

简述1500如何通过脉冲控制步进电机
电子说
描述
前面学习了1200高速脉冲输出功能的应用,那1500如何输出高速脉冲控制步进电机呢?
1500要输出高速脉冲可以选择高速脉冲输出模块TM PTO4。
一、新建1500项目,组态好TM PTO4模块,模块属性设置如下图所示:
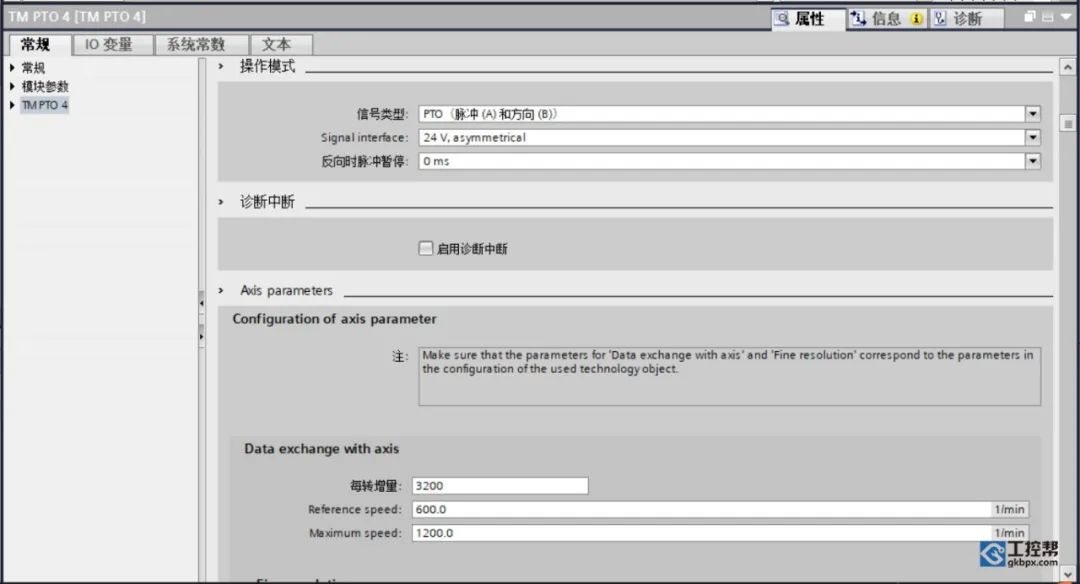
每转增量:步进电机转一圈需要的脉冲数,即细分。
Reference speed:参考转速,后续设置的速度以该速度的百分比表示,范围-200%至200%。
Maximum speed:最大转速,不得超过参考转速的2倍。
二、新增定位轴工艺对象。
在项目树中找到工艺对象>新增对象,如下图。
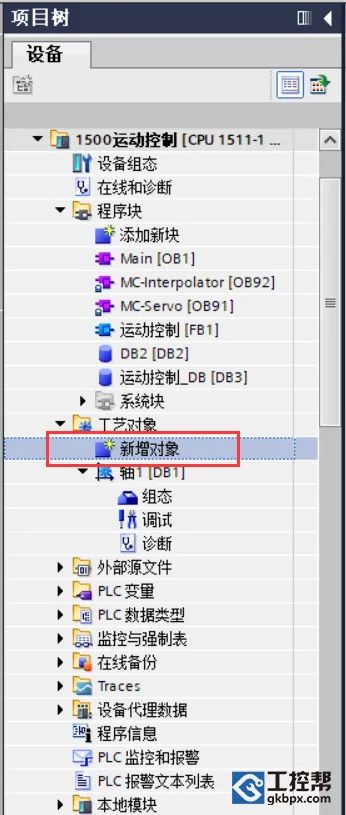
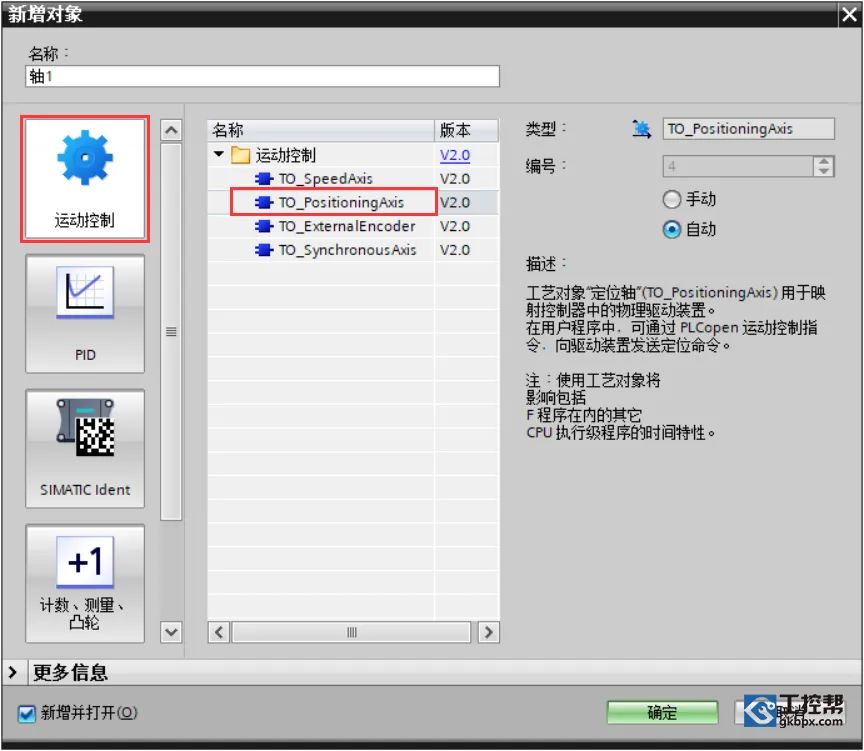
打开新增对象选择对话框,点击>运动控制>TO_PositioningAxis>确定。
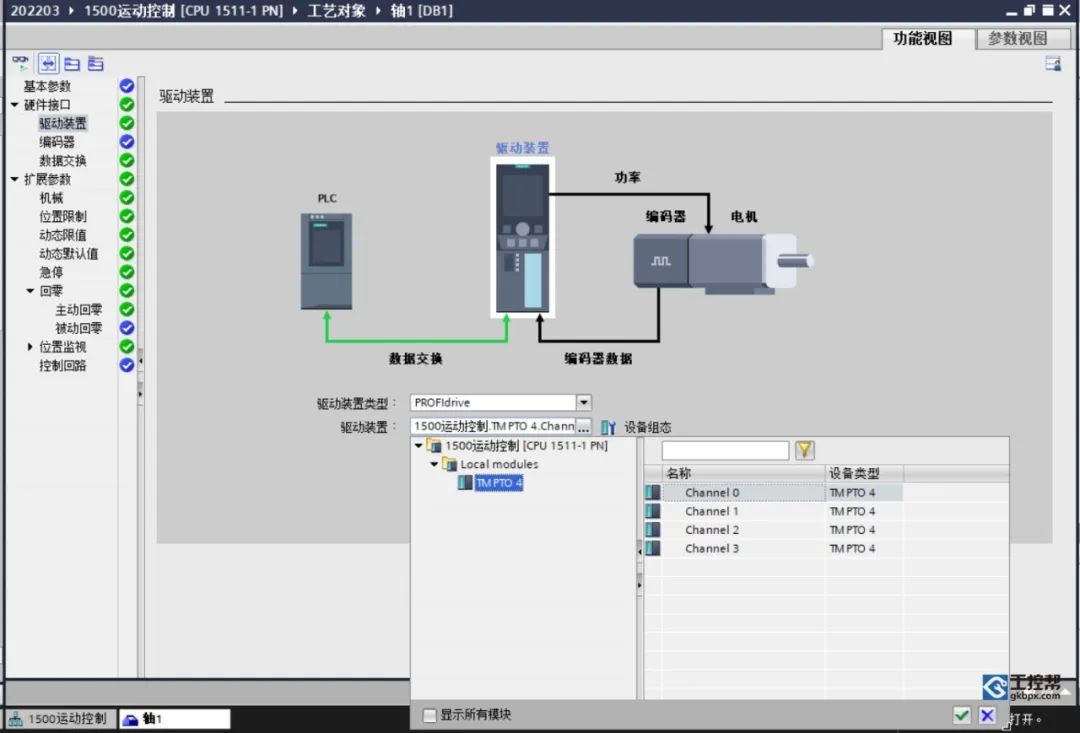
工艺对象组态步骤如下:
驱动装置:驱动装置设置为PROFIdrive,选择组态的TM PTO4模块的channel0通道。
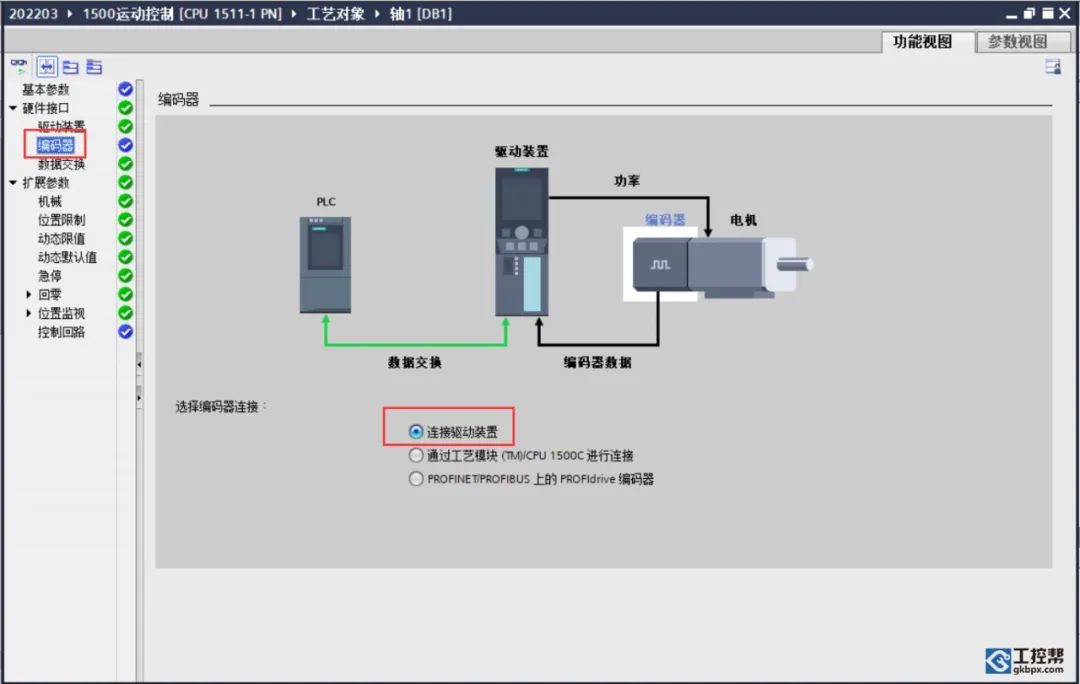
编码器:步进没有编码器,伺服电机的编码器也是反馈给驱动器,所以选择“连接驱动装置”。
数据交换:驱动装置报文默认选报文3,参考转数和最大转数尽量与模块属性设置一样,编码器报文也选报文3,增量式编码器,每转增量设置成步进细分。高精度设置成0位(实为2的0次方)。如果需要将电机方向反过来,则需要将驱动装置和编码器方向同时反向。

设置好负载齿轮的传动比,丝杆导程参数。

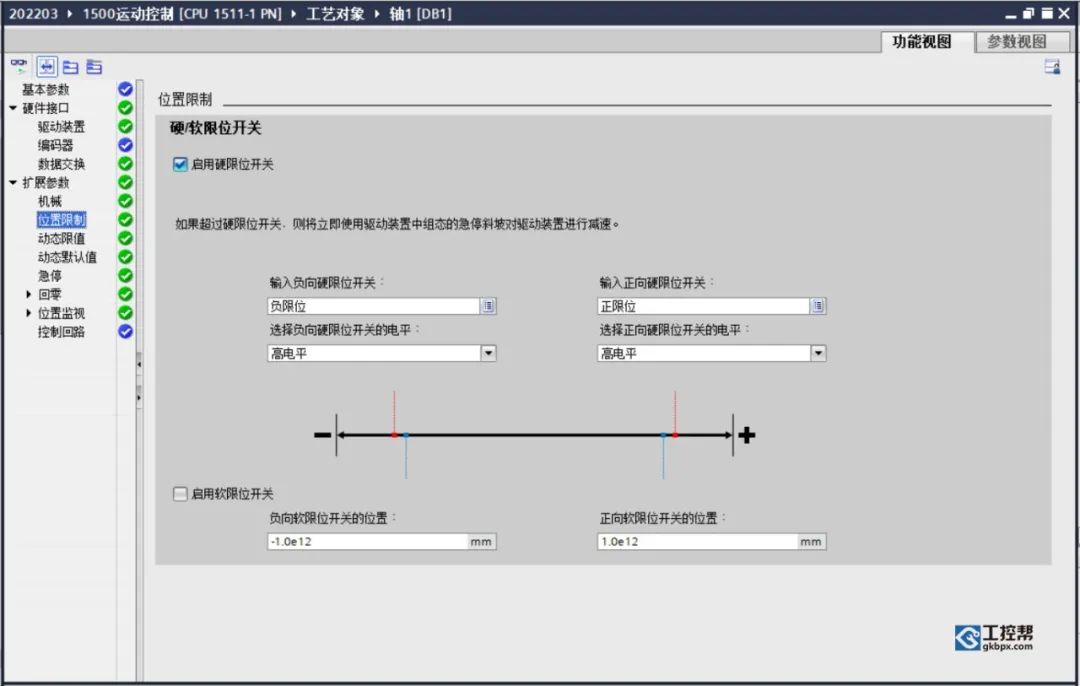
启用硬限位和软限位并设置好对应的信号输入及高低电平,注意信号应先定义符号才可使用。
设置最大速度,加速时间和减速时间,自动换算出最大加速度和最大减速度,滤波时间即加加速度时间。



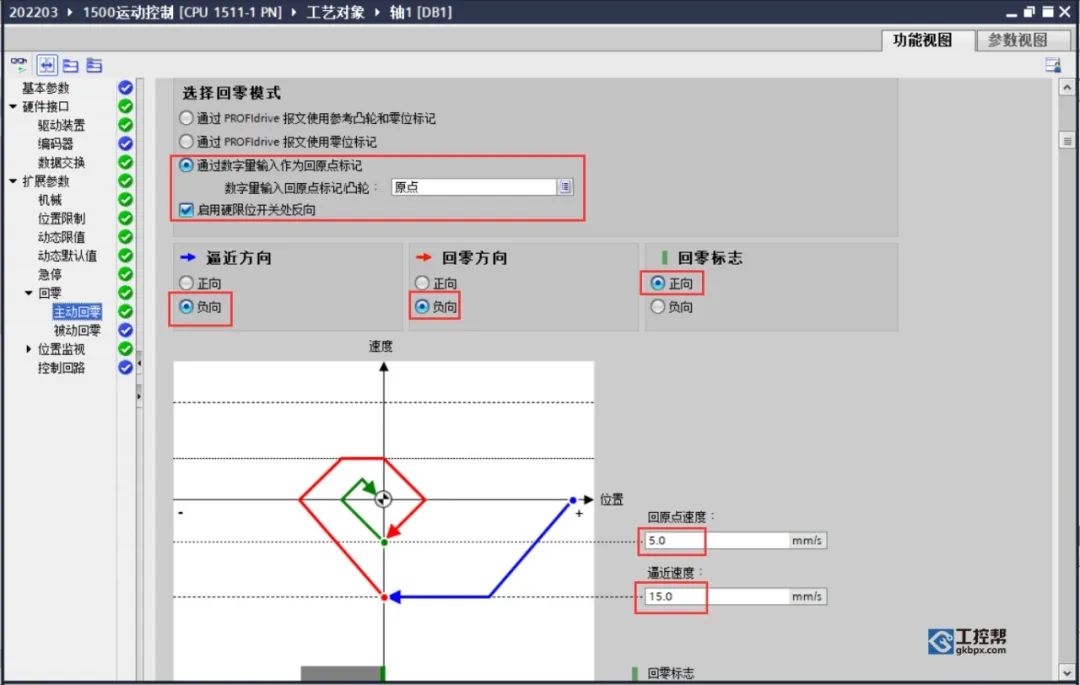
设置主动回原点中原点输入方式,原点信号,逼近方向,回零方向,回零标志,回原点速度,回零速度,启用硬限位开关处反向。
步进没有编码器反馈,去掉启用跟随误差监控,否则容易报故障。

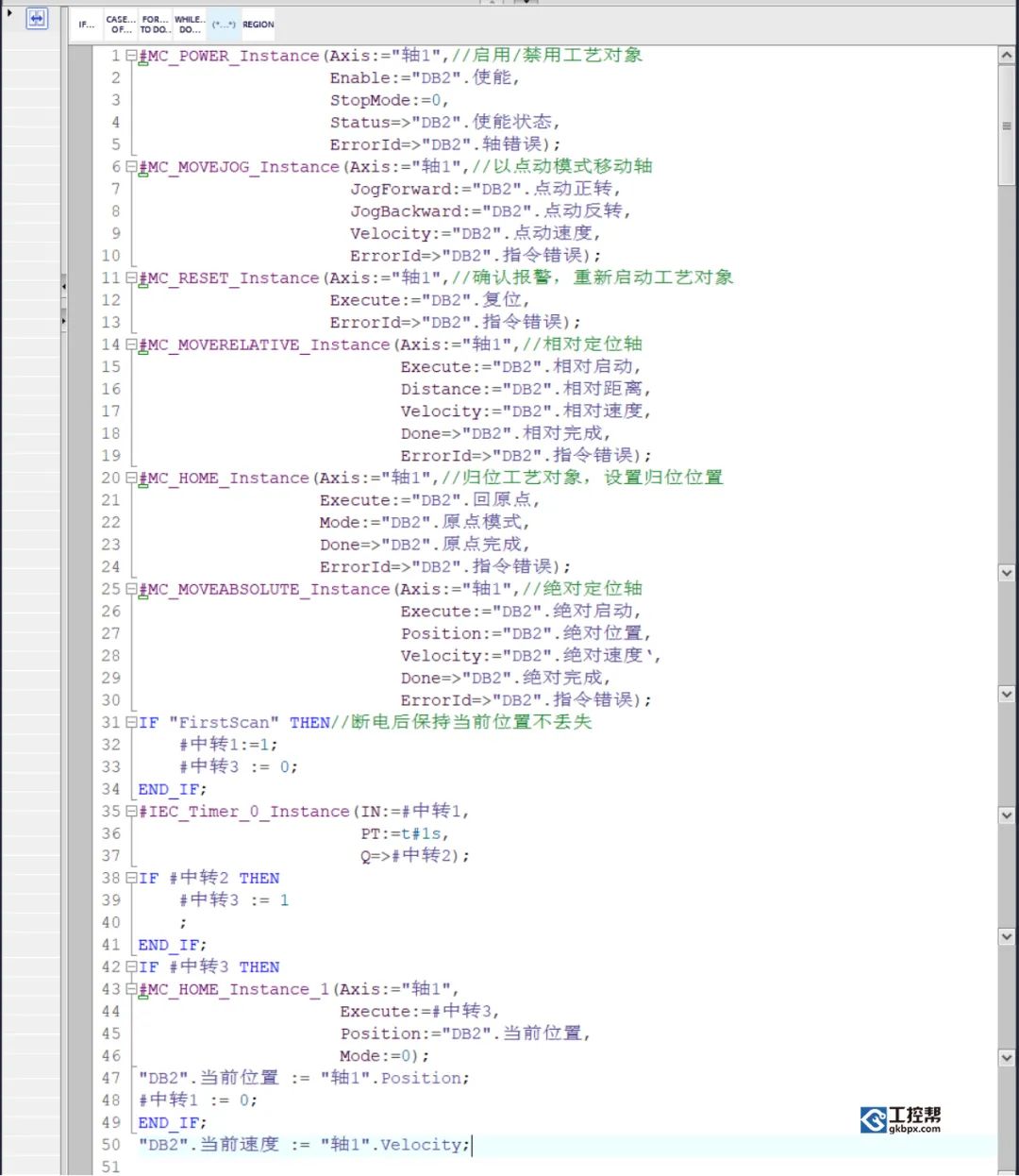
三、编写程序。
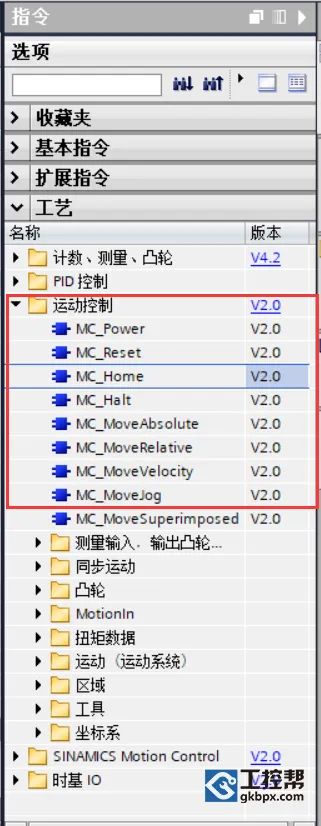
编写程序方法与1200几乎相同,在指令列表中找到工艺>运动控制。此处用SCL语言进行编写,程序如下图所示。
好了,到这来你已经学会了1500高速脉冲输出程序编写方法,赶紧试试吧。
-
行星减速步进电机与步进电机的区别2024-11-16 1970
-
步进电机的控制技术及发展概况有哪些?2024-10-22 1560
-
步进电机控制器电路图 步进电机控制器的分类及其特点2024-06-24 7233
-
STM32可以通过控制脉冲控制步进电机达到所需的固定转速吗?2024-04-29 520
-
步进电机控制方法 步进电机和伺服电机的区别2024-01-22 2534
-
通过PLC实现步进电机定位控制的方法2023-03-23 728
-
51控制步进电机2023-03-21 810
-
步进电机与步进驱动器控制原理简述2023-03-17 1011
-
怎样控制步进电机快慢_步进电机不用脉冲如何驱动2023-03-08 6927
-
步进电机控制系统的设计及应用案例2018-02-11 15676
-
步进电机总线控制与脉冲控制的区别,一文给你详细解读!2017-12-14 38451
-
海为PLC一路脉冲控制两台步进电机应用2017-10-09 1394
-
脉冲控制步进电机2012-09-05 4261
全部0条评论

快来发表一下你的评论吧 !
