

如何列写控制系统微分方程
描述
如何列写控制系统微分方程:
列写控制系统微分方程注意事项:1,由系统原理图画出系统方块图,并列写系统各元件的微分方程。2,信号传递单向性,前一个元件输出是后一个元件的输入;3,后级元件不对前级元件产生负载效应。4,消去中间变量得到描述系统输出量与输入量之间关系的微分方程;
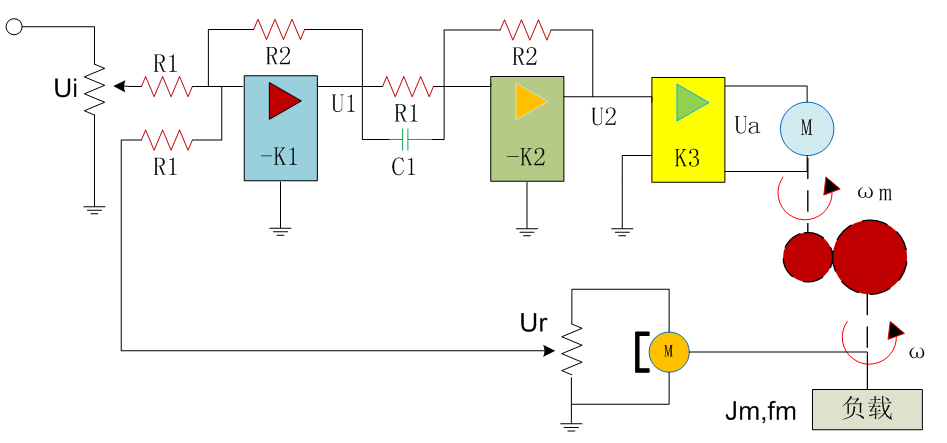
控制系统被控对象是电动机通过齿轮带动负载,系统输出量是转速ω,参据量是Ui,控制系统由给定电位器、运算放大器1、运算放大器2、功率放大器3、齿轮减速器、测速发电机等部分组成。首先分别列写各元器件微分方程:
运算放大器1:参据量Ui与速度反馈电压Ut经过放大后产生偏差放大信号输出。

运算放大器2:带有RC网络的放大电路,U2与U1之间的微分方程为:

式中,K2=R2/R1是运算放大器2的比例系数,τ=R1C是微分时间常数。因此,这是一个比例微分控制元件;
运算放大器3:功率放大器,输入输出方程为:

直流电动机:
首先把已知的齿轮系等效转动惯量、粘性摩擦系数和等效负载转矩带入齿轮系动态微分方程:

列写输出转矩等效微分方程:

然后结合直流电机电压方程、电磁转矩方程列写直流电机微分方程为:

齿轮系:设齿轮系的输入与输出角速度比为i,则电动机转速ωm经齿轮系减速后变为ω:

测速发电机:测速发电机输出电压Ut与其转速ω成正比:

消去方程中间变量Ut、U1、U2、Ua,ωm,整理后获得控制系统微分方程:

该式用于研究给定电压Ui和扰动转矩Mc作用于系统时,速度控制系统的动态性能。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
微分方程经典求解法2009-09-10 4439
-
Matlab偏微分方程工具箱应用说明2009-09-22 6006
-
Matlab求解微分方程(ODEs/PDEs)2011-07-08 8594
-
使用传递函数代替常系数微分方程2019-05-21 3237
-
用微分方程来描述自动控制系统各变量的动态关系2021-09-15 1575
-
如何列写控制系统微分方程? 列写控制系统微分方程注意事项有哪些?2021-10-25 1881
-
【全美经典】微分方程 第二版2008-08-08 817
-
常微分方程的MAtLAB解法2009-01-08 703
-
含一般时延的高阶泛函微分方程的周期解2009-02-28 731
-
常微分方程复习,常微分方程pdf2009-04-23 1045
-
导热微分方程式视频教程2009-07-05 823
-
微分方程式的建立与求解2009-09-30 2391
-
一类高阶非线性微分方程的解法2010-03-03 1084
-
Matlab的微分、积分和微分方程2008-10-17 5001
-
系统微分方程的解—系统的全响应2009-07-09 5343
全部0条评论

快来发表一下你的评论吧 !
