

为机器人安全限制电机运行范围的简单方法
电子说
描述
在工业机器人领域,有几种类型的机器人通常提供多轴运动来完成零件装配、物料搬运或拾取和放置操作等任务。这些包括铰接式机器人、笛卡尔/龙门式机器人、SCARA 机器人和 Delta 机器人。可以将各种末端执行器(例如夹持器、焊机或零件旋转器)安装在手臂的末端以执行不同的任务。根据轴数或负载能力,成本很容易增加。限制这些机器人运动轴的操作范围是防止以后出现代价高昂的问题或安全问题的简单方法。
避免机械臂与其周围环境接触可能有助于防止代价高昂的产品损坏甚至人身伤害,同时保持生产正常运行时间。
|
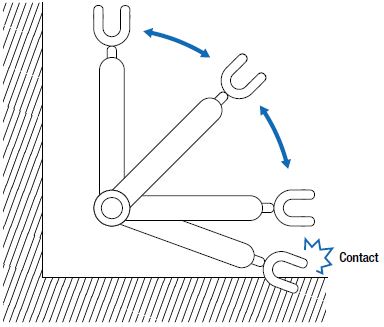
在处理受限空间内的运动范围时,可能很难避免机械臂撞到某物,尤其是在没有复杂算法和视觉传感器的情况下。根据力或速度等因素,这可能意味着对操作人员的伤害或产品损坏,这两者都会增加生产成本并降低生产效率。 为了解决这个问题,必须使用外部限位传感器来限制电机的运行范围。这些需要额外的空间、专业知识、库存和布线。 |
 |

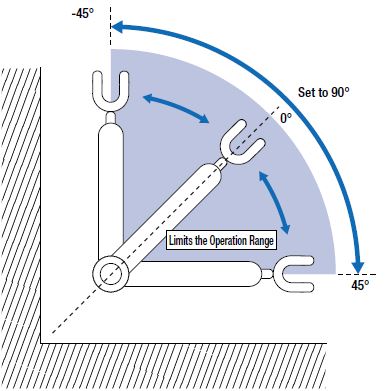
在电机和驱动系统中使用软件限制参数,以步数、度数或毫米的形式防止电机在限制区域内运行。您还可以控制电机如何停止。

|
许多用于控制这些运动轴的电机系统(伺服、步进)通常提供软件限位,可用于与外部限位传感器相同的目的。当软件限制设置并存储在驱动器或控制器中时,电机将仅在安全区域内运行,不会造成伤害或损坏。 该参数通常包含在许多电机和驱动系统的软件中。然而,许多机器设计人员仍然使用限位传感器、编码器和/或软件限位的组合来实现多层保护。使用绝对编码器时,可以取消外部传感器,但需要额外的硬件(例如电池)来保留位置信息。 |
 |
|
当软件限制与 一起使用时,可以消除额外的硬件,例如电池、编码器和用于归位或限制的外部传感器。这确实有助于缩短设计周期并降低库存要求。此外,在发生意外中断(例如停电)后可以立即恢复操作,而无需先执行归位操作,从而消除了生产延迟。 < >带内置无电池机械绝对传感器的电机 相关帖子: < >以绝对坐标运行的索引表 为了帮助解释无传感器绝对定位的优势,我们使用 AZ 系列绝对步进电机构建了一些机器人演示,无需外部归位或限位传感器。 |

对于 Oriental Motor 的 电机和执行器,软件限制参数可以在. < >AZ系列 < >MEXE02支持软件
请参阅下面的屏幕截图示例,以在 MEXE02 支持软件中找到这些参数。下面的参数将允许机械臂(如上图所示)在与水平位置(0 位置)成 45 度的起始位置时,在任一方向上移动 45 度。如果电机行驶到 +45 或 -45 度限制之外的设置限制,则电机将减速至停止,然后其驱动器将发出警报。
指示:
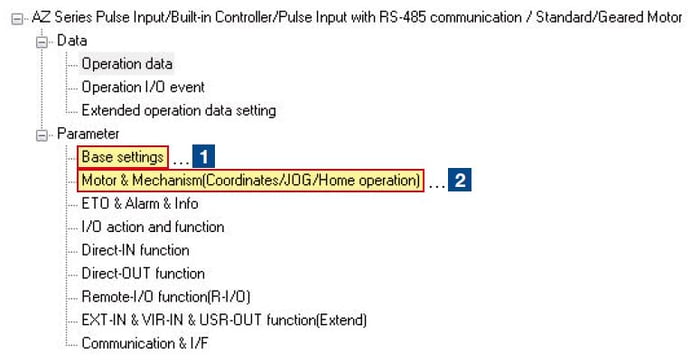
在 MEXE02 软件窗口中,单击参数下的基本设置。这是在左上角。请参阅下面的第一张图片。确保您的单位设置为“度”。
在第 28 行为 POSITIVE SOFTWARE LIMIT 输入“45.00”。
在第 29 行为 NEGATIVE SOFTWARE LIMIT 输入“-45.00”。
单击 PARAMETER 下 BASE SETTINGS 下的 MOTOR & MECHANISM。
确保在第 11 行的初始坐标生成和包裹坐标设置中选择了“优先 ABZO 设置”。




就是这样。哦还有一件事。请记住将数据写入驱动程序以保存这些参数。这非常重要,除非您想再次重复此操作。
审核编辑 黄宇
-
浅谈儿童陪护机器人2023-05-11 1183
-
ABB机器人控制柜报警相关数据恢复的维修介绍2020-09-18 3747
-
安川机器人伺服电机维修,常见机器人伺故障服电机和维修方法2020-06-30 6799
-
智能巡航并将机器人怎么实现状态显示输出?2020-03-17 2369
-
机器人、协作机器人和移动机器人,你分的清楚吗2018-10-30 4137
-
盘点机器人常用的三种电机2018-10-25 5386
-
如何选择机器人电机2018-10-19 2732
-
如何保障桁架机器人的安全2018-09-29 3162
-
直角坐标机器人如何选型2017-08-16 5002
-
美国机器人送快递啦2015-12-31 5206
-
工业机器人所用的电机驱动系统2015-01-23 7715
-
排爆机器人的设计与应用2013-10-18 8
全部0条评论

快来发表一下你的评论吧 !
