

小米扫地机内部结构拆解分析
描述
咋个又搞起扫地机了,害,入手一套代码,好奇心溢出来了,搓几篇文章。
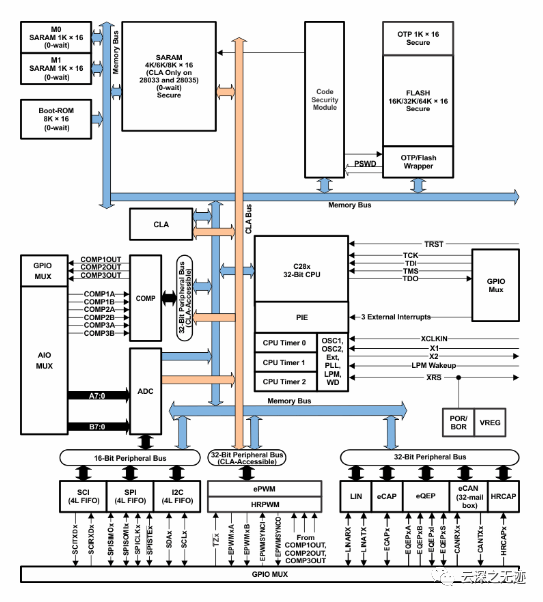
首先我们只针对下面的驱动运行,而不追究上层的建图和规划,其实对于我们现在来说,只要找到外设的接口对应MCU的IO,然后外设找对就行,电路不用考虑,验证过了。
去官网看看去!
这所有的扫地机都一样
真屌的名字,不就是SLAM和超声波方案
倒也不全是圆的,还有这种的
这个我不敢BB,因为我没有拆过不知道有没有摄像头
这个不错,我研究过云鲸的
米家扫地机基于空气动力学的流线型风道设计,喇叭口状(貌似很有道理哈,想想吹风机)设计形成高静压区,大幅增强吸力,而风道内壁迎风侧三段弧面设计,平滑引导气流,可大幅提高风量利用率。
Allwinner ARM Cortex-A7架构的四核应用处理器,这个用来SLAM和视觉,下一个DSP是雷达的,后面是机器的驱动部分
DSP很少见(我没见识)

你敢相信在这里头,在激光雷达里面呀

配色好看

黄框美光MT41K256M16TW-107 DDR3LSDRAM,橙框AXP223电源系统管理芯片,红框东芝THGBMDG5D1LBAIL 4GB se-MMC,绿框RTL8189ETV无线模块:

ST意法半导体ARM Cortex-M3架构的微控制器

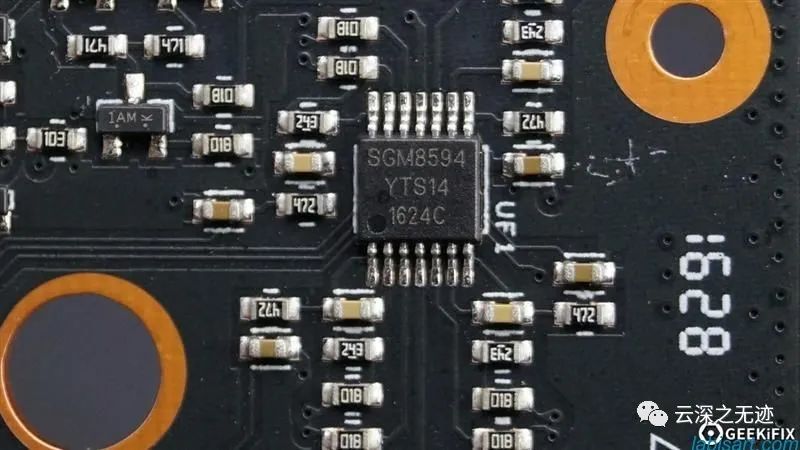
SGM8594精密运算放大器
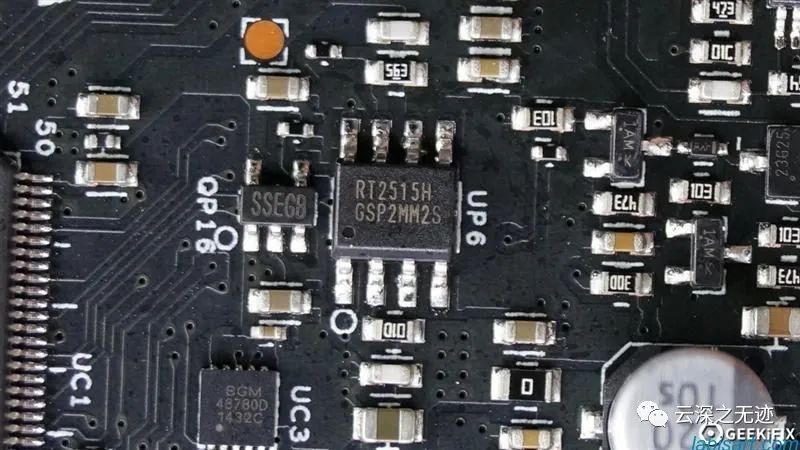
RT8279DC-DC降压IC,内部集成MOSFET

RTL8189ETV无线模块以及PCB天线

开关微动按键与其蓝白双色LED背景灯
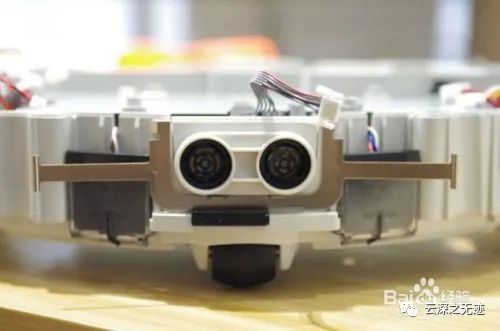

超声波

PCB上方的是东芝TC74HC4049A反相缓冲器

SGM722970µA 10MHz Rail-to-RailI/OC MOS Operational Amplifier运算放大器,TI德州仪器HC0263A
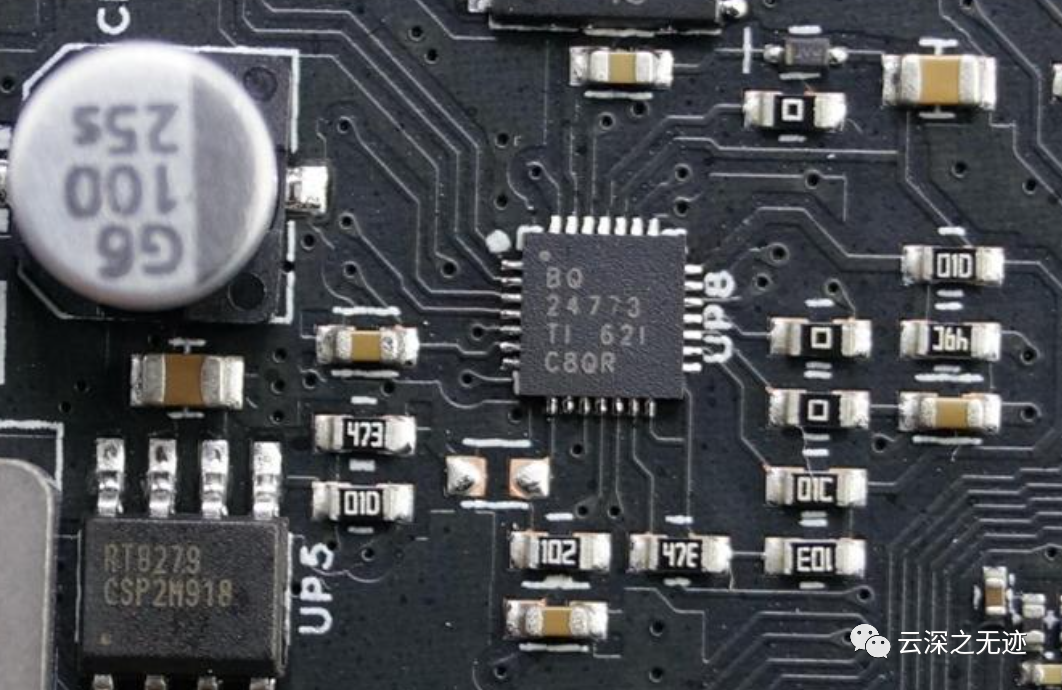
TI德州仪器BQ24773充电管理IC
MC34063A(电源管理芯片)【降压为各芯片提供电源】 AO4407A(场效应管)【配合电源芯片提供大电流】 AM2849(直流电机驱动模块)【主要是驱动两个轮的电机】 LM324(四运放)【为红外模块提供服务】 5W4ΩJ(水泥电阻)【大电流】 万变不离其宗的电路理念:一块主板,最主要的是核心芯片,其它就是辅助作用的模块芯片,然后才是组成模块的外围电路。学习要从整体,从大局入手,再分解到一些小单元。 探索方向:主芯片->模块芯片->围元件;这跟学基础不同,学基础是相反的。

在系统中有BMI的代码,看遍小米家的东西也没有这个方案
我后面找到一个这样的东西,我觉得合理!
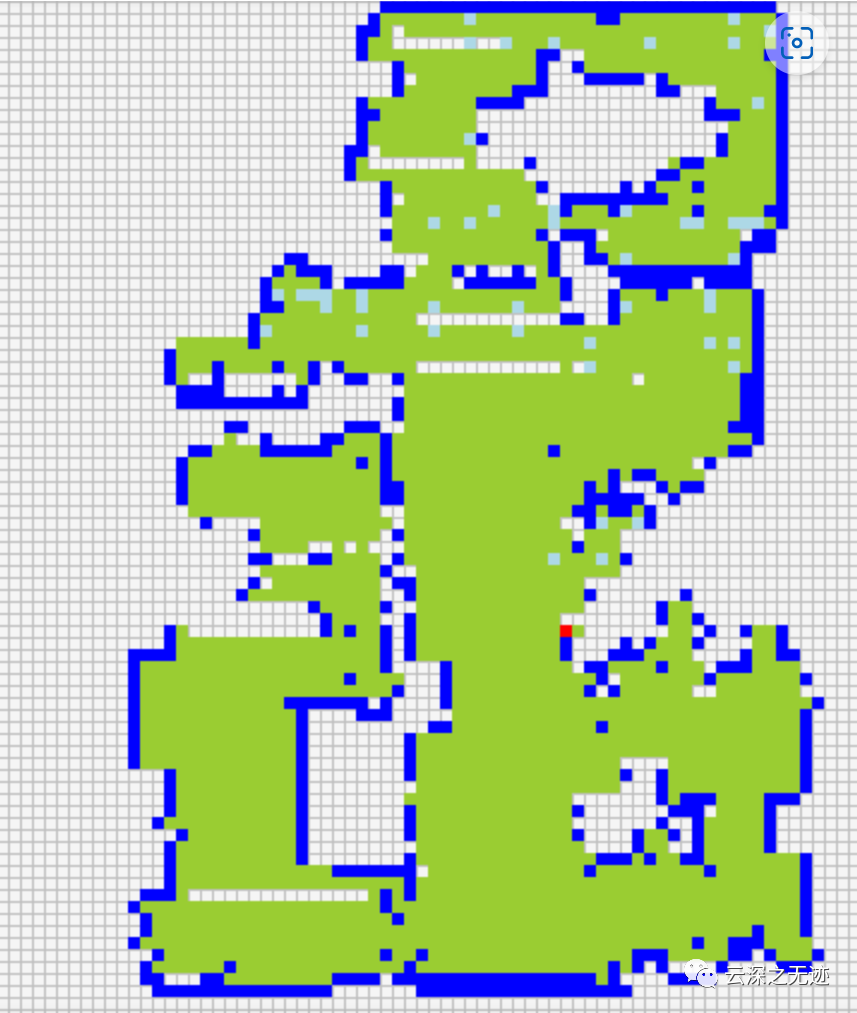
系统基于陀螺仪实现惯性导航,室内定位,实现智能扫地机器人全屋覆盖清洁算法:
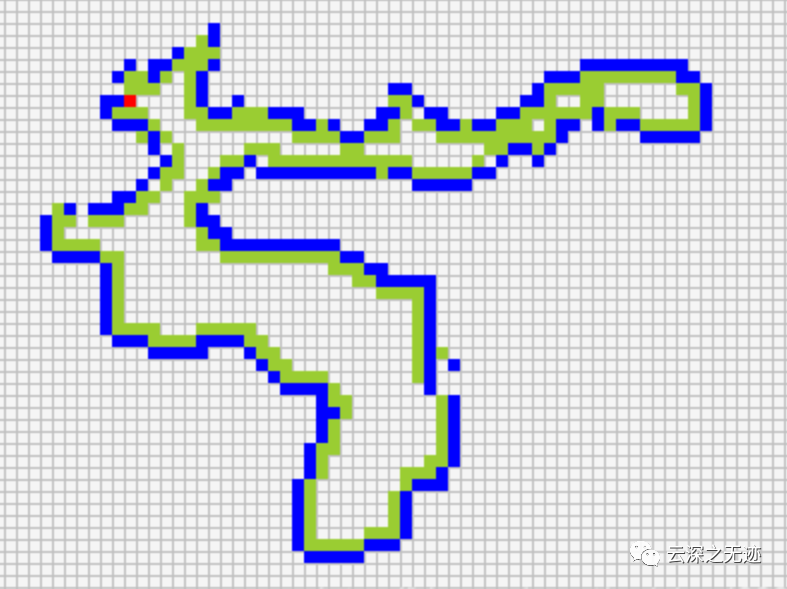
惯导系统
所以应该是陀螺仪地图导航技术,是一种利用惯性元件,通过微芯片处理器执行计算,融合高精度陀螺仪及加速度计码盘等数据,在运动中执行惯性导航,建立地图的技术。
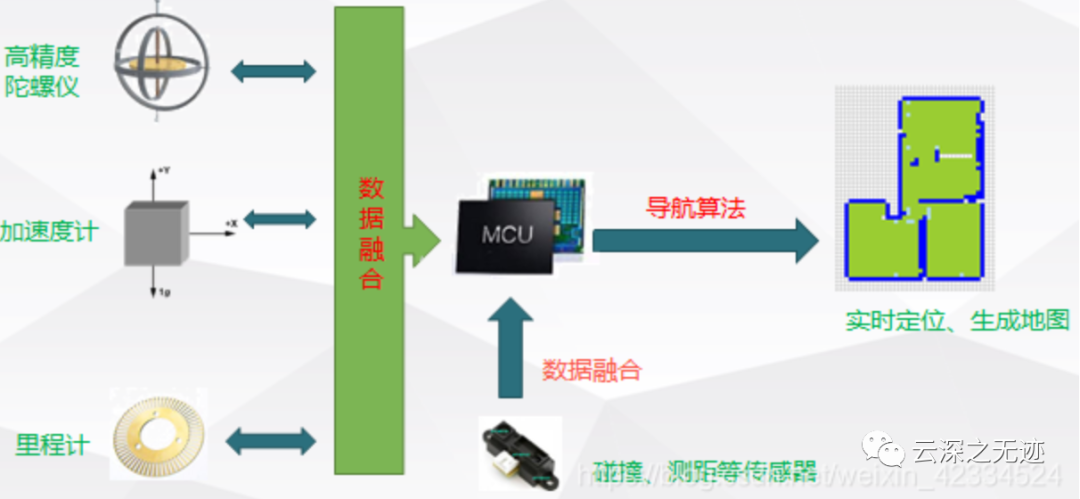
精巧的SLAM系统
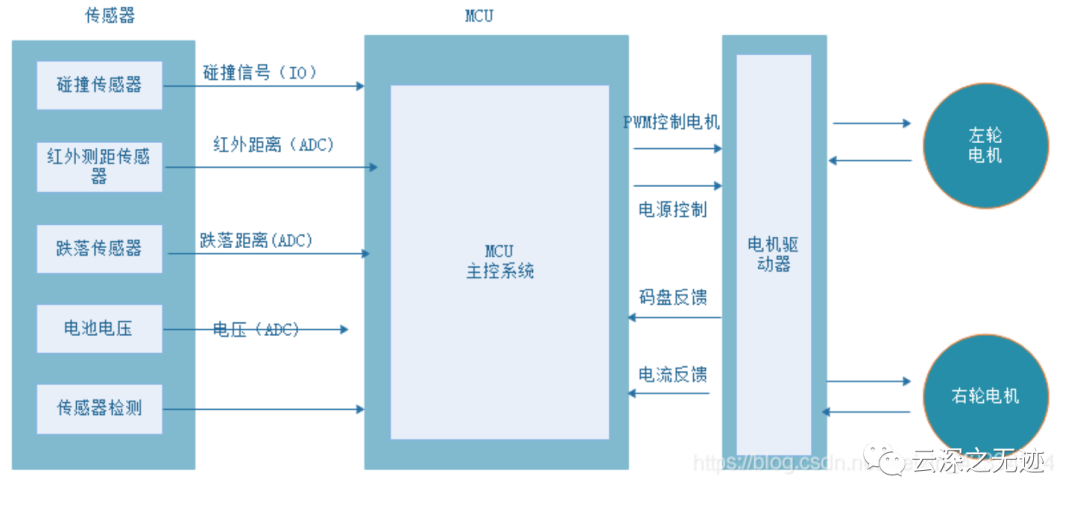
系统构架
编辑:黄飞
-
我们拆了一款Tof+AI避障的扫地机2023-05-26 6768
-
小米扫地机器人功能介绍以及芯片参数2021-10-28 4269
-
扫地机的自动回充方式2021-09-14 2234
-
手机如何连接小米扫地机器人_小米扫地机器人怎么连wifi2018-01-05 180228
-
你对扫地机了解多少?2017-11-30 2745
-
单片机内部结构分析2017-10-23 7334
-
小米扫地机器人拆解报告2017-06-12 13805
-
智能扫地机器人解决方案2017-05-27 8853
-
扫地机器人怎么制作2017-01-12 7875
-
小米扫地机器人上手:家居能手2016-09-28 8363
-
原来扫地机器人是这样工作的!2015-12-24 31615
-
扫地机器人方案2015-05-18 10665
-
扫地机器人结构、工作原理和主要技术2015-02-05 15479
-
扫地机器人如何选购?2015-01-21 7882
全部0条评论

快来发表一下你的评论吧 !
