感器、绝对编码器和电池的接线。 内置机械绝对传感器无需备用电池即可实现绝对定位,与伺服电机系统上的绝对光学编码器相比,这是一个优势。
经过电机选型过程后,选择了具有 50:1 谐波齿轮箱 (AZM24AK-HS50) 的 NEMA 11 等效框架步进电机。电机的小尺寸是由于唯一的惯性负载是连杆臂。连杆臂的重量很轻,因此我们不需要很大的扭矩或承受很大的负载惯性。选择零背隙谐波减速机是为了确保极其精确、双向和可重复的运动,同时保持电机尺寸小。
选择多轴 EtherCAT 驱动器是为了节省空间并能够与 HMI 通信。能够通过 EtherCAT 远程访问 I/O 为我们节省了大量物理布线 I/O 的时间。Oriental Motor 提供一个 EtherCAT 驱动器来控制多达 4 个轴。
< >
小型、轻量、高精度的谐波减速电机
框架尺寸:28/30 毫米
每个减速电机的质量:0.24 kg
零背隙谐波减速机
< >
内置机械式绝对编码器,无需电源
即使关闭电源,绝对位置信息也会保留
避免使用外部传感器或编码器
< >
多轴驱动器改善了通信并最大限度地减少了占地面积
兼容 EtherCAT、MECHATROLINK-III 或 SSCNETIII/H。
提供 2 轴、3 轴或 4 轴类型。
现在,废话不多说,请欣赏三轴并联机器人如何从一个托盘上拾取零件并将其放置在另一个托盘上的短片。
| 认识 AlphaStep 家族 |
|
“AlphaStep”名称定义了为其原始 AS 系列步进电机提供动力的专有闭环技术,现在仍在使用“混合控制”技术。如今的 AlphaStep 系列包括最初的 AS 系列以及更新的 AR 系列和 AZ 系列步进电机和专用驱动器。在过去的几年中,该系列扩展到包括线性和旋转执行器。 AS 系列于 1998 年首次推向市场,其核心技术是混合控制技术。步进电机通常在开环模式下工作,但在必要时借助内置解析器生成的反馈回路切换到闭环模式。 < >了解αSTEP 的工作原理 2007 年,AR 系列发布,采用获得专利的低损耗转子和定子设计。低损耗特性允许步进电机连续工作循环,这使其能够更好地与伺服电机竞争。然而,与绝对编码器类似,其解析器反馈系统需要电池来进行绝对位置控制。 随着近年最新推出的AZ系列,东方马达在保留AS系列和AR系列2项技术的基础上,增加了免电池绝对定位功能,并采用了获得专利的“ABZO”多旋转机械绝对编码器。 AZ 系列将所有 3 种技术结合到一个产品中,为伺服电机系统提供了一种可行的替代方案。有关详细信息,请参阅此博客文章或网站。 |
审核编辑 黄宇
-
并联机器人快速准确拾取物体2016-09-14 20569
-
运用BLDC设计新型五自由度并联机器人的方案分享2019-06-02 3252
-
分享一款不错的基于LabVIEW的6-DOF并联机器人控制系统2021-05-12 1908
-
并联机器人的带分离干扰补偿器的离散变结构控制研究2010-03-03 885
-
基于LabVIEW和PXI的并联机器人控制系统2011-04-02 1348
-
并联机器人的特点及其运动模拟器等相关设计的介绍2017-10-17 1771
-
并联机器人机构特点及其设计与分析2017-10-21 1975
-
并联机器人市场又情况如何市场活跃度最高的并联机器人企业TOP52018-11-03 6274
-
拖动示教测试在并联机器人应用领域实现零突破2018-12-07 1874
-
2019,并联机器人增速几何?2019-03-08 1222
-
勃肯特推出并联机器人 进入了结构全新升级阶断2019-11-14 1410
-
Stewart并联机器人的独特优势和应用范围2020-06-21 5915
-
并联机器人控制2021-04-20 1144
-
并联机器人如何优化、简化电子制造流程2023-05-24 9968
-
并联机器人和串联机器人的区别是什么?2024-01-26 6815
全部0条评论

快来发表一下你的评论吧 !
