

减少步进电机振动的技巧
工业控制
描述
步进电机振动。这就是他们所做的。为了最大限度地减少电机振动,首先我们需要了解它们的来源。
步进电机通过组合特定旋转角度的小“步进”,无需编码器的帮助,即可提供精确的位置控制。然而,它们在步骤之间表现出微小的振动。虽然大多数时候振动是无法观察到的,但振动确实会转化为噪音,这种噪音可能会通过连接到电机的其他机制被放大。在尝试解决问题之前了解振动的来源非常重要。
正如您在上面的视频中看到的,振动是不明显的。然而,如果你从显微镜下看,它实际上会显示电机轴实际上每一步都有超调和欠调。在下面的视频中,我们使用 5 相 0.72° 步进电机来演示其 1 步振动特性以及步进电机性能在更高速度下更平滑的原因。
在步进电机内部,转子和定子之间有一个微小的气隙,磁通量在气隙中流动,唯一存在的摩擦是在滚珠轴承中。当命令电机移动和停止时,滚珠轴承中没有足够的摩擦力来阻止超速。这意味着由于惯性力,电机轴在每一步都会先过冲然后下冲。电机轴或转子停止这种过冲和下冲所需的时间称为“稳定时间”。
在某些情况下,步进引起的振动会变得足够大,从而导致步进失误或噪音过大,例如在共振频率下运行时。共振频率源自扭矩刚度和惯性之间的关系,改变任一参数都可以将共振频率移到工作范围之外以提高性能。 避开电机的共振频率是消除此类振动的简单方法。
在下面的视频中,我们展示了如何测量振动以及它如何在不同速度下发生变化。
虽然可能无法完全消除步进电机的振动,但有许多方法可以通过机械或电气方式解决此问题。
在这篇文章中,我们将讨论最常见和最有效的降低振动的方法。
减少振动的机械方法
首先,我们将介绍最常见的减少步进电机振动的机械方法。
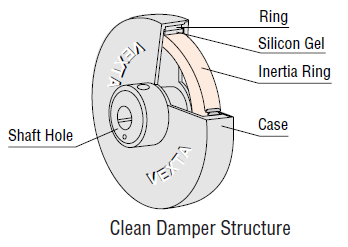
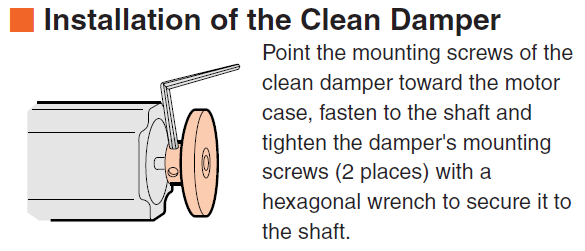
1. 安装机械清洁风门。
一个简单的减少振动的方法是在电机的后轴上安装一个干净的阻尼器。清洁阻尼器基本上是密封的塑料外壳,带有一个装有硅胶的惯性主体。额外的惯性和硅胶有助于吸收振动并提供稳定的阻尼效果。
2.使用高分辨率型步进电机。
一些电机制造商提供的步进电机具有更多的转子齿数(100 个而不是 50 个)。齿数的增加使整步分辨率加倍,并有助于降低振动幅度,因为电机现在每步移动的距离更短。 这意味着标准的 1.8° 2 相步进电机变为 0.9° 电机,标准 0.72° 5 相步进电机变为 0.36° 电机。甚至可以通过齿轮传动或微步进实现更精细的分辨率,这也在下面进行了介绍。
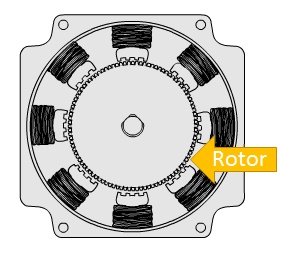
另一个好处是,100 齿转子还提高了电机的停止位置精度,适用于精确位置控制应用,如下面的视频所示。
3.使用5相步进电机。
与高分辨率型步进电机类似,5 相 0.72° 步进电机与 2 相 1.8° 步进电机相比,也可以实现更精细的整步分辨率并减少振动。与 2 相电机相比,5 相电机具有相同的转子,但有 10 个定子极而不是 8 个。这将整步分辨率从每转 200 步增加到 500 步。请务必注意,停止位置精度是齿数(而非分辨率)的函数,因此与标准 2 相比,高分辨率型 2 相或 5 相(0.9° 或 0.36°)电机仍可提供更好的停止精度相或 5 相(1.8° 或 0.72°)电机。
4.使用齿轮步进电机。
减速机通常用于提高扭矩同时降低电机转速,但增加的刚性有助于抑制振动从电机传递到负载,齿轮摩擦有助于减少超调和欠调,其一致的扭矩输出可提供更稳定的运行.
根据齿轮比,可以降低电机自身的振动。
可以避免低速振动范围,因为电机以更高的速度旋转。
无减速机带减速机
5. 对电机进行彻底的选型。
确定电机的大小涉及找到电机可以舒适运行的“最佳位置”。试图根据最大规格来确定电机的尺寸是错误的。例如,步进电机的速度-扭矩曲线描绘了电机将在何处失速,因此绝对不建议完全按照这些规格来确定电机尺寸。同样重要的是不要使电机尺寸过大,因为过大的扭矩可能会增加振动量。如果你确实加大了步进电机的尺寸,你可以通过降低电机电流来减少过大的扭矩(提示:电流与扭矩成正比)。
惯性被定义为物体对速度变化的抵抗力,并且经常被忽视。选择齿轮比时,注意不要超过推荐的“惯性比”。对于无齿轮步进电机,其惯量比的计算方法是将总负载惯量除以转子惯量。对于减速电机,其惯量比是通过将总负载惯量除以转子惯量 x 齿轮比的平方来计算的。
对电机要求进行全面分析并在必要时提供足够的安全系数只会有助于保证长期性能。许多制造商提供尺寸调整软件来简化此过程。
除电机外,机器中可能还有其他部件也会产生振动。在某些情况下,步进电机的振动可能会被连接到电机的外部机构放大。确保没有任何松动,必要时使用橡胶索环来降低噪音。
减少振动的电气方法
您还可以通过多种方式以电气方式(或通过驱动器)减少振动。
1.使用微步进电机驱动器
传统上,微步可能是最推荐的方法。微步是通过在相位之间划分电机电流来实现的,这是通过驱动器完成的。通过微步进,驱动器精确控制扭矩和位置的能力极大地影响了其减少扭矩波动、振动和可闻噪声的能力。 不一致的相电流会由于不均匀的步进或扭矩而增加振动。如果驱动器不能精确调节电流或提供均匀的电流波形,那么无论电机制造得多么好,电机都会振动。
以下视频演示了微步的工作原理。
然而,在许多情况下,所有速度范围内的振动都无法仅通过微步来解决。
2.使用独立解决振动的驱动程序
Oriental Motor 的 CVD 双极恒流斩波驱动器(来自 CVK 系列)专门设计用于通过独立处理每种类型的振动在所有速度范围内提供低振动性能。由于采用单独的相电流检测器,这些驱动器可以很好地调节电流并提供非常均匀的电流波形。
与使用模拟电位器设置电机电流的传统方法相比,CVD 驱动器采用数字化电流控制。 通过更好的电流控制,电机停止精度也得到提高。虽然我们将停止位置精度指定为 +/-0.05°,但实际上即使在微步进过程中,电机在现实生活中的性能也要好得多。
CVD 驱动器以不同方式处理每种类型的振动。以下是步进电机表现出的3 种主要振动类型。
低速振动(约0~50 RPM是步进运动引起的
中速振动(约50~200 RPM)是由扭矩变化或共振频率引起的
高速振动(约500 RPM及以上)是由反电动势和恒流控制不稳定引起的。
CVD 驱动器具有独特的Smooth Drive全时微步功能,可提供具有全步分辨率控制的微步性能。激活后,驱动器将在内部对电机进行微步(每 1.8° 整步 2,048 步),同时控制器以整步分辨率提供脉冲。Smooth Drive 功能最初是为了减轻脉冲发生器的负担而开发的,它可以减少所有速度范围内的振动,尤其是在 0 至 50 RPM 的低速范围内。驱动器中还内置了电流励磁相位校正功能,可通过优化扭矩矢量减少 50 至 200 RPM 速度范围内的振动。这减少了转矩脉动和共振。此外,电流补偿控制通过使用电机数据和独特的算法减少 500 RPM 及以上的振动,只有同时设计电机和驱动器的制造商才能提供这种算法。
审核编辑:汤梓红
-
步进电机低速时振动大是什么原因?2024-01-10 8702
-
步进电机噪声与振动的抑制2018-10-12 2856
-
步进电机使用之噪声与振动的抑制总结2018-10-25 2621
-
为什么步进电机只有振动但不转圈圈?2019-07-07 5062
-
步进电机基础(8.2)-步进电机的问题解决方案-降低振动噪音的解决方法 相关资料分享2021-07-08 1341
-
如何消除步进电机的噪音和振动?2021-08-12 2763
-
什么是步进电机共振?避免共振的措施有哪些2023-03-10 2558
-
步进电机只有振动不转圈的原因?2023-10-17 706
-
降低步进电机振动、噪音的解决方法2019-12-10 10985
-
步进电机的噪音来源,如何使步进电机完全静音2022-04-24 7919
-
改进步进电机的扭矩和振动设计2023-03-07 2128
-
步进电机噪声和振动过大解决2023-03-22 1374
-
如何从生产制造环节减少电机振动因素?2023-11-06 1667
-
如何减少步进电机中的可闻噪音2024-09-25 540
-
如何减少步进电机的发热?2025-05-11 1464
全部0条评论

快来发表一下你的评论吧 !
