

 【YOLOv5】LabVIEW+YOLOv5快速实现实时物体识别(Object Detection)含源码
【YOLOv5】LabVIEW+YOLOv5快速实现实时物体识别(Object Detection)含源码
描述
前言
前面我们给大家介绍了基于LabVIEW+YOLOv3/YOLOv4的物体识别(对象检测),今天接着上次的内容再来看看YOLOv5。本次主要是和大家分享使用LabVIEW快速实现yolov5的物体识别, 本博客中使用的智能工具包可到主页置顶博客LabVIEW AI视觉工具包(非NI Vision)下载与安装教程中下载 。若配置运行过程中遇到困难,欢迎大家评论区留言,博主将尽力解决。
一、关于YOLOv5
YOLOv5是在 COCO 数据集上预训练的一系列对象检测架构和模型。表现要优于谷歌开源的目标检测框架 EfficientDet,在检测精度和速度上相比yolov4都有较大的提高。目前YOLOv5官方代码中,最新版本是YOLOv5 v6.1,一共给出了5个版本的模型,分别是 YOLOv5n、YOLOv5s、YOLOv5m、YOLOv5l、YOLO5x 五个模型(如下图所示)。这些不同的变体模型使得YOLOv5能很好的在精度和速度中权衡,方便用户选择。其中五个模型性能依次增强。比如YOLOv5n模型参数量最小,速度最快,AP精度最低;YOLOv5x模型参数量最大,速度最慢,AP精度最高。本博客,我们以YOLOv5最新版本来介绍相关的部署开发。
YOLOv5相比于前面yolo模型的主要特点是:
1、小目标的检测精度上有明显的提高;
2、能自适应锚框计算
3、具有数据增强功能,随机缩放,裁剪,拼接等功能
4、灵活性极高、速度超快,模型超小、在模型的快速部署上具有极强优势
关于YOLOv5的网络结构解释网上有很多,这里就不再赘述了,大家可以看其他大神对于YOLOv5网络结构的解析。
二、YOLOv5模型的获取
为方便使用, 博主已经将yolov5模型转化为onnx格式 ,可在百度网盘下载**链接:https://pan.baidu.com/s/15dwoBM4W-5_nlRj4G9EhRg?pwd=yiku
提取码:yiku
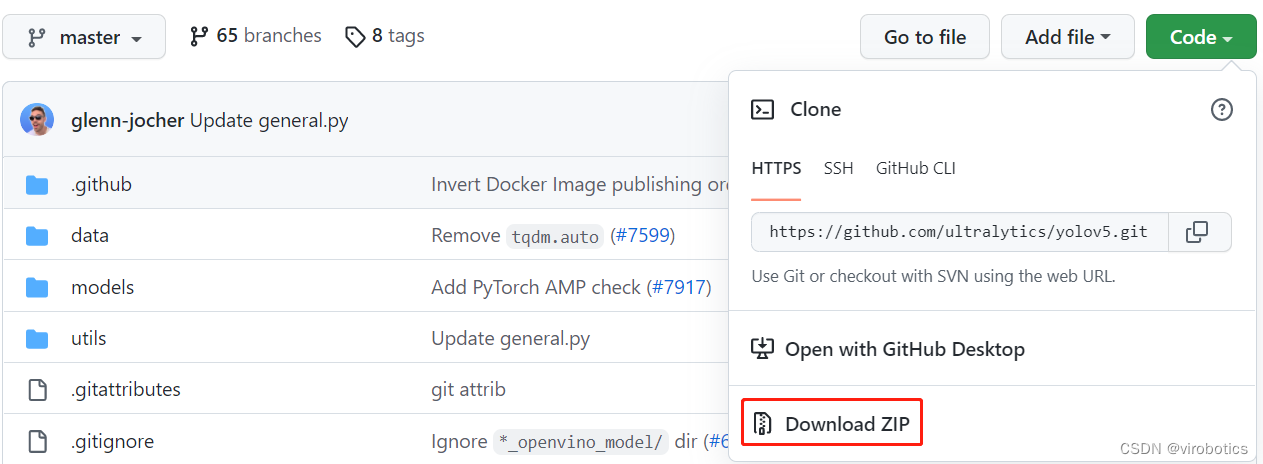
1.下载源码
将Ultralytics开源的YOLOv5代码Clone或下载到本地,可以直接点击Download ZIP进行下载,
下载地址:https://github.com/ultralytics/yolov5
2.安装模块
解压刚刚下载的zip文件,然后安装yolov5需要的模块,记住cmd的工作路径要在yolov5文件夹下:
打开cmd切换路径到yolov5文件夹下,并输入如下指令,安装yolov5需要的模块
pip install -r requirements.txt
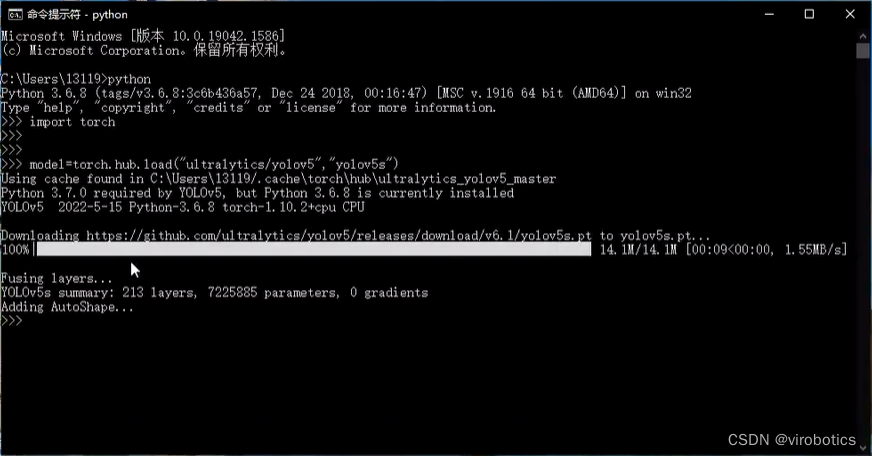
3.下载预训练模型
打开cmd,进入python环境,使用如下指令下载预训练模型:
import torch
# Model
model = torch.hub.load('ultralytics/yolov5', 'yolov5s') # or yolov5n - yolov5x6, custom
成功下载后如下图所示:
4.转换为onnx模型
在yolov5之前的yolov3和yolov4的官方代码都是基于darknet框架实现的,因此opencv的dnn模块做目标检测时,读取的是.cfg和.weight文件,非常方便。但是yolov5的官方代码是基于pytorch框架实现的。需要先把pytorch的训练模型.pt文件转换到.onnx文件,然后才能载入到opencv的dnn模块里。
将.pt文件转化为.onnx文件,主要是参考了nihate大佬的博客:https://blog.csdn.net/nihate/article/details/112731327
将export.py做如下修改,将def export_onnx()中的第二个try注释掉,即如下部分注释:
'''
try:
check_requirements(('onnx',))
import onnx
LOGGER.info(f'
{prefix} starting export with onnx {onnx.__version__}...')
f = file.with_suffix('.onnx')
print(f)
torch.onnx.export(
model,
im,
f,
verbose=False,
opset_version=opset,
training=torch.onnx.TrainingMode.TRAINING if train else torch.onnx.TrainingMode.EVAL,
do_constant_folding=not train,
input_names=['images'],
output_names=['output'],
dynamic_axes={
'images': {
0: 'batch',
2: 'height',
3: 'width'}, # shape(1,3,640,640)
'output': {
0: 'batch',
1: 'anchors'} # shape(1,25200,85)
} if dynamic else None)
# Checks
model_onnx = onnx.load(f) # load onnx model
onnx.checker.check_model(model_onnx) # check onnx model
# Metadata
d = {'stride': int(max(model.stride)), 'names': model.names}
for k, v in d.items():
meta = model_onnx.metadata_props.add()
meta.key, meta.value = k, str(v)
onnx.save(model_onnx, f)'''
并新增一个函数def my_export_onnx():
def my_export_onnx(model, im, file, opset, train, dynamic, simplify, prefix=colorstr('ONNX:')):
print('anchors:', model.yaml['anchors'])
wtxt = open('class.names', 'w')
for name in model.names:
wtxt.write(name+'
')
wtxt.close()
# YOLOv5 ONNX export
print(im.shape)
if not dynamic:
f = os.path.splitext(file)[0] + '.onnx'
torch.onnx.export(model, im, f, verbose=False, opset_version=12, input_names=['images'], output_names=['output'])
else:
f = os.path.splitext(file)[0] + '_dynamic.onnx'
torch.onnx.export(model, im, f, verbose=False, opset_version=12, input_names=['images'],
output_names=['output'], dynamic_axes={'images': {0: 'batch', 2: 'height', 3: 'width'}, # shape(1,3,640,640)
'output': {0: 'batch', 1: 'anchors'} # shape(1,25200,85)
})
return f
在cmd中输入转onnx的命令(记得将export.py和pt模型放在同一路径下):
python export.py --weights yolov5s.pt --include onnx
如下图所示为转化成功界面
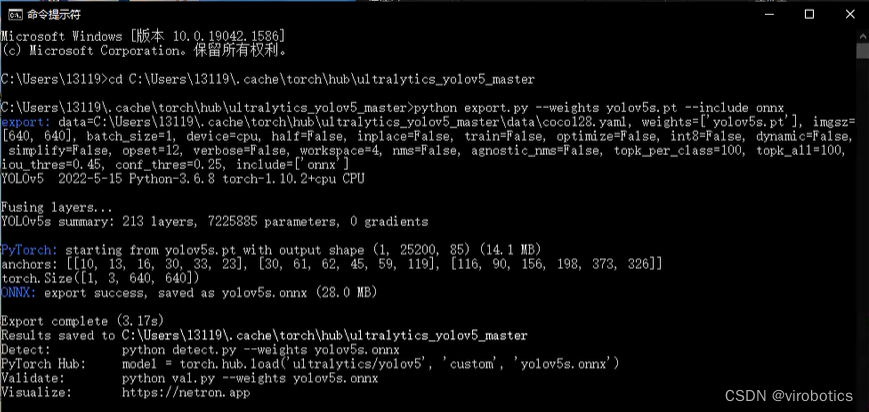
其中yolov5s可替换为yolov5myolov5myolov5lyolov5x

三、LabVIEW调用YOLOv5模型实现实时物体识别(yolov5_new_opencv.vi)
本例中使用LabvVIEW工具包中opencv的dnn模块readNetFromONNX()载入onnx模型,可选择使用cuda进行推理加速。
1.查看模型
我们可以使用netron 查看yolov5m.onnx的网络结构,浏览器中输入链接: https://netron.app/,点击Open Model,打开相应的网络模型文件即可。**
**
如下图所示是转换之后的yolov5m.onnx的属性:
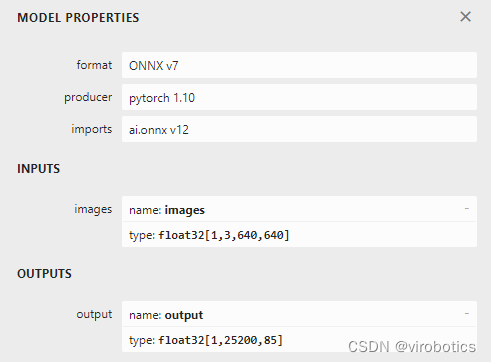
2.参数及输出
blobFromImage参数:
size:640*640
Scale=1/255
Means=[0,0,0]
Net.forward()输出:
**单数组 25200*85 **
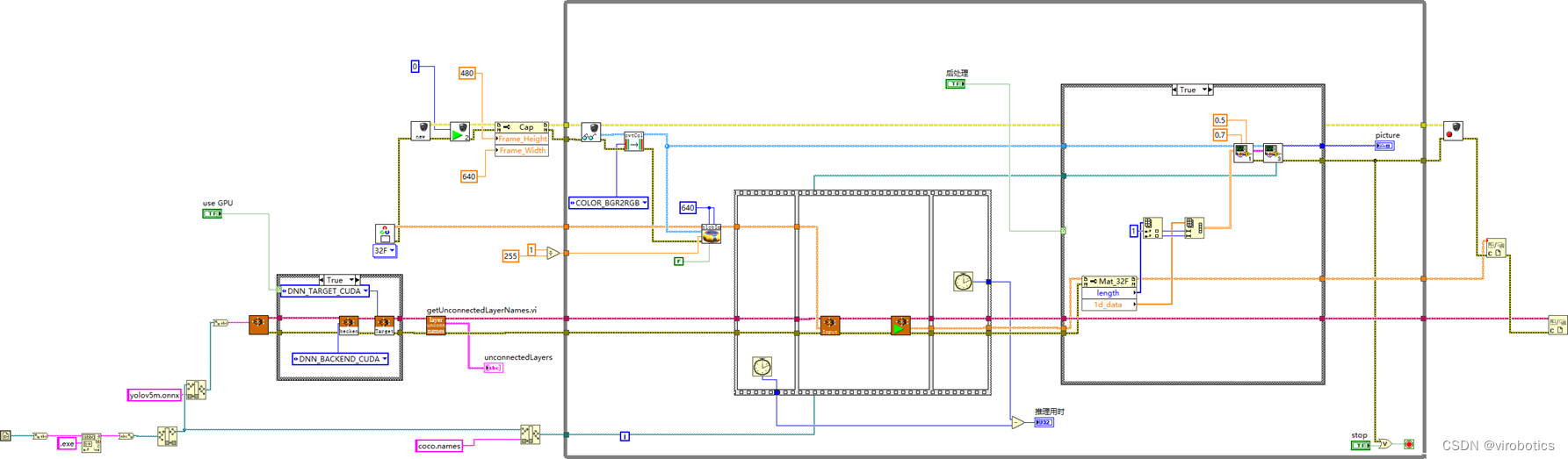
3.LabVIEW调用YOLOv5源码
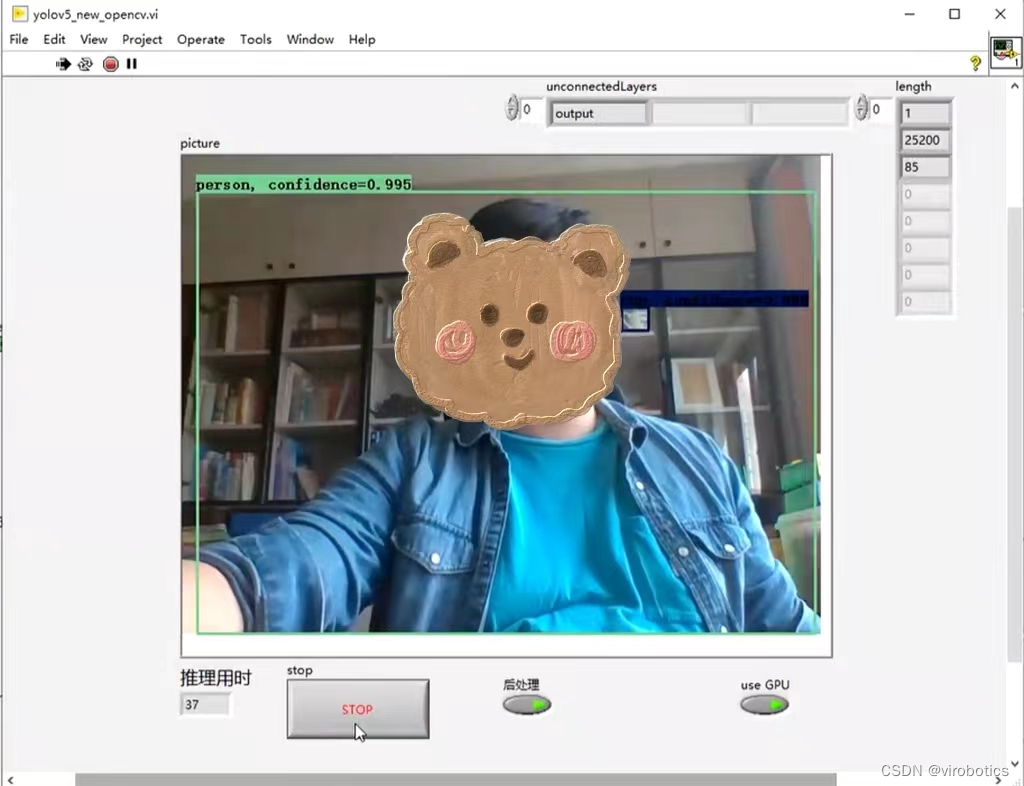
如下图所示,调用摄像头实现实时物体识别
4.LabVIEW调用YOLOv5实时物体识别结果
本次我们是以yolov5m.onnx为例来测试识别结果和速度的;
**不使用GPU加速,仅在CPU模式下,实时检测推理用时在300ms/frame左右
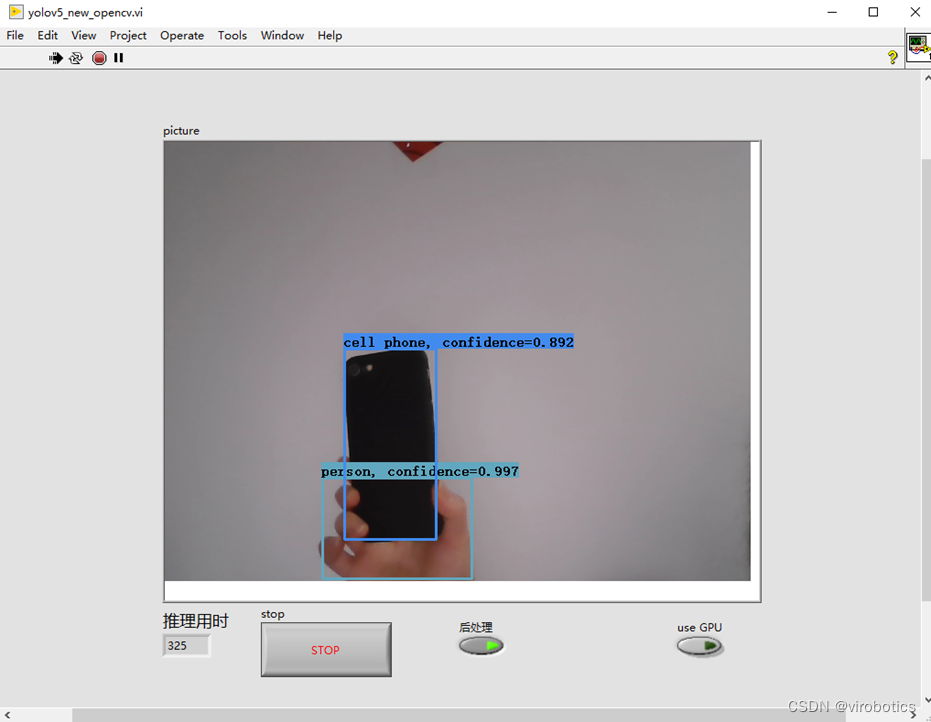
使用GPU加速,实时检测推理用时为****30~40ms/frame ,是cpu速度的十倍多**
如需源码,请关注微信公众号:VIRobotics。回复关键字“yolov5”。
**
审核编辑 黄宇
以上就是今天要给大家分享的内容,本次分享内容实验环境说明:操作系统为Windows10,python版本为3.6及以上,LabVIEW为2018及以上 64位版本,视觉工具包为博客开头提到的工具包。
如果文章对你有帮助,欢迎关注、点赞、收藏
审核编辑 黄宇
-
瑞芯微(EASY EAI)RV1126B yolov5训练部署教程2026-05-09 550
-
基于瑞芯微RK3576的 yolov5训练部署教程2025-09-11 3445
-
yolov5训练部署全链路教程2025-07-25 2203
-
在RK3568教学实验箱上实现基于YOLOV5的算法物体识别案例详解2024-12-03 2240
-
基于YOLOv5的目标检测文档进行的时候出错如何解决?2023-09-18 622
-
yolov5模型onnx转bmodel无法识别出结果如何解决?2023-09-15 822
-
【YOLOv5】LabVIEW+TensorRT的yolov5部署实战(含源码)2023-08-21 2396
-
yolov5和YOLOX正负样本分配策略2023-08-14 4754
-
如何YOLOv5测试代码?2023-05-18 668
-
Yolov5算法解读2023-05-17 14448
-
使用旭日X3派的BPU部署Yolov52023-04-26 2076
-
手把手教你使用LabVIEW ONNX Runtime部署 TensorRT加速,实现YOLOv5实时物体识别2023-03-20 4408
-
怎样使用PyTorch Hub去加载YOLOv5模型2022-07-22 3585
-
龙哥手把手教你学视觉-深度学习YOLOV5篇2021-09-03 8028
全部0条评论

快来发表一下你的评论吧 !
