

基于iToF的3D视觉测量方案
电子说
描述
与通过测量光传播时间直接计算距离的直接飞行时间(ToF)不同,间接飞行时间(iToF)技术从反射光脉冲的相位进行测量。本文将重点介绍iToF和当今部署该技术的诸多行业,包括机器人技术、物流、建筑测绘以及最近的智能交通系统(ITS)。
许多苛刻的应用具有许多要求和更多挑战
能够从iToF受益的应用要求包含一系列特性,包括视场、距离范围、反射率范围和3D帧率。这些对于ToF系统和ToF传感器的设计至关重要。由于灵活性,iToF可以为工厂安全等室内应用和监控或ITS等室外应用提供精确测量。iToF适用于反射率范围小的应用(如拾放机器人)和反射率范围大的应用(仓库/物流管理);适用于车内应用等短程应用和自动驾驶等远程应用;还适用于机器人导航等小视场应用和建筑/建筑测绘等大视场应用。
iToF如何运行?
iToF技术根据多个图像(或相位)来估计物体的距离。如图1所示,前两个图像是在180度相位下获得的,通过计算每个相位捕获的电荷比率可以估计距离,其中第三个图像则用于去除背景噪声。
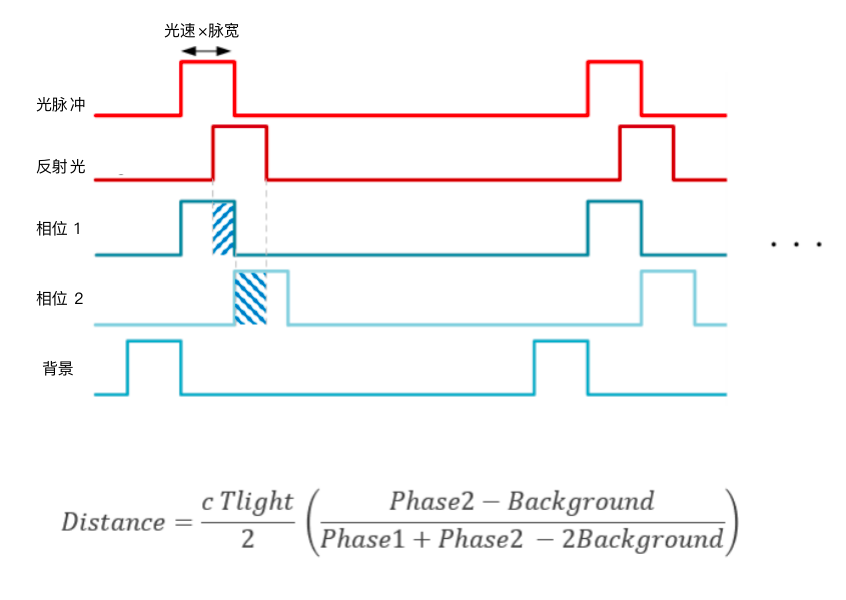
图1:iToF距离算法示例
“可靠的距离测量”在3D应用中意味着什么?这意味着非常精确和准确的测量,但又不限于此。也就是说不仅要确保精确和准确地获得测量结果,同时具有良好的角分辨率,运动模糊/伪影最小,又要可以以合理的性能感测最小和最大距离处的黑暗和明亮物体,等等。因此,可靠的距离测量与非常高的灵活性紧密相关,更灵活的传感器可以实现更可靠的测量。
无运动伪影的可靠测量
如上所述,在iToF中,需要多张图像来估计物体的距离。在所描述的示例中,需要三个图像(两个相位+背景)。如果使用当今最常见的单暂存节点像素传感器,则需要依次曝光和读出多个相位。拍摄一次光以获得相位0,另一次以获得相位1,然后在没有光和读出的情况下运行第三次采集以获取背景。只有这样才能计算3D图像。因此,如果有移动的物体,就会出现运动伪影,因为物体在每次捕捉中都会处于不同的位置。此外,光线需要拍摄两次,每个相位一次。 使用多暂存节点像素传感器,例如所示示例的3暂存节点像素,所有曝光和读出均以交错方式进行,因此所有相位几乎都是并行采集的,从而最大限度地减少运动伪影。此外,由于可以使用单列光脉冲即可捕获所有相位,因此它降低了平均光功率,这从眼睛安全和功耗角度来看都很重要。 图2描述了这两种情况:
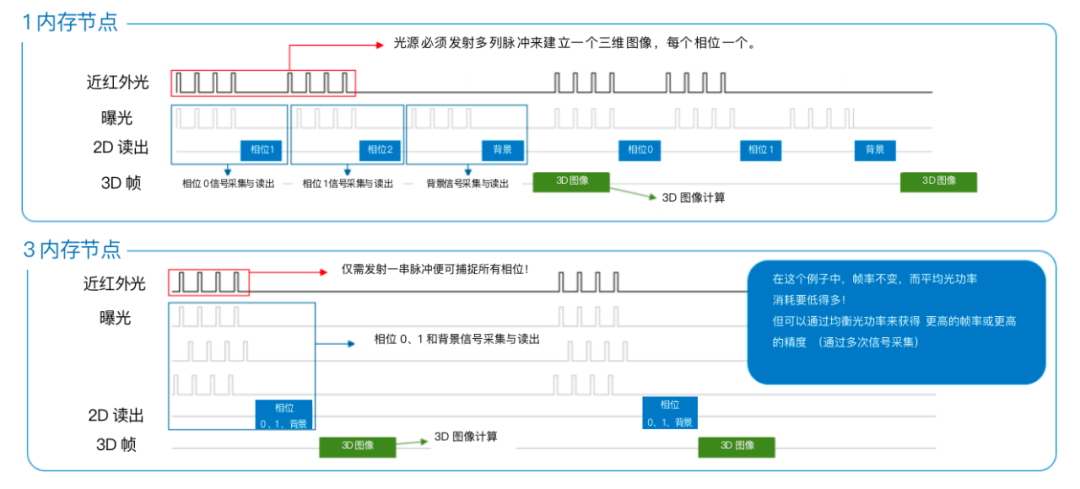
图2:单暂存节点和多暂存节点像素之间的差异
请注意,运动伪影和运动模糊之间的区别类似于2D视觉中卷帘快门和全局快门之间的区别。运动模糊可以稍微扭曲快速移动的物体,但不会提供错误信息,而运动伪影可以极大地改变物体的外观并提供错误的测量结果,这在某些应用中可能会产生重大后果。
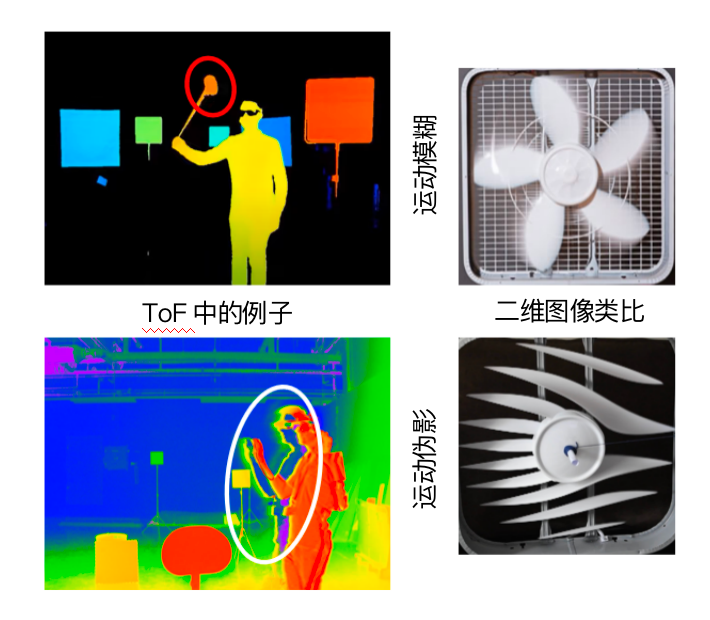
图3:运动模糊/运动伪影 - 两种不同的现象
高动态范围的可靠测量
ToF的另一个关键问题是动态范围。由于物体的反射率和应用所需的距离范围的综合作用,ToF本质上是一种动态范围非常高的应用。为了说明这一点,假设一个原始应用旨在检测反射率在15%到85%之间且距离为0.5米到6米的物体,需要改进以检测反射率在1.8%到95%之间且距离达10米的物体。在这些条件下,新案例需要的动态范围是原始案例的25倍以上。这样的要求仅靠像素本身的满井容量,不足以满足。 Teledyne e2v的Hydra3D ToF CMOS图像传感器嵌入特定技术来满足如此巨大的动态范围要求,即通过多次捕获的非破坏性读出与高帧率相结合,使其适用于大多数应用案例。
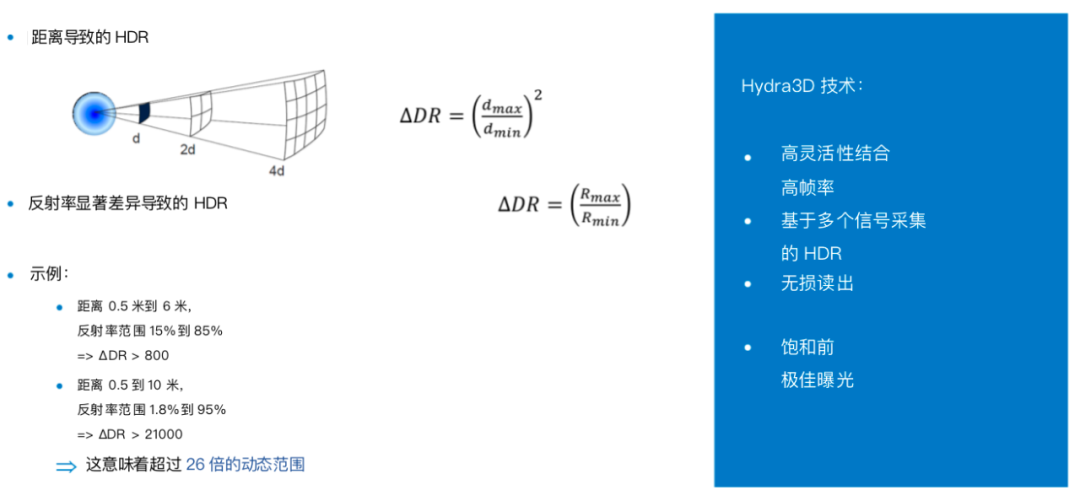
图4:ToF本质上是一个非常高动态范围的应用,传感器必须管理它
在所有条件下都具有高度灵活性的可靠测量
在ToF中,蛮力通常不是一个好主意。在距离范围、反射率、动态等方面具有高度灵活性以适应非常广泛的情况,显然是一项重要优势。在Hydra3D中,单个触发器启动一系列采集和读出并且非常容易编程,从而成为一个非常强大的工具,适应每个应用的条件。这看似复杂实际上很简单,如图5所示。 第一个蓝色轮廓矩形是三个相位的曝光和读出,产生一个3D图像。可以在每个测量序列(绿色轮廓矩形)中进行多次采集(蓝色轮廓矩形),以增加动态范围或提高精度。此外,具有多个测量序列允许在不同的距离范围内进行测量,或以不同的精度水平进行测量,或执行2D捕获。这一切都发生在一个触发器中。最重要的是,序列可以逐帧实时更改,而无需停止传感器。
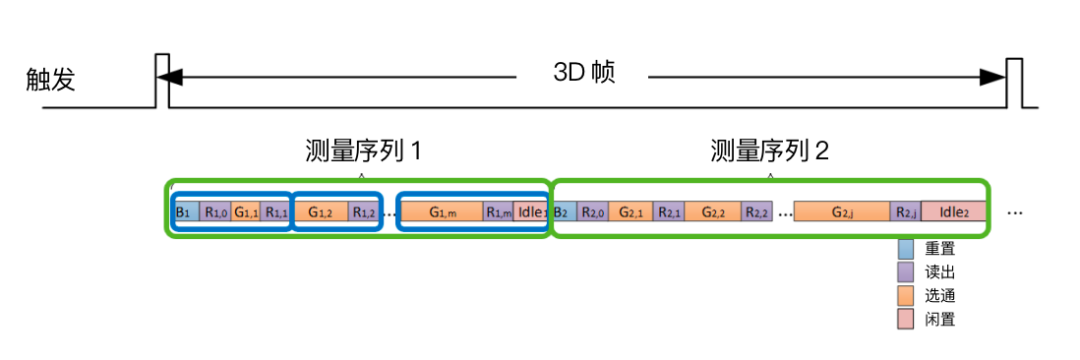
图5:高度的灵活性允许拥有不同的测量序列以完美地满足应用需求 这种高可配置性可用于为每个应用在距离范围、反射率范围、精度、帧率、光功率等之间找到最佳权衡。 现在让我们看看这种灵活性优势的一些示例: 对于距离范围和反射率范围较小的应用,具有单个3D采集的配置(仅第一个蓝色轮廓矩形)就足够了。在这种情况下,动态范围不会是最大的,但可以达到100 fps的帧率,并且完全没有运动模糊。 对于由于距离范围和/或反射率范围大而需要使用HDR功能的应用,可以执行多次采集和读出(几个蓝色轮廓矩形)以增加动态范围。通过这样的应用,可以在10米范围内实现大约25 fps,目标反射率在15%到85%之间。
对于覆盖10米距离范围但使用三个不同范围以在整个范围内保持高精度的应用。为此,可以使用多个测量序列(绿色轮廓矩形)实时从一个切换到另一个,具体取决于目标对象的位置。因此,可以在较小的距离范围内达到精度,但覆盖的距离范围更大。
对环境稳健的可靠测量
最后一个挑战是解决多系统干扰问题。由于ToF需要主动照明,因此一个系统可能会受到在同一区域同时工作的另一个系统发出的光的干扰。这会导致不正确的距离测量。为了对这些干扰具有稳健性,多系统管理被嵌入到Hydra3D传感器的片上。正因为如此,系统之间可以完美运行,不会造成任何相互干扰,也不会产生任何联系。
传感器级创新
传感器级别的创新有助于克服使许多飞行时间应用难以有效实施的挑战。像Teledyne e2v的Hydra3D这样的传感器实现了所有这些创新:它高于市场上的平均空间分辨率,具有832 x 600像素,支持高视场和良好的角分辨率。这是一个3暂存节点像素,适用于三相位iToF技术,即使对于快速移动的物体也能进行可靠的3D检测而不会出现运动伪影。它还可以降低功耗并提高人眼安全性。此外,它在管理高动态范围(这在ToF中非常重要)方面非常灵活,使其适用于所有环境,并且可以配置用于距离测量,包括交错2D和3D信息捕获。最后,它集成了一个片上功能,可对在同一区域工作的其他系统造成的干扰提供稳健性,因此相机制造商在设计系统时无需解决此问题。 由于机器人、物流、建筑测绘和ITS等行业需要更精确和可靠的测量,间接飞行时间技术将使测量具有稳健性和灵活性,没有伪影。
审核编辑:汤梓红
-
友思特技术 | 智能iToF技术:开启高性价比3D视觉新纪元2026-03-06 284
-
iDS iToF Nion 3D相机,开启高性价比3D视觉新纪元!2025-12-15 716
-
iTOF技术,多样化的3D视觉应用2025-09-05 383
-
多维精密测量:半导体微型器件的2D&3D视觉方案2025-01-10 1789
-
基于iToF的3D视觉测量方案2023-03-13 1141
-
【世说芯品】ADI推出首款用于3D景深测量和视觉系统的高分辨率模块2022-07-05 1227
-
ADI公司推出首款用于3D景深测量和视觉系统的高分辨率模块2022-06-28 3343
-
Zivid 3D视觉解决方案的优势是什么2022-04-28 3800
-
求一种3D视觉技术方案2021-11-09 2577
-
一文带你看懂3D视觉2021-09-01 7837
-
谈3D视觉应用方案光学测量分类以及其原理2020-12-05 6403
-
3D视觉的测量原理2020-12-01 2842
-
3D视觉及AR的测量与应用2020-06-19 5263
-
哪位大侠用过imaging-lab 开发过3D视觉测量的项目,求指点2015-10-21 3823
全部0条评论

快来发表一下你的评论吧 !
