

通过多个扭矩限制设置改善抓取操作
电子说
1.4w人已加入
描述
机器人夹持器通常用于夹持零件以进行运输。夹持器背后的驱动力可以是气动的、液压的或电动的。哪种类型最适合抓握?
答案取决于应用要求和负载的大小。虽然液压的高功率和气动的成本效益可能对某些人有吸引力,但应考虑电动机的一致性、效率、易于维护和内置驱动器功能。
在这篇文章中,我们将解释扭矩限制功能如何使无刷电机成为一种非常可行的夹具解决方案。
挑战: 逐渐增加夹持力以牢固地夹持负载
 |
传统夹持器 夹具上装有气动装置,可夹住负载并将其输送到下一道工序。 气动夹具的问题 在搬运一定质量的重物时,由于夹持力不一致,夹持器可能会掉落负载。 |
解决方案: 使用扭矩限制功能逐渐增加夹持力
扭矩限制功能可用于按电机额定扭矩的百分比递增地降低或增加电机扭矩。它可用于 Oriental Motor 的许多闭环电机系统。
 |
实际应用示例 扭矩限制功能提供优化的多级夹持力,逐渐增加夹持器的夹持力,并在不损坏负载的情况下安全地夹持负载。 怎么运行的 电机的扭矩可以通过流过其绕组的电流量来增加或减少。扭矩限制功能监测和控制电机电流以限制扭矩。 |
|
如何使用 在运行之前,使用驱动器的前面板或 MEXE02 支持软件以数字方式设置所需扭矩限制设置的数据。 启动电机并用低扭矩限制设置轻轻抓住负载。当电机超过设定的扭矩限制时,TLC 输出将打开。 一旦 TLC 输出打开,切换到高扭矩限制设置。 如果 TLC 输出保持 ON,则表示负载已牢固夹持,因此可以开始运输过程。 |
时序图 - 扭矩限制功能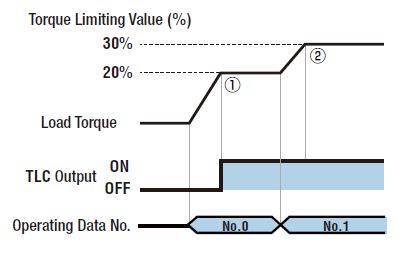 |
|
具有 16 种不同的速度和扭矩限制设置,相同的 BLE2 系列无刷电机和驱动器可以针对各种负载进行配置。* *对于闭环步进电机系统,最多可提供 256 种设置。 |
  |
| 输出功率 | 30 瓦、60 瓦、120 瓦、200 瓦、400 瓦 |
| 转矩限制设定范围*1 | 0~300% |
| 最大设置数 | 16 |
| 扭矩限制精度*2 | ±10% |
| 速度控制范围*3 | 80~4000转/分 |
*1:额定转矩值为100%时的值。
*2: 最大错误。由于设置速度、电源电压和电机电缆延长长度,设置值和产生的扭矩之间可能会出现大约 ±10%(在额定扭矩和额定速度下)
。
*3:也可提供速度控制范围为2~4000r/min的BXⅡ系列。
审核编辑 黄宇
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
丹佛斯电控扭矩限制器助力提高电动设备性能2024-09-23 1520
-
示波器带宽限制怎么设置2024-05-17 9171
-
风阀驱动器的最大输出扭矩设置的说明2021-01-06 2592
-
如何通过多个指标因素确定LED电源的可靠性2020-09-08 4338
-
贝加莱伺服驱动器性能更强 还具有安全限制扭矩功能2019-11-14 1757
-
PMSM FOC中的扭矩限制2019-06-18 2730
-
请问扭矩模式和限制速度怎么弄?2018-06-14 9045
-
盘点电机扭矩的测量方法有哪些2017-11-08 14670
-
FPGA的一个信号怎么通过多个管脚输出?2017-04-05 7743
-
直流电机扭矩控制2017-03-06 2760
-
CC2564与多个手机可以同时连接,却不能通过多个手机软件连接?2016-04-05 3856
-
数字舵机扭矩消失时,该怎么操作2013-01-28 2013
-
通过多个数据文件组合优化INL/DNL分析2006-05-07 1804
全部0条评论

快来发表一下你的评论吧 !
