

CVD 步进电机驱动器说明
电子说
描述
CVD 步进电机驱动器是 PKP 系列高扭矩步进电机的推荐驱动器,因为它能够在整个速度范围内降低振动并提高扭矩性能。最新更新包括增加 RS-485 通信和 MEXE02 软件支持。
工程师应考虑同一制造商生产电机和驱动器的原因之一是制造商对这两种产品的独特了解,可用于提高性能。一个例子是 CVD 驱动器的电流补偿控制。该功能将实际电机绕组数据与独特的驱动算法相结合,以降低振动。

通过先进的微步控制实现最低的振动和噪音
显着提高微步进时的位置精度
双极配置的最高扭矩(4 根引线)
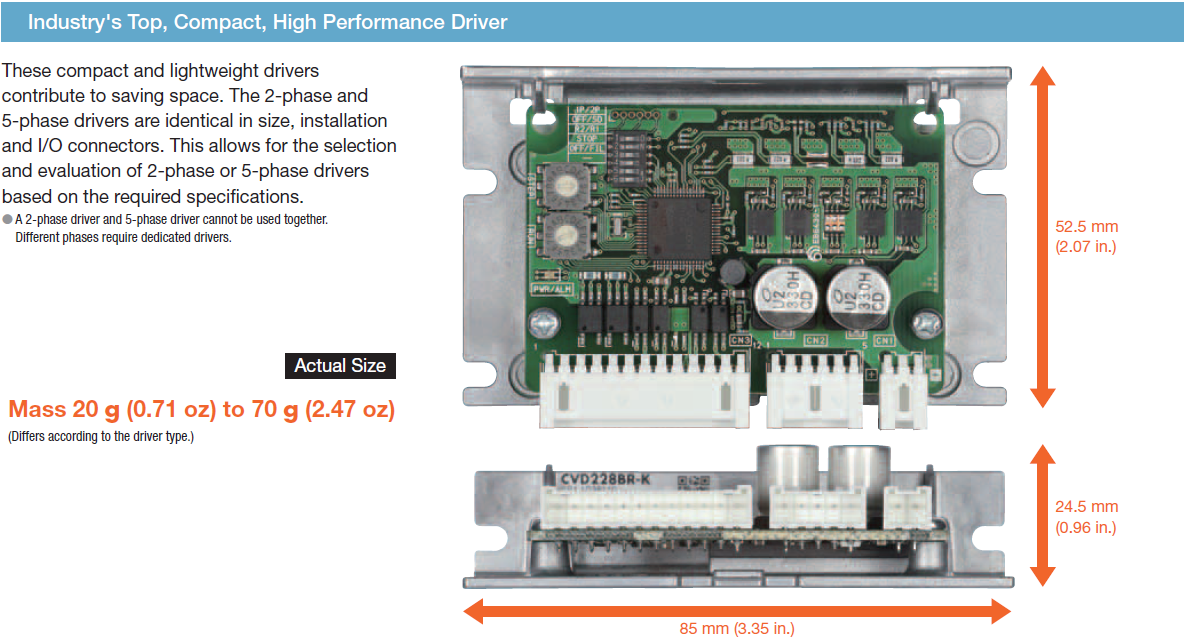
具有节省空间的 FET 的小型、薄型微步进驱动器
24 VDC 输入 / 0.5A 至 4.5A
在第一部分,我将简要解释 CVK 系列的一些独特优势。在第二部分中,我将介绍四种主要类型的 CVD 驱动器以及每种类型提供的产品变体。
| 第一部分:简介 |
CVK 系列最初于 2014 年作为步进电机和双极微步驱动器封装型号推出,其中包括 PKP 系列步进电机和 CVD 驱动器。紧凑型板级 CVD 驱动器专为提高 PKP 系列步进电机的扭矩和精度而设计,同时最大限度地减少不同类型的振动并提高精度。CVD 驱动器还可以与其他 4 引线步进电机配合使用。
最低的振动性能
CVD 驱动器的与众不同之处在于它们提供多种功能以最大限度地减少不同类型的振动。它对振动进行分类的方式是按速度范围。在下面的速度-扭矩曲线中,您可以观察 Y 轴上的振动水平(以电压测量)和 X 轴上的速度范围。黑线表示传统步进电机和驱动器系统(如我们已停产的 CMK 系列或 CSK 系列步进电机和驱动器)的性能。绿线代表 PKP 系列步进电机和 CVD 驱动器的 性能。
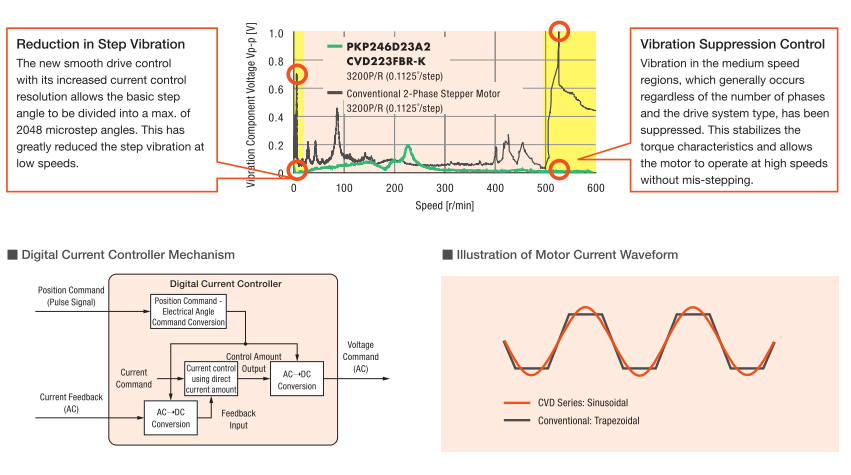
凭借 Oriental Motor 独特的Smooth Drive算法,驱动器在整个速度范围内以每整步 2048 步(2 相 1.8°;5 相 0.72°)自动微步。此功能的好处是控制器脉冲输出分辨率可以保持在整步,而电机以平滑的微步性能运行。这是更新后的 Smooth Drive 功能(以前每整步只有 16 微步)。
Smooth Drive功能可有效减少 50 RPM 或以下时由步进运动引起的振动。 此外,电流相位校正可将共振频率和转矩脉动引起的 50~200 RPM 的振动降至最低。 此外,振动抑制控制可将反电动势引起的 500 RPM 及以上的振动降至最低。
如上图所示,CVD 驱动器还利用全时数字电流控制器来简化电流设置并改进电流波形控制。在过去的驱动器设计中,一个电流检测器用于电机的所有相位。在 CVD 驱动器中,每一相都有自己的电流检测器。这提高了所有电机相位的电流均匀性。通过输出均匀的正弦电流波形(正弦波驱动),与梯形波驱动相比,精度得到提高。
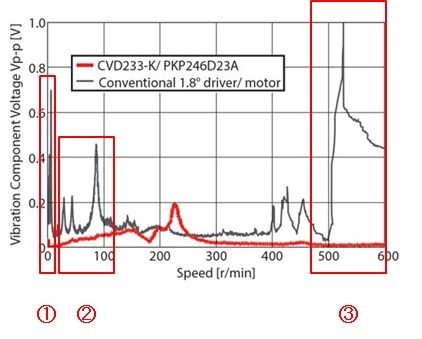
振动特性不变;即使改变了步进角。 这是东方电机独特的电流控制能力的结果。下图显示了步进电机表现出的 3 种类型的共振/振动,以及当所有振动抑制功能都处于活动状态时它们降低了多少。
1. 低速在0~50 RPM之间发生振动(原因:步进运动)
2. 中速振动50~200 RPM(原因:共振和转矩脉动)
3. 500 RPM及以上(原因:反电动势)
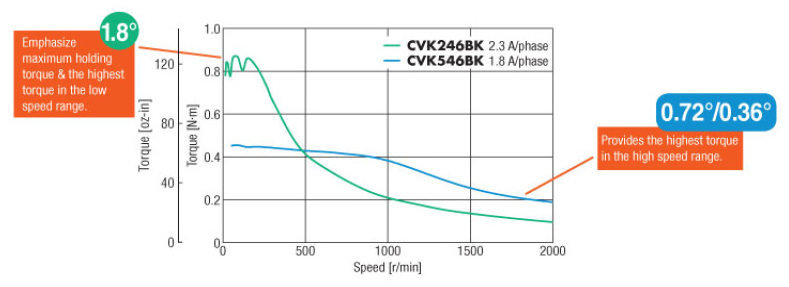
为了获得更高的定位精度,尤其是微步进时,建议使用 5 相 0.72°/0.36° 步进电机。如果需要更高的精度,建议使用高分辨率型步进电机。
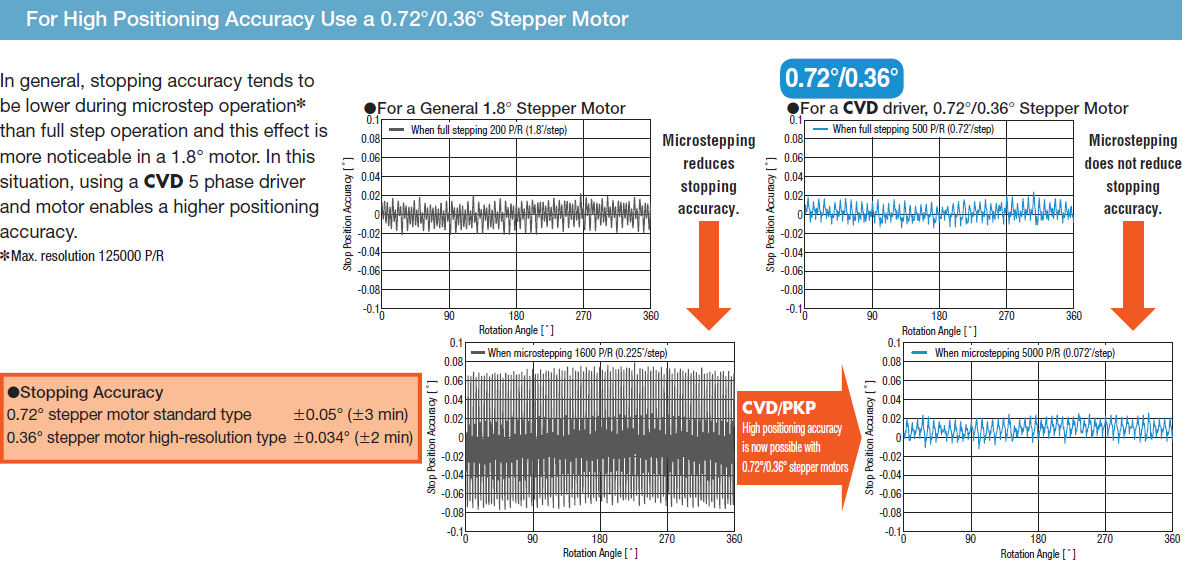
标准 1.8° 和 0.72° PKP 系列标准步进电机的停止精度规格为 +/-0.05°,高分辨率步进电机的停止精度规格为 +/-0.034°。高分辨率步进电机的高齿转子实际上使电机更精确。
CVD 驱动器可用于 2 相和 5 相步进电机。2 相步进电机是最常见的,而 5 相步进电机专为要求低噪音和振动的应用而设计。对于相同的框架尺寸和堆叠长度,带有 CVD 驱动器的 2 相步进电机将提供更多的低速扭矩,而带有 CVD 驱动器的 5 相步进电机将提供更大的高速扭矩。
使用 CVD 驱动器,可以轻松地从 2 相升级到 5 相,因为驱动器尺寸相同。
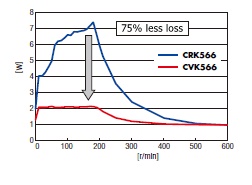
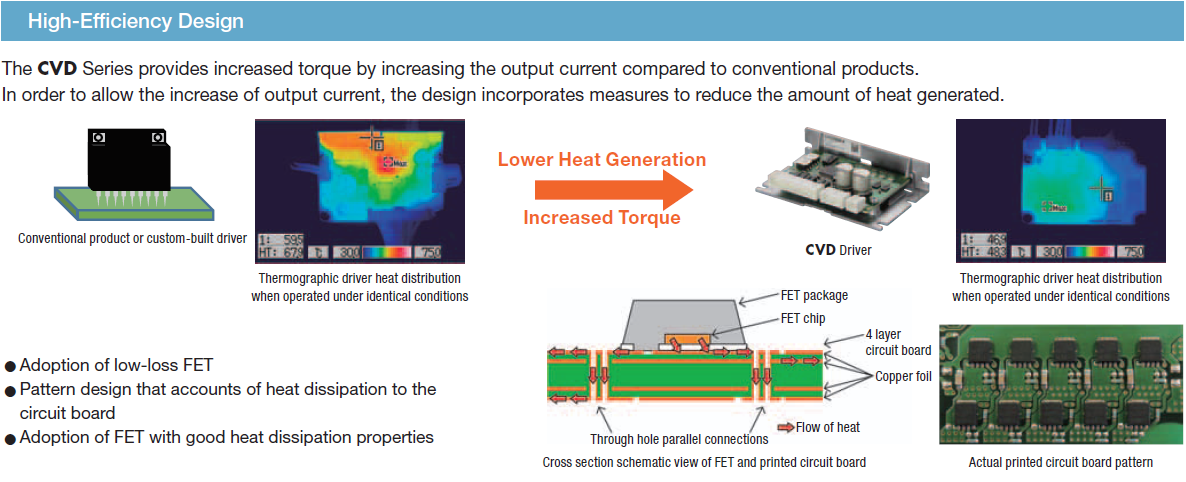
CVD 驱动器还提高了电源效率。最高功率效率出现在大约 175 RPM 时。在这一点上,功率损耗比过去的设计减少了 75%。
由于 CVD 驱动器的所有紧凑性、可用变体、平滑驱动、振动抑制功能以及它能够参考电机数据这一事实,Oriental Motor 认为 CVD 驱动器是用于 PKP 系列步进电机的业界顶级性能驱动器。
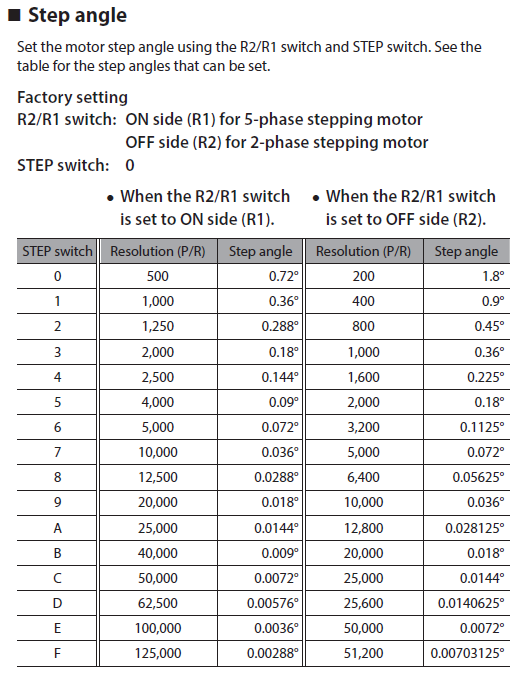
分辨率选择
还有另一个 dip 开关可以从 32 个分辨率设置中进行选择(16 个用于 2 相;16 个用于 5 相)。
散热器是可选的
CVD 驱动器普遍存在的一个独特优势是散热器是可选的。金属安装板实际上是为了安装;不适用于散热器。CVD 驱动器利用低损耗 FET 和优化的 PCB 走线以实现更好的散热。我稍后会解释更多。
| 第二部分:4 种 CVD 驱动器类型 + 产品变体 |
当我们最初发布 CVD 驱动器时,只提供一种类型的驱动器 - 脉冲输入类型。多年来,我们扩大了产品范围,总共包括四种类型和其中的各种变体。有关最新的 CVD 驱动程序系列,请参阅我们的网站。
脉冲输入型
仅董事会
安装板
直角
RS-485通讯类型
安装板
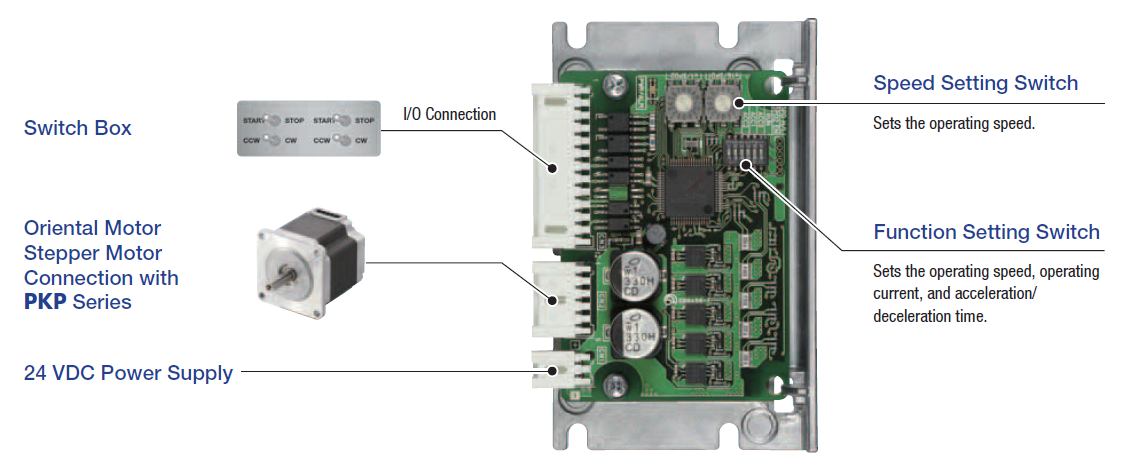
SC型(速度控制型)
内置脉冲发生器
S型(基板安装型)
I/O设定或SPI通讯
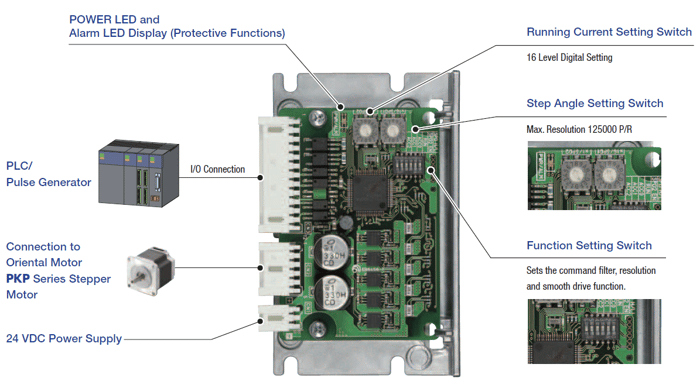
1. 脉冲输入型
除了紧凑之外,CVD 脉冲输入型驱动器是最传统的步进电机驱动器类型。驱动器的 I/O 在 1 脉冲模式下包括“脉冲”和“方向”输入指定,并且相同的输入切换到 2 脉冲模式下的“CW”和“CCW”输入指定。控制器通常连接到这些输入并为电机提供命令信号。虽然脉冲数准确地控制电机运行多远和多快,但脉冲频率 (Hz) 控制其速度。
可选择的步进角和微步滤波器控制
2 种安装类型和连接器配置
警报器
24 VDC 输入 / 0.5A 至 4.5A
CVD 脉冲输入型驱动器有两种变体:仅板和安装板。这些变化更多地与安装和安装有关。脉冲输入驱动器变体之间没有关键的功能差异。
仅限董事会

这是直接通过 4 个螺栓孔安装且不需要散热器的脉冲输入型驱动器的变体。使用高效组件(低损耗 FET)和更好的散热特性(优化跟踪)有助于实现这一目标。
安装板

这个和板子之间有两个区别。首先,明显的区别是增加了安装板,更容易安装。其次,连接器现在是水平方向而不是垂直方向。
2、RS-485通讯方式
这是2021 年发布的最新型CVD 驱动器。与脉冲输入型驱动器的关键功能差异如下所列。
内置存储数据控制器
可存储 256 个运动曲线
RS-485 通信 - 在 RS-485 网络中最多可连接 31 个驱动器
MEXE02 软件 - 使用 GUI 软件更轻松地进行数据、参数设置
内置存储数据功能 - 有助于简化编程
更多I/O——满足更多应用需求
主要更新包括明显的RS-485 通信和与通用MEXE02 支持软件的兼容性。
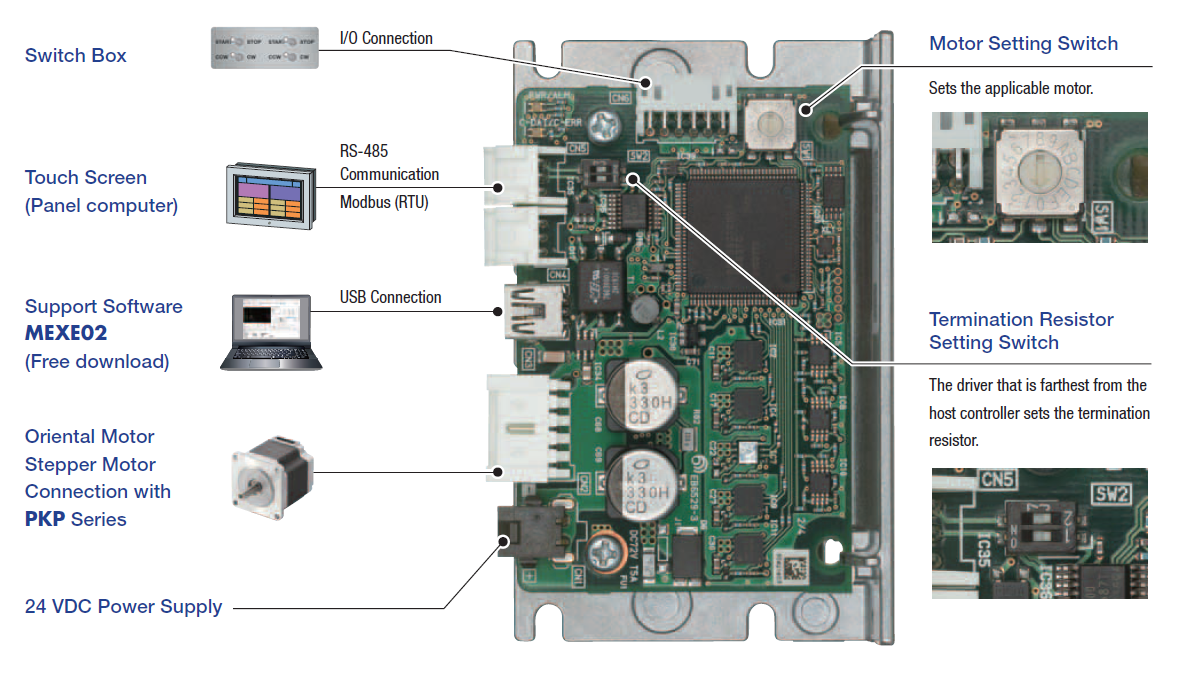
通过 RS-485 网络,最多可以将 31 个驱动器连接在一起。布线被最小化,仅通信而不是 I/O,并且可以改进主机控制器和驱动器之间的通信。
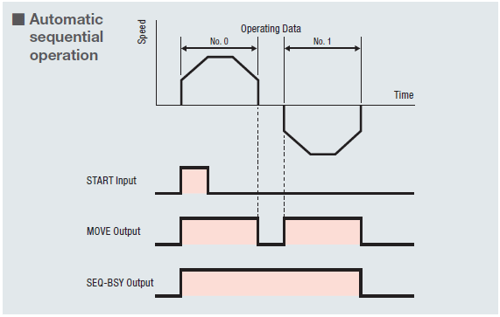
使用 MEXE02 软件,就像按下简单按钮一样。这意味着驱动程序现在包含一个内置控制器。这意味着不需要外部脉冲发生器。借助 Oriental Motor 的存储数据操作,例如点动、连续、定位、自动顺序操作及其 AREA 输出,可以在几分钟内(如果您熟悉,则为几秒)对高级运动序列进行编程。
例如,自动顺序操作允许用户仅通过一个 START 信号“链接”多达 256 个运动曲线序列。
RS-485 通信类型驱动程序满足我们对 CVD 驱动程序的最新更新,该驱动程序改进了网络连接和 GUI 软件的操作。如果您有改进我们产品的建议,请在下方发表评论。
RS-485通信方式有两种。请看下面。
安装板

安装板变体的电机、电源和 I/O 连接器垂直面向。
安装板(直角)

安装板(直角)版本的电机、电源和 I/O 连接器水平面对。
3.SC型
“SC Type”中的“SC”意为“速度控制”。这实际上是 CVD 系列驱动器的简化版本,旨在在速度控制应用中运行步进电机。目前,SC 型驱动器仅适用于 5 相电机。
无需脉冲发生器
可以设置 2 种速度
紧凑型高扭矩步进电机
改进的停止位置重复性
即使在停止时也能保持扭矩
可以连续工作
*需要电机电缆(单独出售)
该驱动程序专为一种或两种速度操作而设计,因此它可能最适合只需要两种存储速度设置的应用。该驱动器的好处是降低了成本并最大限度地减少了占地面积。尽管可以连续运行,但步进电机产生的热量在靠近可能受热不利影响的材料(例如用于研究的生物样品)时可能并不理想。

4.S型
S 型 CVD 驱动器与其他驱动器不同。S 型是最小的 CVD 驱动器,为设计自己的驱动器的工程师提供了捷径。这些驱动器可以很容易地安装在更大的板上以进行多轴控制。与其他 CVD 驱动器类似,I/O 引脚可以垂直或水平定向以适应不同的驱动器设计。
电流设定范围:0.5A ~ 2.8A
32 个电机分辨率设置(16 个用于 2 相,16 个用于 5 相)
驱动电机所需的所有功能都配备在驱动器中
只需在主板上添加一个铝电解电容器
基本性能与CVK系列相同
联系销售人员了解定价和交货时间
由于该产品专为自行设计驱动板的高级用户设计,因此不在网上销售。建议在购买前与我们的技术支持工程师进行产品咨询。
板装型驱动模块 - 水平安装
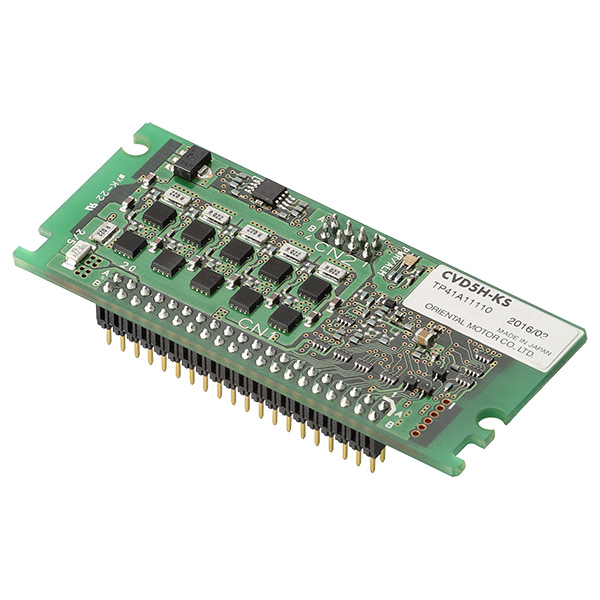
这种变化包括水平引脚,它们与电路板成直角。
板装型驱动模块 - 垂直安装
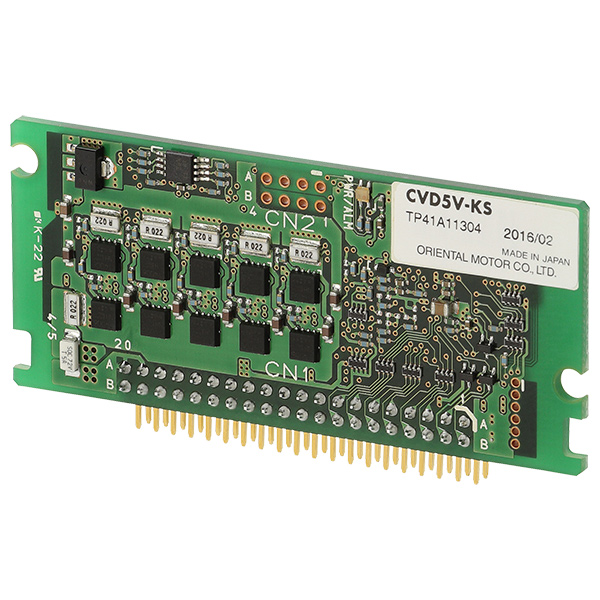
此变体包括垂直引脚,它们与电路板的方向相同。
下表描述了“H”和“V”驱动器变体的不同之处。
对于以上两种产品变体,用户还可以选择I/O 设置或SPI 通信。I/O setting driver 是为单纯想用I/O操作驱动的用户准备的。SPI 通信驱动程序适用于希望使用板级通信来设置某些参数的用户。
要了解有关 SPI 的更多信息,请访问此处的维基百科链接。
如果您想了解有关 S 型驱动器的更多信息,请参阅此处的白皮书,了解其开发过程。
审核编辑 黄宇
-
步进电机驱动器细分怎么调2024-06-12 6258
-
为什么步进电机要加驱动器2024-06-05 4562
-
步进电机驱动器拨码开关怎么调2024-01-15 7759
-
步进电机驱动器的主要驱动方式有哪些?2023-11-14 5073
-
克服旋转振动的CVD系列2相双极步进电机驱动器2023-03-08 2254
-
步进电机驱动器的分类及模块2021-10-02 11433
-
步进电机驱动器调速方法_步进电机驱动器的作用2020-04-20 13486
-
如何设置步进电机驱动器的参数2019-10-07 48183
-
步进电机驱动器工作模式_步进电机驱动器电路图2019-10-01 10683
-
七特步进电机驱动器型号2018-11-21 2582
-
步进驱动器说明书_步进电机驱动器怎么用_步进驱动器维修2017-08-15 41881
全部0条评论

快来发表一下你的评论吧 !
