

PID控制原理详解
工业控制
描述
PID即:Proportional(比例)、Integral(积分)、Differential(微分)的缩写,PID控制算法是结合比例、积分和微分三种环节于一体的控制算法,它是连续系统中技术最为成熟、应用最为广泛的一种控制算法,该控制算法出现于20世纪30至40年代,适用于对被控对象模型了解不清楚的场合。实际运行的经验和理论的分析都表明,运用这种控制规律对许多工业过程进行控制时,都能得到比较满意的效果。PID控制的实质就是根据输入的偏差值,按照比例、积分、微分的函数关系进行运算,运算结果用以控制输出。
在实际控制系统中,通过P、I、D三个环节的不同组合,即可得到常用的各种调节规律,PID具有原理简单、鲁棒性强、适应性广等优点,即使在新型控制算法与控制规律不断产生的今天,PID作为最基本的控制方式仍占据重要的地位,显示出强大的生命力。
PID控制是一种经典的反馈控制算法,可以根据实际输出值与预期输出值之间的误差信号,及时调整控制输出值,从而实现对控制精度的提高。PID控制的主要原理包括比例控制、积分控制和微分控制。
比例控制(P控制)
比例控制是根据实际输出值与预期输出值之间的误差信号,按比例调整控制输出值,以实现对控制精度的提高。比例控制的输出量与误差成正比,即输出量P=Kp*ΔE,其中Kp是比例系数,ΔE为误差信号。
比例控制具有快速响应、控制精度高等优点,但是容易出现静态误差和振荡等问题。
积分控制(I控制)
积分控制是根据误差信号的积分值来调整控制输出量,以消除静态误差和提高稳态精度。积分控制的输出量与误差信号的积分值成正比,即输出量I=Ki*∫ΔEdt,其中Ki为积分系数。
积分控制能够消除静态误差,但是容易引起系统的超调和振荡等问题。
微分控制(D控制)
微分控制是根据误差信号的变化率来调整控制输出量,以提高控制系统的稳定性。微分控制的输出量与误差信号的变化率成正比,即输出量D=Kd*d(ΔE)/dt,其中Kd为微分系数。
微分控制能够提高系统的稳定性,但是容易引起系统的抖动和噪声等问题。
PID控制
PID控制将比例控制、积分控制和微分控制三种控制方式结合起来,以实现更为精确的控制。PID控制器的输出量为PID=KpΔE+Ki∫ΔEdt+Kd*d(ΔE)/dt,其中Kp、Ki和Kd分别为比例系数、积分系数和微分系数。
PID控制具有快速响应、控制精度高和稳态误差小等优点,是一种广泛应用于控制系统中的控制算法。但是,PID控制也存在一些问题,例如调节困难、参数选择不当容易引起系统的不稳定等问题。因此,在实际应用中,需要根据具体控
PID算法的执行流程是非常简单的,即利用反馈来检测偏差信号,并通过偏差信号来控制被控量。而控制器本身就是比例、积分、微分三个环节的加和。其功能框图如下:
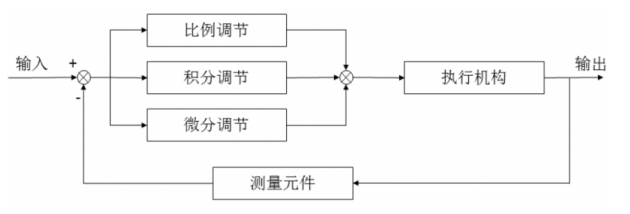
考虑在某个特定的时刻t,此时输入量为rin(t),输出量为rout(t),于是偏差就可计算为err(t)=rin(t)-rout(t)。于是PID的基本控制规律就可以表示为如下公式:


其中Kp为比例带,TI为积分时间,TD为微分时间。PID控制的基本原理就是如此。
-
PID控制详解2016-01-20 22171
-
算法篇(PID详解)2020-05-19 4257
-
PID控制详解,硬件实现PID和软件实现PID控制的讲解2021-01-25 9139
-
专家PID控制和模糊PID控制2010-05-04 1854
-
PID控制原理详解2012-01-16 3815
-
pid算法_pid控制原理2012-09-09 197920
-
PID算法详解2016-12-17 1218
-
PID理论详解2017-11-16 8647
-
一文详解PID控制2018-10-05 10343
-
PID控制算法的详解和PID代码免费下载2019-10-22 1408
-
PID控制算法详解2022-08-22 15979
-
详解什么是PID2022-09-22 7490
-
PID控制算法详解(二)2023-03-16 3402
-
详解PID回路控制方案2023-12-31 3414
-
PID控制详解(可下载)2025-02-27 2905
全部0条评论

快来发表一下你的评论吧 !
