

关于三菱FX5UPLC的原点回归问题
工业控制
描述
在PLC控制定位系统中,通常会用到相对定位、绝对定位、表格定位、原点回归等功能,针对FX5U PLC可以使用正转极限、反转极限,利用DOG搜索功能进行原点回归。此时,因原点回归的开始位置不同,原点回归动作也各不同。那么今天我们就原点回归这个问题展开探讨。 由图1可以看出数字量输入信号有4个,分别是:正转极限、反转极限、近点信号、原点信号、,这四个信号可以接入PLC中的X3、X2、X1、X0端子。原点回归的速度和方向都可以通过程序进行设置。
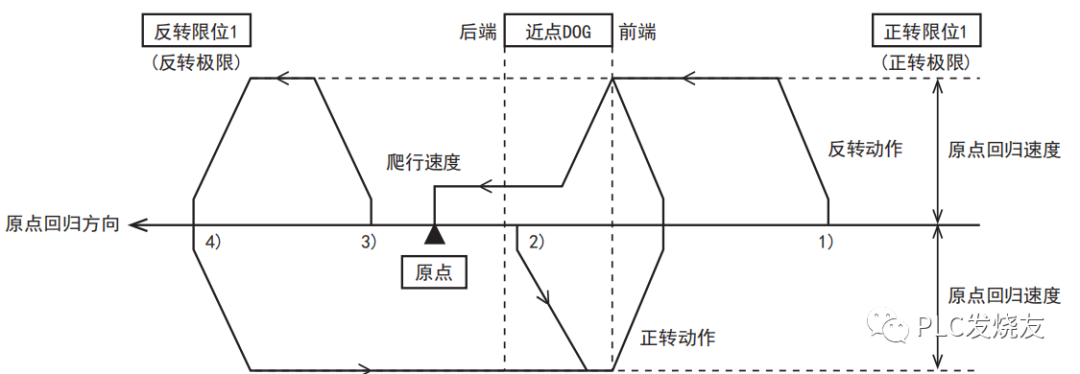
图1
针对原点回归开始位置不同,原点回归分为以下4种情况:
01 开始位置在通过近点DOG前的时候:
1. 通过执行DSZR/DDSZR指令,开始原点回归动作。
2. 以原点回归速度,向原点回归方向开始移动。
3. 一旦检测出近点DOG的前端,就开始减速到爬行速度。
4. 检测出近点DOG的后端后,在检测出指定次数的零点信号时停止。
02 开始位置在近点DOG里面的时候:
1. 通过执行DSZR/DDSZR指令,开始原点回归动作
2. 以原点回归速度,向与原点回归方向相反的方向开始移动。
3. 一旦检测出近点DOG的前端,就进行减速停止。(离开近点DOG。)
4. 以原点回归速度,向原点回归方向开始移动。(再次进入近点DOG。)
5. 一旦检测出近点DOG的前端,就开始减速到爬行速度。
6. 检测出近点DOG的后端后,在检测出指定次数的零点信号时停止。
03 开始位置在通过近点DOG后的时候:
1. 通过执行DSZR/DDSZR指令,开始原点回归动作。
2. 以原点回归速度,向原点回归方向开始移动。
3. 检测出反转限位1(反转极限)时减速停止。
4. 以原点回归速度,向与原点回归方向相反的方向开始移动。
5. 一旦检测出近点DOG的前端,就进行减速停止。(检测出(离开)近点DOG。)
6. 以原点回归速度,向原点回归方向开始移动。(再次进入近点DOG。)
7. 一旦检测出近点DOG的前端,就开始减速到爬行速度。
8. 检测出近点DOG的后端后,在检测出指定次数的零点信号时停止。
04 开始位置的原点回归方向的限位开关(反转限位1)为ON的时候:
1. 通过执行DSZR/DDSZR指令,开始原点回归动作。
2. 以原点回归速度,向与原点回归方向相反的方向开始移动。
3. 一旦检测出近点DOG的前端,就进行减速停止。(检测出(离开)近点DOG。)
4. 以原点回归速度,向原点回归方向开始移动。(再次进入近点DOG。)
5. 一旦检测出近点DOG的前端,就开始减速到爬行速度。
6. 检测出近点DOG的后端后,在检测出指定次数的零点信号时停止。
注意:将近点DOG信号和零点信号指定为同一软元件,当原点回归零点信号数为1时,原点回归结束时的停止方法不是
检测出零点信号,而是检测出近点DOG信号。此外,关于零点信号计数开始时间的设定,在近点DOG前端时,设定为从检测出近点DOG信号时开始对零点信号进行计数。
程序举例分3步:(1.原点回归动作描述 2.软件中参数设置 3.编写程序)
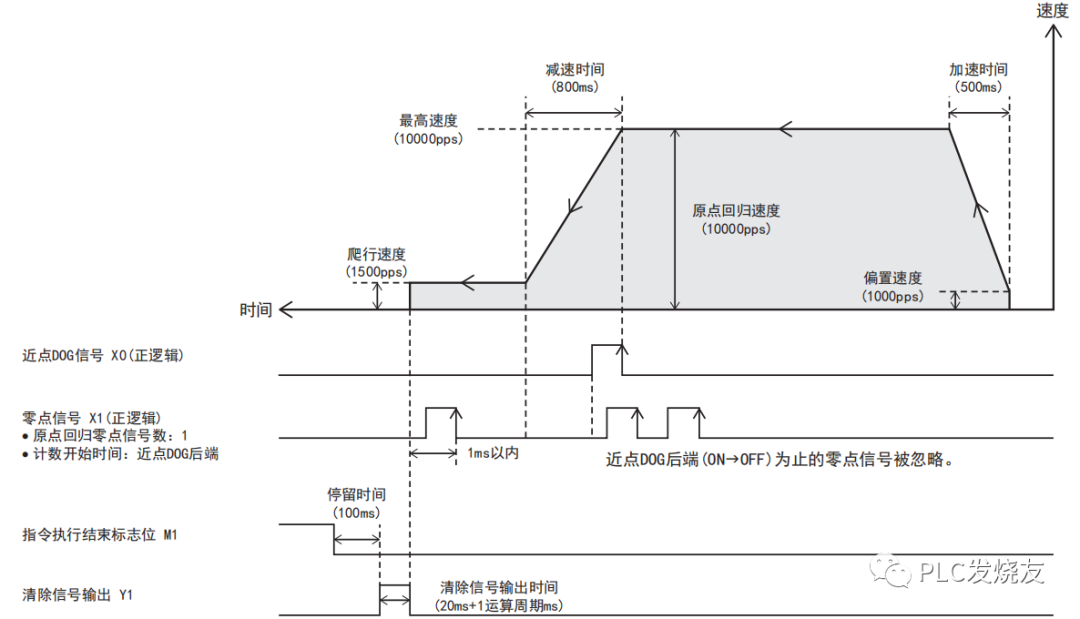
原点回归动作
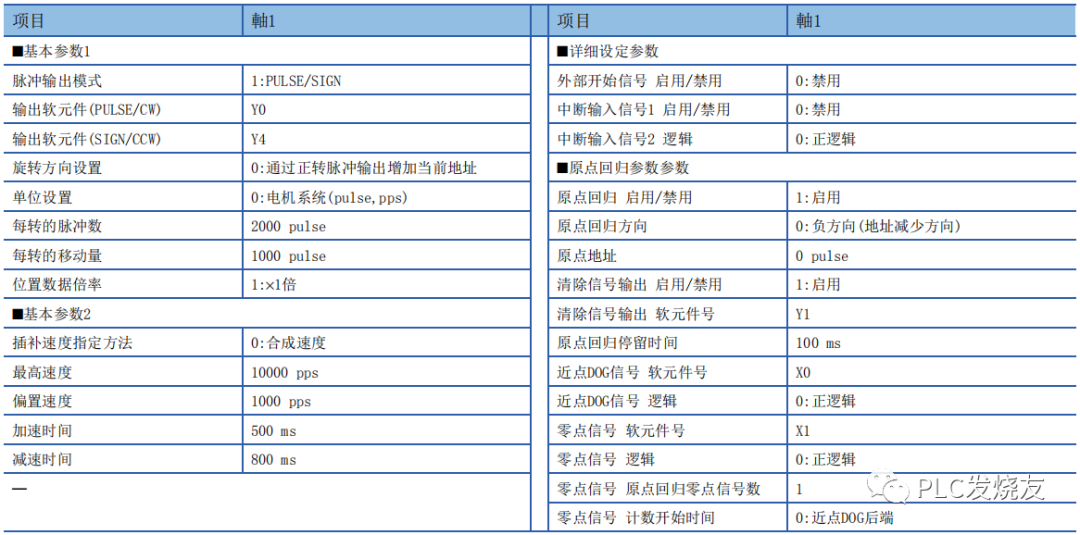
软件中参数设置
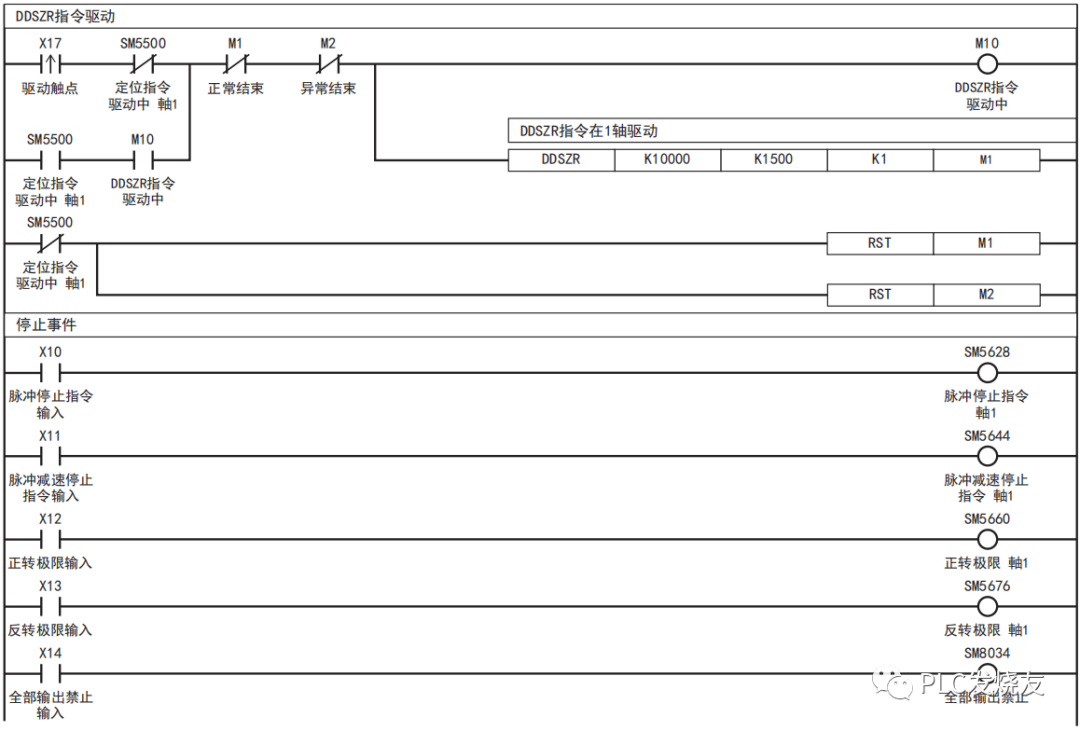
程序编写
结束语:关于三菱FX5UPLC中利用DOG搜索功能进行原点回归的问题就和大家探讨到这里了。在实际定位回参考点的时候一定要分析不同的情况才能让设备更加准确的回到原点。
编辑:黄飞
-
谁有LABVIEW与三菱FX3UPLC Modbus通讯的程序的?2017-01-03 8423
-
Labview与FX5UCModbus通讯程序2020-07-03 9507
-
三菱FX系列是如何控制步进电机回原点的?2021-07-08 3157
-
常年高价回收三菱FX2N系列,回收三菱FX1S系列回收三菱Q系列2021-10-16 957
-
三菱plc应用指令2008-11-21 3163
-
三菱FX三菱PLC完整培训2016-03-22 1749
-
三菱FX系列PLC指针2017-02-15 1768
-
PanelMaster与三菱FX485DB卡通讯2017-10-11 1647
-
三菱FX系列PLC入门教程免费下载2018-06-27 2521
-
三菱FX—3U的PLC与松下A5的伺服驱动器2023-01-08 7476
-
三菱FX系列PLC与三菱变频器通讯应用实例2022-02-14 7495
-
三分钟实现MQTT协议网关串口连接三菱FX3UPLC上传腾讯云2023-10-23 2339
-
MQTT协议网关串口连接三菱FX3UPLC操作说明-阿里云2023-03-06 991
-
三菱FX5UPLC怎样远程监控和故障报警?2023-12-01 2424
-
三菱FX3U/5U PLC无线MODBUS通信方案2024-10-22 3666
全部0条评论

快来发表一下你的评论吧 !
