

基于无人机遥感的喀斯特高原峡谷区火龙果单株识别提取方法
电子说
描述
引言
火龙果作为热带、亚热带地区的典型经济作物,具有极强的经济价值,如何快速、精准识别提取植株能为火龙果产业估产、监测提供技术支撑,实现农业的“粗放”向“精细”转型。精准农业已经成为当今世界农业发展的新趋势,也是中国现代化农业发展的主流方向,尤其可以为喀斯特高原峡谷区有限的土地空间提供科学、量化的管理与利用。
无人机遥感是指利用先进的人机分离操控技术,GPS差分定位技术,搭载不同的传感器,按需自动快速获取高分辨率影像的新兴应用技术。随着小型无人机技术的日臻成熟,无人机作为一种新型的低空遥感平台,因其在低空飞行可避开云雾的影响、成图周期短、分辨率高、机动性强、灵活性好、造价低且方便携带等的优势,有效地弥补了传统卫星遥感在喀斯特高原峡谷区获取影像受云层遮挡和地形影响的不足,在诸多领域得到了广泛应用。
国内外学者基于无人机可见光影像研究作物的时间轴线主要从监测、分类到识别提取,前期集中在中、低分辨率尺度的监测;中期逐渐过渡到对地物的分类上。如部分学者充分利用可见光镜头红(R)、绿(G)、蓝(B)三波段研究了几种主要的颜色植被指数并在应用中取得了良好效果。当下基于颜色指数的应用主要集中在对植被的识别以及地物分类上,在典型经济作物的单株提取方面还未见更多的报道。
尽管学者们对无人机可见光影像从研究维度和形态方面做了大量基础工作,但目前对于喀斯特高原峡谷区典型经济作物的单株提取算法探讨并不多。鉴于此,在前人研究的基础上,本研究拟深度解析目前主要的5种可见光波段颜色植被指数(VDⅥ、ExG、ExG—ExR、NGRDI、GLI)应用于火龙果植株识别,进行作物阈值分割,并结合可视化空间建模工具模型构建器(ModelBuilder),构建火龙果单株提取模型,以期能获得一种有效识别提取火龙果植株的方法,促进无人机遥感在喀斯特高原峡谷区的应用。
材料与方法
2.1 研究区、数据采集与处理
实验数据包括火龙果航片与精度验证数据,正射航片数据一般选天气温和的T12:00--14:00进行拍摄,此时太阳高度角基本垂直地表,可以减少因光线倾斜造成的作物阴影。其中,航片采集时间为2018—11.05T13:00,研究区为贵州省西南部关岭县以南、贞丰县以北的北盘江流域喀斯特高原峡谷区火龙果基地,(图1)。
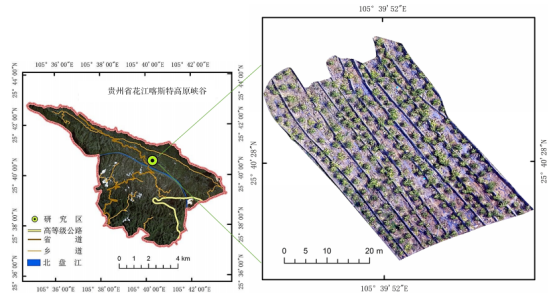
图1 研究区无人机可见光影像
根据研究区地形条件与火龙果植株长势特征,飞行高度设置80m、航向重叠度为75%、旁向重叠度为70%,拍照模式为定点悬停拍摄。影像拼接内容主要包括航片纠正、空三处理和精度评估等。影像预处理主要纠正航片获取过程中因无人机抖动产生的变形、扭曲、失真、模糊和噪音,并对其进行图像增强、整饰、裁剪、重建获取研究区厘米级高分辨率影像。精度验证数据以可见光影像为底图、人机交互采集并于基地验证获取。
2.2 火龙果植株特征
火龙果主要分布于海南、广东、广西和贵州等热带、亚热带地区。植株种植行间距3mx2m,喜光耐阴、耐热耐旱、喜肥耐瘠,形态呈星状分布,以支撑柱为中心向四周延伸,叶片棱常为翅状,边缘波状或圆齿状,颜色呈淡蓝色至深绿色(图2一a,植株分支较多,郁闭度较高,分离度较好,影像获取时火龙果处于挂果期,植株枝繁叶茂,且季相正值秋末冬至,杂草多半枯死,形成仅包含目标地物与裸地的相对理想的研究环境,利用ENVl5.3中的光谱曲线工具多次对比验证得到火龙果在绿波段高反射、蓝波段高吸收,裸地在绿波段高吸收的特性,描绘出火龙果与裸地波普曲线(图2一b、C,综上特征,基于可见光影像构建RGB三波段植被指数识别提取单株火龙果可行性增强。
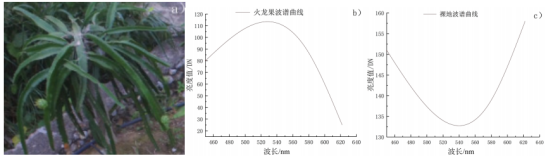
图2火龙果植株样例(a)、其波谱曲线(b)及裸地波谱曲线(C)
2.3 研究方法
2.3.1 火龙果植株识别指数
可见光波段差异植被指数(VDVI)的构建是参照当前最流行应用的归一化植被指数NDVI(的构造原理及形式

式中:ρNIR为近红外波段;ρR为红光波段。充分考虑植被对可见光绿波段的强反射,红、蓝波段的强吸收,以绿光波段ρG代替NDVI中的ρNm,以红、蓝波段组合(ρR+ρB)代替NDVI中的ρR,并将ρG×2使其在数值上与(ρR+ρB)相当,获得VDVI植被指数公式:

式中:p占为蓝光波段。过绿指数,ExG)主要用在自动分离作物与土壤方面,计算公式为:

式中:G为绿波段;R为红波段;B为蓝波段。归一化绿红差异指数(NGRDI)主要目的是消除不同辐照度对植被光谱特征的影像,使用绿光波段与红光波段之差做归一化比值指数,计算公式为:

ρG七PR过绿减过红指数ExG—ExR作为一种改进的颜色指数,通过将ExG指数图像相减,发现0阈值的ExG—ExR指数可以很好地将目标地物与背景分离,计算公式为:

绿叶指数(GLI)通过判断红、蓝波段像元值(DN)的平均值是否大于绿光波段DN值来生成灰度图像,并进行归一化处理,使结果图像的像元值在[-1,1]。一般隋况下,负值代表土壤与非植被区域,正值区域则为植被,计算公式为

式中:R、G、B表示红、绿、蓝3个波段的像元值,分别对应可见光无人机影像的Bandl、Band2、Band3。
2.3.2 阈值分割
1)双峰直方图双峰直方图有2个明显的波峰,分别对应背景值与目标值较多数目的点,两峰之间的峰谷即为划分目标与背景的最佳阈值。理想的双峰曲线有分明的波峰波谷,但地物受到多种背景因素的干扰,双峰一般难达到理想效果。
2)最大类间方差(OTSU)OTSU算法是由日本学者OTSU于1979年提出的一种对图像进行二值化的高效算法,也称为最大类问方差法,它是按照图像的灰度特性将其分为背景和目标2部分,其核心思想是当阈值礅目标与背景之间的类方差最大时,T为识别提取目标地物的最佳阈值。
2.3.3 火龙果植株单株提取
通过可见光波段植被指数方法识别分割出的火龙果植株区域,需进行再次分类去除星碎斑块以及无关地物,结合ArcGIS工具的可视化空间建模模型构建器,提出一种以单颗植株平均面积分割株丛的思想,构建火龙果单株自动提取及精度验证的快捷批处理模型(图3)。
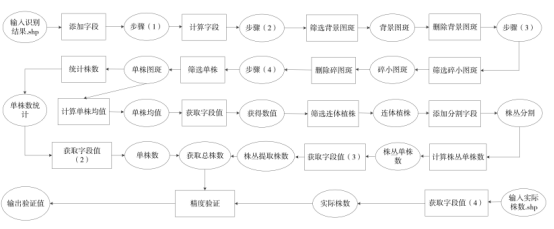
图3火龙果植株单株提取及精度验证模型
内容包括:
1)计算每块矢量斑块的面积;
2)筛选碎小斑块以及背景图斑并删除;
3)判断统计的植株图斑是否分离彻底;
4)统计分离完好的单颗植株数量;
5)提取单颗植株的平均面积;
6)筛选连体图斑并除以单颗植株面积获得每一块连体植株的分割数量;
7)统计单株数与连体分割数获得总株数;
8)将提取的总株数与实际植株株数进行精度验证,公式为:

N式中:尺表示正确率;M表示提取株数;N表示实际株数。火龙果植株单株提取技术路线如图4。
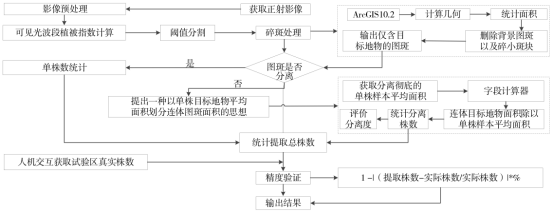
图4火龙果识别提取技术路线
3、结果分析
3.1 植被指数计算及分析
利用ENVl5.3软件中的波段计算工具分别代人式(2~6)计算5种植被指数,其中可见光波段差异植被指数(VDVI)需要转化为浮点型计算,获得各植被指数的灰度图(图5)。
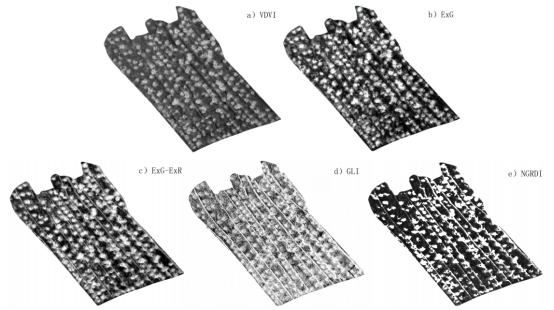
图5可见光波段植被指数计算结果
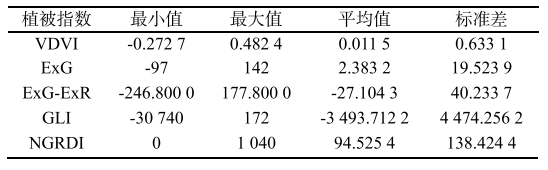
其中,图5一a、b、c的白色或灰白色区域为目标地物,黑色区域为土壤、碎石、枯草和梯埂等背景值,目标地物与背景值有较明显的区分界线,分离度较好,植被指数的大小与其色调的亮暗程度成正相关,色调越暗,植被指数越小,反之则越大。图5-d中,植被指数提取结果混乱,目标地物与背景值分布零碎没有明显的分割边界,图5一e中白色区域混杂了目标地物与混凝土堆砌的梯埂,GLI和NGRDI颜色指数计算结果的目标地物与背景交叉严重,重叠现象明显且标准差较大,反映了组内个体问的离散程度较大,在一定程度上说明了GLI与NGRDI并不适宜于火龙果的单株识别提取(表1)。
表1 各植被指数灰度特征值统计
3.2 阙值提取分析
从图6可知,VDVI、ExG、ExG—ExR三种植被指数有较明显的双峰效果,可利用双峰直方图阈值分割方法获取火龙果与背景值的分割阈值,而NGRDI与GLI的灰度直方图双峰效果不突出,因此使用自动阈值提取的最大类间方差法(OTSU)获取其阈值(表2)。
表2各植被指数波段阈值

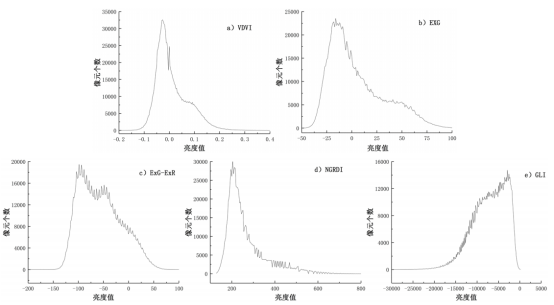
图6可见光波段植被指数灰度直方网
通过对比双峰直方图与OTSU获取的阈值(见表2)发现,其中VDVI通过OTSU方法获取的阈值相较双峰直方图增加了0.0079,ExG减少了3.5495,ExG—ExR增加了17.4148,可见2种分割方法获取的阈值并没有完全叠合,但整体都处在一个相对稳定的波动范围内。
3.3 植被识别指数比较分析
选取上述OTSU方法获取的阈值,分别对5种指数进行目标地物与背景值的分割得到火龙果的识别提取(图7),并进行特征值统计(表3)。
表3五种指数特征值统计

由图7可见,VDVI与ExG相ELExG—ExR、NGRDI和GLI有明显的分割效果,研究区像元数量总数为2199075,其中,VDVI提取的火龙果区域像元数量占整个研究区的13.94%,正确率为97.43%,Kappa系数为0.9607(见表3),火龙果识别度较高,且分离度也较好。ExG.ExR与GLI提取的火龙果区域像元数量超过了整个研究区的60%,正确率仅为42.57%、58.96%。显然这2种指数把其他地物或背景值错分成了目标地物,理论上可以判定这2种指数不适宜作为火龙果单株识别提取的方法。NGRDI的目标地物像元比例仅为6.61%,该指数漏提了大部分火龙果区域,把提取的部分目标区域归为空值,获取的最终值与真实值存在较大偏差。而ExG相较ExG—ExR、NGRDI、GLI虽然有明显的识别提取效果,但与VDVI相比还是存在一定的漏提错分现象。综上所述,VDVI为火龙果单株识别提取的最佳指数。
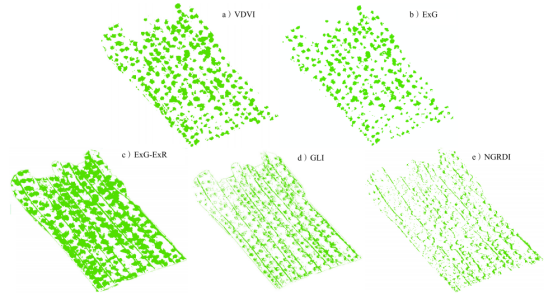
图7火龙果区域识别结果
3.4 火龙果植株单株提取分析
通过VDVI指数的方法识别并分割出的火龙果植株区域,结合ArcGIS工具的可视化空间建模模型构建器,以单颗植株平均面积分割株丛,提取结果见图8。
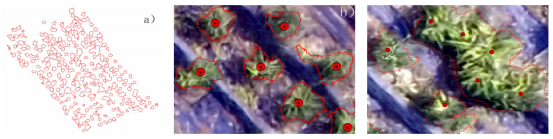
图8火龙果分割效果(a.VDVI矢量斑块;b.单株斑块;C.株丛斑块)
从表4可知,单株的平均面积为143.6821dm2,分离完好的单颗植株仅占总植株数的50.20%。研究区将近一半的植株处于连体状态,连体植株的单块面积最大值达到了1260.6204dm2,个别斑块连体现象明显,分离并不彻底(见图8),其中植株的自然枝繁叶茂以及疏于管理造成的倒伏是导致植株连体现象的主要原因。自动提取的植株总数为320棵,人机交互野外验证获取的实际株数为295棵,自动提取的株数比实际株数多了25棵,代人公式(13)可得提取精度为91.7%,造成多提错分的原因主要来源于连体植株的阴影及部分杂草的干扰,错将其面积归为目标地物。
表4 VDVI提取各指标特征值统计

4、结论
本文依托小型无人机平台采集了喀斯特高原峡谷研究区厘米级的高分辨率影像,在分析目标地物与土壤、碎石和梯梗等背景的综合光谱特征基础上,利用VDVI、NGRDI、ExG、ExG—ExR和GLI等基于可见光波段的颜色指数分别对研究区高分辨影像进行实验,根据提取结果特征统计,对t95种指数运用在喀斯特高原峡谷区典型经济作物火龙果识别提取的适用性,使用双峰直方图和最大类间方差法(OTSU)进行阈值提取,获得5种指数对目标地物与背景的最佳分割阈值,提出以单株平均面积分割连体植株的思想,结合模型构建器实现了对研究区目标地物的单株提取,提高了工作效率,为喀斯特山区典型经济作物单株识别提取方法提供了参考。研究表明:
1)可见光波段植被指数(VDVI)相比其他4种植被指数(ExG、ExG—ExR、NGRDI和GLI)对研究区的目标地物识别效果最好;
2)通过人机交互野外验证获取实际株数与识别提取株数精度得出,自动识别提取的精度为91.7%;
3)使用基于可见光波段的颜色指数方法对喀斯特高原峡谷区典型经济作物的精准识别提取是可行的。本文选取特殊地形地貌——贵州喀斯特高原峡谷作为研究区,使用小型无人机平台采集影像数据的方案有效地弥补了喀斯特山区传统卫星遥感获取影像精度不足的缺陷。
本文实验数据因其采集季相的特殊性,干扰杂物较少,分离度较高,识别提取的作物生长环境基本呈目标地物与裸地状态,因而本研究方法目前仅适用于背景杂物相对干净的区域。如何辨别杂草对目标地物的干扰以及不同生长环境地块间的提取精度还有待进一步的研究。另外,如何结合深度学习与地物光谱特征提高识别提取精度也是未来研究的方向。
欢迎关注公众号:莱森光学,了解更多光谱知识。
莱森光学(深圳)有限公司是一家提供光机电一体化集成解决方案的高科技公司,我们专注于光谱传感和光电应用系统的研发、生产和销售。
审核编辑 黄宇
-
基于无人机多光谱遥感的棉花生长参数和产量估算2024-08-21 2114
-
基于无人机高光谱谣感的蕴地退化指示物种的识别2024-08-01 1225
-
基于无人机高光谱遥感的森林可燃物分类方法研究-莱森光学2023-06-02 2038
-
DshanMCU-火龙果入坑指北2022-09-13 47967
-
无人机水质遥感监测方法2022-03-03 4208
-
基于无人机高光谱遥感的火龙果种植株数提取技术2022-01-07 1913
-
基于图像分割的无人机遥感影像目标提取技术2021-06-29 1158
-
火龙果ZYNQ FPGA开发板的电路原理图免费下载2020-03-09 2187
-
无人机可为气象领域做什么?2019-06-06 14066
-
无人机 | 飞马智能航测/遥感/侦查系统V系列完成高原测试2019-05-14 4679
-
无人机遥感技术的特点及应用2017-10-12 1698
-
高精度晶振是各大厂商无人机遥感技术大PK的关键2016-06-23 2827
-
无人机遥感技术2016-03-11 8264
-
无人机遥感系统的研究进展与应用前景2016-01-08 1281
全部0条评论

快来发表一下你的评论吧 !
