

集成智能第2部分:电机启动开环加速
工业控制
描述
基于反电动势 (BEMF) 估计的高级无传感器算法需要最小值 BEMF 来准确估计转子的位置,以便在 180 度正弦模式下驱动 BLDC 电机。为了获得最小BEMF值,电机首先通过开环阶段驱动,直到达到最小速度,然后使用估计的BEMF在闭环中进行换向。电机启动分为两个阶段:第一,当电机处于静止状态时;其次,当它在没有 BEMF 信息的情况下开始加速时,如图 1 所示。
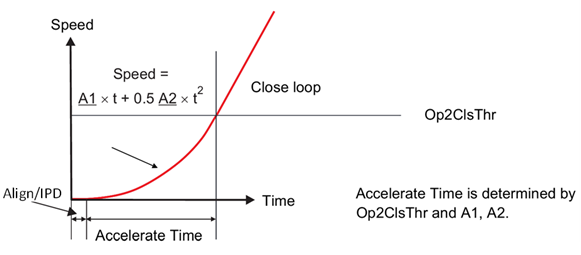
图 1:BLDC 电机的启动曲线,如 TI 的 DRV10983-Q1、DRV10987 和 DRV10983 的数据手册所示
在开环期间,电机在没有任何关于转子位置的信息的情况下行驶。开环换向的这一阶段,也称为盲换向,非常重要,因为它与系统可靠性直接相关。如果盲换向配置不正确,电机将启动,失去同步并停止。
至关重要的是,在开环状态下,驱动器可以将电机加速到足够高的速度,以便进行准确的BEMF估计。它还应该能够在此开环状态下支持负载。达到交接速度后,驾驶员从开环切换到闭环。该切换速度将根据电机的转矩常数 (Kt) 而变化;也就是说,具有较高扭矩常数的电机需要较低的切换速度,反之亦然。
因此,驱动器应能够提供变速曲线以支持开环加速,提供可调电流以支持各种负载和可调切换速度。对于集成驱动器,您可以通过配置少量电可擦除可编程只读存储器(EEPROM)寄存器来实现这种盲启动。此功能可用于 DRV10983-Q1、DRV10987 或 DRV10983 等集成驱动器,或 DRV10x 系列的任何其他无传感器驱动器。
系数 A1 和 A2 设置加速度,Op2ClsThr 设置切换速度,也称为开环到闭环阈值。参见公式1:
如公式1所示,二阶加速度的优点之一是,它使您能够驱动电机以匹配机械负载曲线。它还允许软启动,这意味着电机将以较慢的速度启动,并随着速度的增加逐渐增加加速度,如图1和图2所示。此功能对于具有高惯量负载的电机很有用。
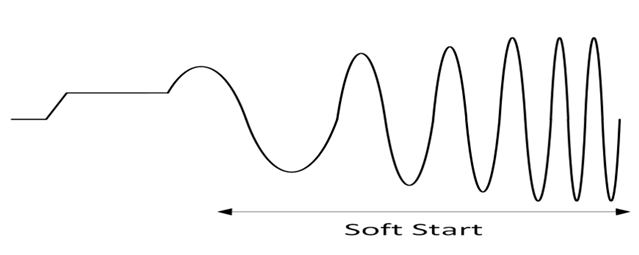
图 2:开环加速期间的软启动
集成驱动器不仅能够使用盲换向启动电机;它还能够通过软开环加速平稳地启动电机。这些功能将有助于旋转具有不同负载的各种电机。
审核编辑:郭婷
-
了解天线规格和操作,第2部分2017-05-05 1078
-
电压基准如何影响ADC性能,第2部分2018-05-15 1437
-
电动汽车用驱动电机系统 第2部分:试验方法2022-03-25 961
-
集成智能第1部分:EMI管理2022-10-28 863
-
LDO基础知识:噪声 - 第2部分2022-11-01 971
-
了解你的电池组:第2部分2022-11-03 834
-
电气过应力简介-第2部分2022-11-04 806
-
带NTC的恒温器-第2部分2022-11-21 936
-
使用Zio控制机械臂(第2部分)2022-12-30 1029
-
TFT液晶面板与三轴加速度计的配合使用–第2部分2023-02-24 2587
-
集成智能第3部分:电机从静止位置启动2023-03-15 2568
-
使用AWS的IoT环境站第2部分2023-07-04 741
-
电源设计方法-第2部分2024-09-06 536
-
如何进行电源设计–第2部分2024-09-07 638
-
智能网联汽车云控系统第2部分:车云数据交互规范2024-11-18 868
全部0条评论

快来发表一下你的评论吧 !
